内螺旋机器人全覆盖-matlab代码
Posted 墨翰
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了内螺旋机器人全覆盖-matlab代码相关的知识,希望对你有一定的参考价值。
一、内螺旋机器人覆盖
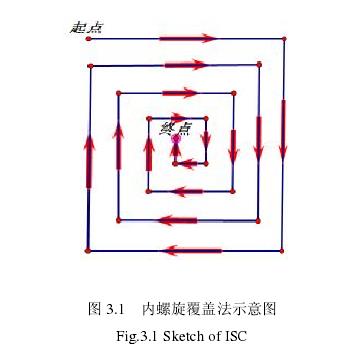
内螺旋覆盖法(internal spiral coverage, ISC)最初是基于接触传感器的算法研究的基础上由 Butler 等人提出的。该算法的基本思想是:移动机器人按照顺时针或者逆时针方向前进来遍历整个工作区域。当机器人运行的前方没有障碍物的时候,机器人就前行一步;若机器人的前方有障碍物,则移动机器人按照某个规则顺时针或者逆时针旋转 90 度。如图 3.1 表示的就是典型的内螺旋覆盖法的示意图。该方法算法简单,方便低成本软件设计实现,无需采用现今通用的效益函数即可进行规划。
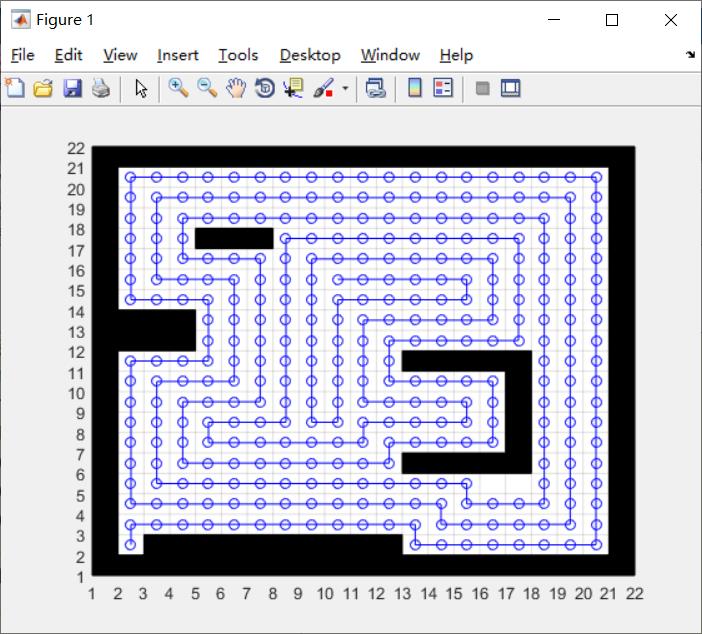
具体效果如图所示:
二、代码:https://download.csdn.net/download/qq_44152192/19040801?spm=1001.2014.3001.5503
以上是关于内螺旋机器人全覆盖-matlab代码的主要内容,如果未能解决你的问题,请参考以下文章