HI3861学习笔记——CMSIS-RTOS2接口
Posted Leung_ManWah
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了HI3861学习笔记——CMSIS-RTOS2接口相关的知识,希望对你有一定的参考价值。
一、CMSIS-RTOS2接口简介
CMSIS是Cortex微控制器软件接口标准(Cortex Microcontroller Software Interface Standard)是ARM和一些编译器厂家以及半导体厂家共同遵循的一套标准,是由ARM专门针对Cortex-M系列提出的标准。在该标准的约定下,ARM和芯片厂商会提供一些通用的API接口来访问Cortex内核以及一些专用外设,以减少更换芯片以及开发工具等移植工作所带来的金钱以及时间上的消耗。
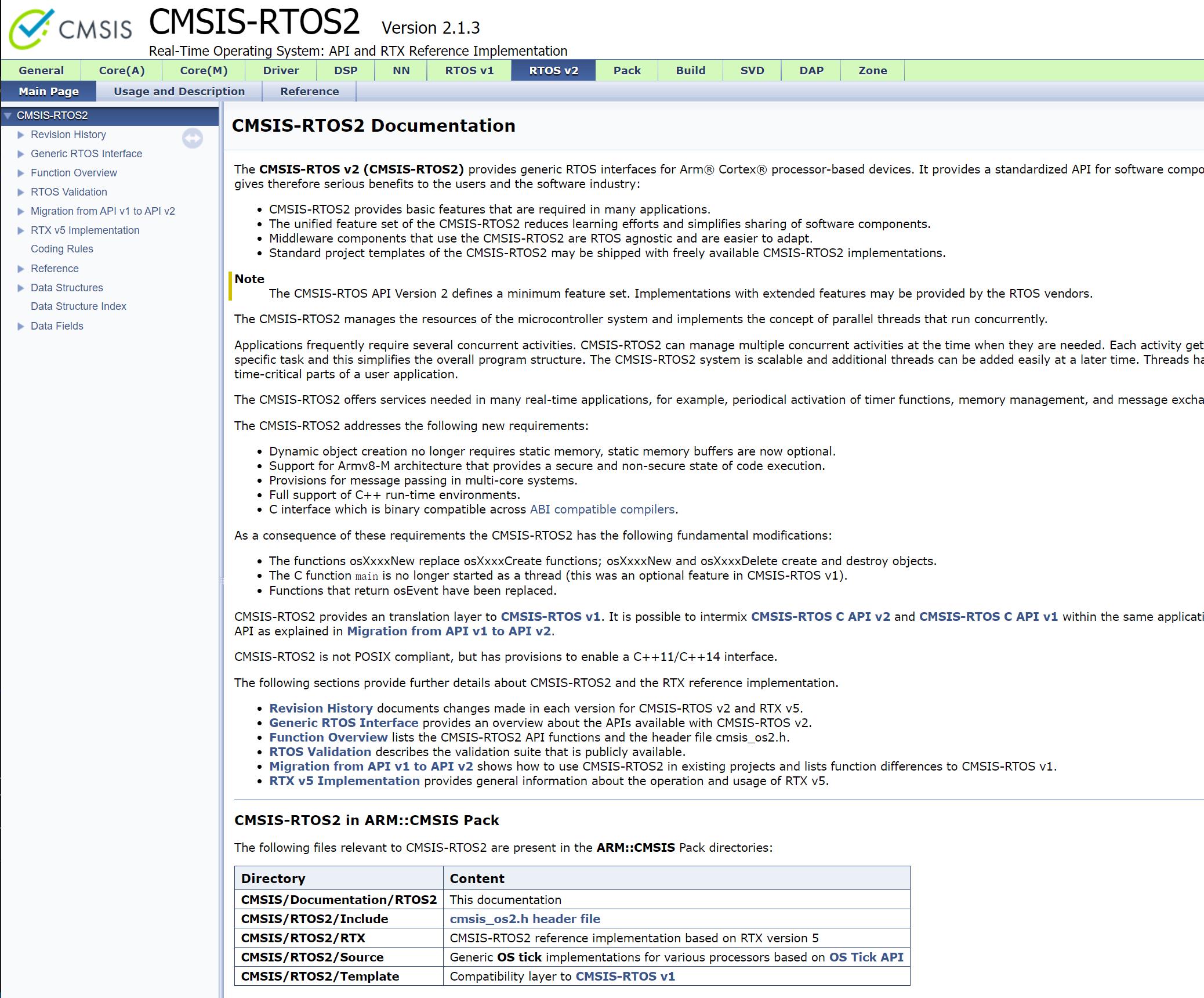
**CMSIS-RTOS2(CMSIS-RTOS API Version 2)**是Arm® Cortex®-M 处理器的通用的RTOS接口。为需要RTOS功能的软件组件提供了标准化的API。
CMSIS-RTOS2是一个通用的API,它与底层的RTOS内核无关,写应用序的程序员在用户代码中调用CMSISRTOS2 API函数,可以更方便地将应用程序从一个RTOS到另一个RTOS,使用CMSIS-RTOS2 API的中间件也可以避免很多不必要的移植工作。
典型的 CMSIS-RTOS2 API 实现与现有的实时内核接口。CMSIS-RTOS2 API 提供以下属性和功能:
- 函数名称,标识符和参数是描述性的,易于理解的。这些功能强大而灵活,减少了暴露给用户的功能数量。
- 线程管理允许您定义,创建和控制线程。
- 中断服务程序(ISR)可以调用一些 CMSIS-RTOS 功能。 当 CMSIS-RTOS 函数不能从 ISR 上下文中调用时,它会拒绝调用并返回错误代码。
- 三种不同的事件类型支持多个线程和/或 ISR 之间的通信:
- 线程标志: 可用于向线程指示特定条件。
- 事件标志: 可用于向线程或 ISR 指示事件。
- 消息: 可以发送到线程或 ISR 。消息缓冲在队列中。
- 互斥管理和信号量已合并。
- CPU 时间可以安排以下功能:
- 超时参数包含在许多 CMSIS-RTOS 功能中,以避免系统锁定。当指定超时时,系统会等待,直到资源可用或发生事件。在等待时,运行其他线程。
- osDelay 和 osDelayUntil 函数将线程置于 WAITING 状态一段指定的时间。
- osThreadYield 提供协作式线程切换并将执行传递给具有相同优先级的另一个线程。
- 定时器管理功能用于触发功能的执行。
二、鸿蒙与CMSIS-RTOS2接口联系
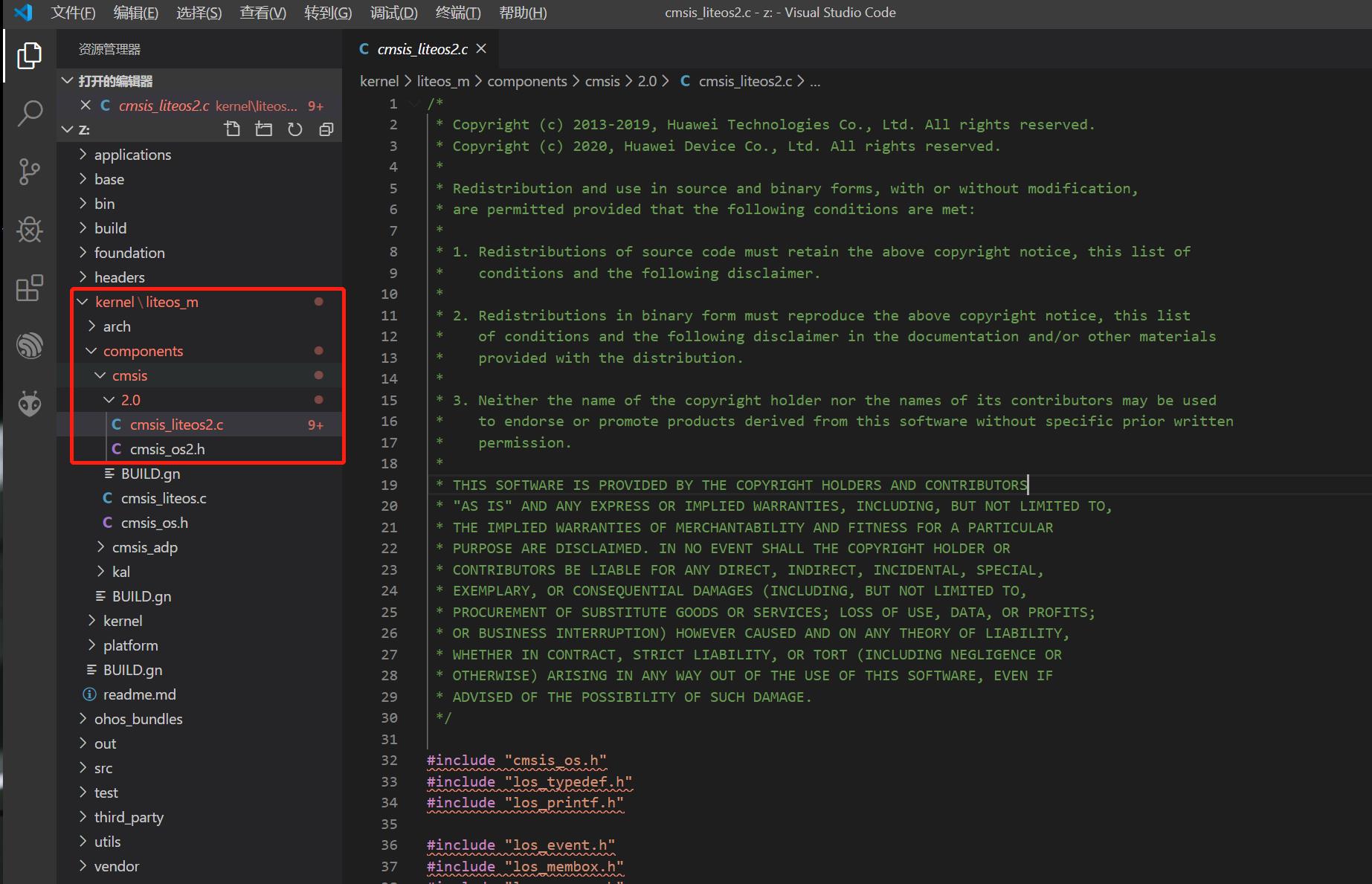
鸿蒙在CMSIS-RTOS2接口中封装了LiteOS-m的内核代码
CMSIS-RTOS2实现 : //kernel/liteos_m/components/cmsis/2.0/cmsis_liteos2.c

例如 osKernelInitialize() 中调用了 LOS_KernelInit()
osStatus_t osKernelInitialize(void)
{
if (OS_INT_ACTIVE) {
return osErrorISR;
}
if (g_kernelState != osKernelInactive) {
return osError;
}
if (LOS_OK == LOS_KernelInit()) {
g_kernelState = osKernelReady;
return osOK;
} else {
return osError;
}
}
osThreadNew() 中调用了 LOS_TaskCreate()
osThreadId_t osThreadNew(osThreadFunc_t func, void *argument, const osThreadAttr_t *attr)
{
UINT32 uwTid;
UINT32 uwRet;
LosTaskCB *pstTaskCB = NULL;
TSK_INIT_PARAM_S stTskInitParam;
if (OS_INT_ACTIVE) {
return NULL;
}
if ((attr == NULL) || (func == NULL) || (attr->priority < osPriorityLow1) ||
(attr->priority > osPriorityAboveNormal6)) {
return (osThreadId_t)NULL;
}
(void)memset_s(&stTskInitParam, sizeof(TSK_INIT_PARAM_S), 0, sizeof(TSK_INIT_PARAM_S));
stTskInitParam.pfnTaskEntry = (TSK_ENTRY_FUNC)func;
#ifndef LITEOS_WIFI_IOT_VERSION
stTskInitParam.uwArg = (UINT32)argument;
#else
stTskInitParam.auwArgs[0] = (UINT32)argument;
#endif
stTskInitParam.uwStackSize = attr->stack_size;
stTskInitParam.pcName = (CHAR *)attr->name;
stTskInitParam.usTaskPrio = OS_TASK_PRIORITY_LOWEST - ((UINT16)(attr->priority) - LOS_PRIORITY_WIN); /* 0~31 */
uwRet = LOS_TaskCreate(&uwTid, &stTskInitParam);
if (LOS_OK != uwRet) {
return (osThreadId_t)NULL;
}
pstTaskCB = OS_TCB_FROM_TID(uwTid);
return (osThreadId_t)pstTaskCB;
}
osDelay() 中调用了 LOS_HalDelay()
osStatus_t osDelay(uint32_t ticks)
{
UINT32 uwRet = 0;
if (ticks == 0) {
return osOK;
}
if (osKernelGetState() != osKernelRunning) {
uwRet = LOS_HalDelay(ticks);
} else {
uwRet = LOS_TaskDelay(ticks);
}
if (uwRet == LOS_OK) {
return osOK;
} else {
return osError;
}
}
三、如何使用CMSIS-RTOS2接口
1、在业务代码中包含 “cmsis_os2.h”
2、通过调用 “cmsis_os2.h” 中的API函数使用系统相关功能
将文件添加到项目后,用户可以开始使用 CMSIS-RTOS 功能。下面提供了一个代码示例:
/*----------------------------------------------------------------------------
* CMSIS-RTOS 'main' function template
*---------------------------------------------------------------------------*/
#include "RTE_Components.h"
#include CMSIS_device_header
#include "cmsis_os2.h"
/*----------------------------------------------------------------------------
* Application main thread
*---------------------------------------------------------------------------*/
void app_main (void *argument) {
// ...
for (;;) {}
}
int main (void) {
// System Initialization
SystemCoreClockUpdate();
#ifdef RTE_Compiler_EventRecorder
// Initialize and start Event Recorder
EventRecorderInitialize(EventRecordError, 1U);
#endif
// ...
osKernelInitialize(); // Initialize CMSIS-RTOS
osThreadNew(app_main, NULL, NULL); // Create application main thread
osKernelStart(); // Start thread execution
for (;;) {}
}
四、更多API介绍
更多API介绍请参考:https://arm-software.github.io/CMSIS_5/RTOS2/html/index.html
• 由 Leung 写于 2021 年 5 月 24 日
以上是关于HI3861学习笔记——CMSIS-RTOS2接口的主要内容,如果未能解决你的问题,请参考以下文章