MSP430 DM430-A开发板学习笔记IO中断方式来实现按键检测
Posted 唯心主义者ww
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了MSP430 DM430-A开发板学习笔记IO中断方式来实现按键检测相关的知识,希望对你有一定的参考价值。
MSP430 DM430-A开发板学习笔记(五)IO中断方式来实现按键检测
1.按键说明
在MSP430开发板中,有四个按键连接到P1,即
| 按键 | P1口 |
|---|---|
| key1 | P1.0 |
| key2 | P1.1 |
| key3 | P1.2 |
| key4 | P1.3 |
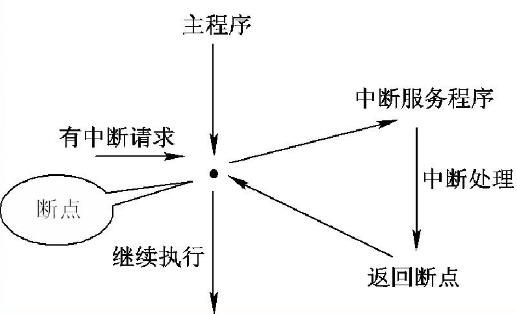
2.中断流程图
中断流程图如下,在用C语言实现我们想要的功能的时候,我们可能需要使用switch、if语句对某些变量进行多次判别,这样会加长我们的代码并且不易观看,使用外部中断的好处就是:
1.可以在中断服务程序中对变量的值进行修改,从而达到随时更改变量值的目的
2.对一些变量可以进行单独控制,减少主程序代码的长度
3.中断配置
我们要开启P1口的低四位中断,使用下降沿触发中断,意思就是,我们按下按键,某个p1口由高电平状态→低电平状态,便产生了一个下降沿,从而触发了中断程序,代码如下:
//*************************************************************************
// 初始化IO口子程序
//*************************************************************************
void Port_init()
{
P1SEL = 0x00; //P1普通IO功能
P1DIR = 0xF0; //P10~P13输入模式,外部电路已接上拉电阻
P1IE = 0x0F; //开启P1低四位中断
P1IES = 0x0F; //下降沿触发中断
P1IFG = 0x00; //软件清零中断标志寄存器
LED8DIR = 0xFF; //P6口输出模式
LED8 = 0xFF; //先关闭所有LED
}
在中断程序中,我们判别是哪个按键按下,并且清零中断标志寄存器
中断标志寄存器里面存储了中断的信息,我们正是依靠它来判别出是哪个按键按下来了,所以判别出来了之后还需要将其清零,方便下次中断操作,代码如下:
//**********************************************************************
// P1口中断服务程序,需要判断
//**********************************************************************
#pragma vector = PORT1_VECTOR
__interrupt void P1_IRQ(void)
{
switch(P1IFG&0x0F)
{
case 0x01: key=0x01;P1IFG=0x00;state = 'D';break; // 引脚0对应S1中断,必须手动清标志位,点亮D1D2
case 0x02: key=0x02;P1IFG=0x00;state = 'N';break; // 引脚1对应S2中断,必须手动清标志位,点亮D3D4
case 0x04: key=0x03;P1IFG=0x00;break; // 引脚2对应S3中断,必须手动清标志位,点亮D5D6
case 0x08: key=0x04;P1IFG=0x00;break; // 引脚3对应S4中断,必须手动清标志位,点亮D7D8
}
}
在中断程序中,我们的操作是:
按下key1,给全局变量state赋值‘D’
按下key2,给全局变量state赋值‘N’
4.完整代码
该代码有两部分,一个是配置文件Config.h,另外一个是主文件main.c
Config.h
/********************************************************************
//DM430-L型最小系统板外部资源配置文件Config.h
//包含板载各个资源的硬件配置,如果用户使用过程中,对应的硬件发生了更改,可利用该头文件更改使用
//SD/MMC卡初始化硬件配置未包含
********************************************************************/
//延时函数,IAR自带,经常使用到
#define CPU_F ((double)8000000) //外部高频晶振8MHZ
//#define CPU_F ((double)32768) //外部低频晶振32.768KHZ
#define delay_us(x) __delay_cycles((long)(CPU_F*(double)x/1000000.0))
#define delay_ms(x) __delay_cycles((long)(CPU_F*(double)x/1000.0))
//自定义数据结构,方便使用
#define uchar unsigned char
#define uint unsigned int
#define ulong unsigned long
//8个LED灯,连接在P6口,可通过断开电源停止使用,ADC使用时断开电源
#define LED8DIR P6DIR
#define LED8 P6OUT //P6口接LED灯,8个
//4个独立按键连接在P10~P13
#define KeyPort P1IN //独立键盘接在P10~P13
//串口波特率计算,当BRCLK=CPU_F时用下面的公式可以计算,否则要根据设置加入分频系数
#define baud 9600 //设置波特率的大小
#define baud_setting (uint)((ulong)CPU_F/((ulong)baud)) //波特率计算公式
#define baud_h (uchar)(baud_setting>>8) //提取高位
#define baud_l (uchar)(baud_setting) //低位
//RS485控制管脚,CTR用于控制RS485处于收或者发状态
#define RS485_CTR1 P5OUT |= BIT2; //控制线置高,RS485发送状态
#define RS485_CTR0 P5OUT &= ~BIT2; //控制线置低,RS485接收状态
//2.8寸TFT彩屏显示控制相关硬件配置
#define RS_CLR P5OUT &= ~BIT5 //RS置低
#define RS_SET P5OUT |= BIT5 //RS置高
#define RW_CLR P5OUT &= ~BIT6 //RW置低
#define RW_SET P5OUT |= BIT6 //RW置高
#define RD_CLR P5OUT &= ~BIT7 //E置低
#define RD_SET P5OUT |= BIT7 //E置高
#define CS_CLR P5OUT &= ~BIT0 //CS置低
#define CS_SET P5OUT |= BIT0 //CS置高
#define RST_CLR P5OUT &= ~BIT3 //RST置低
#define RST_SET P5OUT |= BIT3 //RST置高
#define LE_CLR P5OUT &= ~BIT1 //LE置低
#define LE_SET P5OUT |= BIT1 //LE置高
//2.8寸TFT彩屏触摸屏控制相关硬件配置
#define PEN_CLR P2OUT &= ~BIT0 //PEN置低,触碰触摸屏时,Penirq引脚由未触摸时的高电平变为低电平
#define PEN_SET P2OUT |= BIT0 //PEN置高
#define PEN (P2IN & 0x01) //P2.0输入的值
#define TPDO_CLR P2OUT &= ~BIT1 //TPDO置低
#define TPDO_SET P2OUT |= BIT1 //TPDO置高
#define TPDOUT ((P2IN>>1)&0x01) //P2.1输入的值
#define BUSY_CLR P2OUT &= ~BIT3 //BUSY置低
#define BUSY_SET P2OUT |= BIT3 //BUSY置高
#define TPDI_CLR P2OUT &= ~BIT4 //TPDI置低
#define TPDI_SET P2OUT |= BIT4 //TPDI置高
#define TPCS_CLR P2OUT &= ~BIT5 //TPCS置低
#define TPCS_SET P2OUT |= BIT5 //TPCS置高
#define TPCLK_CLR P2OUT &= ~BIT6 //TPCLK置低
#define TPCLK_SET P2OUT |= BIT6 //TPCLK置高
//彩屏/12864液晶/1602液晶的数据口,三液晶共用
#define DataDIR P4DIR //数据口方向
#define DataPort P4OUT //P4口为数据口
//12864/1602液晶控制管脚
#define RS_CLR P5OUT &= ~BIT5 //RS置低
#define RS_SET P5OUT |= BIT5 //RS置高
#define RW_CLR P5OUT &= ~BIT6 //RW置低
#define RW_SET P5OUT |= BIT6 //RW置高
#define EN_CLR P5OUT &= ~BIT7 //E置低
#define EN_SET P5OUT |= BIT7 //E置高
#define PSB_CLR P5OUT &= ~BIT0 //PSB置低,串口方式
#define PSB_SET P5OUT |= BIT0 //PSB置高,并口方式
#define RST_CLR P5OUT &= ~BIT1 //RST置低
#define RST_SET P5OUT |= BIT1 //RST置高
//12864应用指令集
#define CLEAR_SCREEN 0x01 //清屏指令:清屏且AC值为00H
#define AC_INIT 0x02 //将AC设置为00H。且游标移到原点位置
#define CURSE_ADD 0x06 //设定游标移到方向及图像整体移动方向(默认游标右移,图像整体不动)
#define FUN_MODE 0x30 //工作模式:8位基本指令集
#define DISPLAY_ON 0x0c //显示开,显示游标,且游标位置反白
#define DISPLAY_OFF 0x08 //显示关
#define CURSE_DIR 0x14 //游标向右移动:AC=AC+1
#define SET_CG_AC 0x40 //设置AC,范围为:00H~3FH
#define SET_DD_AC 0x80 //设置DDRAM AC
#define FUN_MODEK 0x36 //工作模式:8位扩展指令集
//颜色代码,TFT显示用
#define White 0xFFFF //显示颜色代码
#define Black 0x0000
#define Blue 0x001F
#define Blue2 0x051F
#define Red 0xF800
#define Magenta 0xF81F
#define Green 0x07E0
#define Cyan 0x7FFF
#define Yellow 0xFFE0
//NRF2401模块控制线
#define RF24L01_CE_0 P1OUT &=~BIT5 //CE在P15
#define RF24L01_CE_1 P1OUT |= BIT5
#define RF24L01_CSN_0 P2OUT &=~BIT7 //CS在P27
#define RF24L01_CSN_1 P2OUT |= BIT7
#define RF24L01_SCK_0 P3OUT &=~BIT3 //SCK在P33
#define RF24L01_SCK_1 P3OUT |= BIT3
#define RF24L01_MISO_0 P3OUT &=~BIT2 //MISO在P32
#define RF24L01_MISO_1 P3OUT |= BIT2
#define RF24L01_MOSI_0 P3OUT &=~BIT1 //MOSI在P31
#define RF24L01_MOSI_1 P3OUT |= BIT1
#define RF24L01_IRQ_0 P1OUT &=~BIT4 //IRQ在P14
#define RF24L01_IRQ_1 P1OUT |= BIT4
//DS18B20控制脚,单脚控制
#define DQ_IN P1DIR &= ~BIT7 //设置输入,DS18B20接单片机P53口
#define DQ_OUT P1DIR |= BIT7 //设置输出
#define DQ_CLR P1OUT &= ~BIT7 //置低电平
#define DQ_SET P1OUT |= BIT7 //置高电平
#define DQ_R P1IN & BIT7 //读电平
//红外接收头H1838控制脚,单脚控制
#define RED_IN P1DIR &= ~BIT6 //设置输入,红外接收头接单片机PE3口
#define RED_OUT P1DIR |= BIT6 //设置输出
#define RED_L P1OUT &= ~BIT6 //置低电平
#define RED_H P1OUT |= BIT6 //置高电平
#define RED_R (P1IN & BIT6) //读电平
//***********************************************************************
// 系统时钟初始化,外部8M晶振
//***********************************************************************
void Clock_Init()
{
uchar i;
BCSCTL1&=~XT2OFF; //打开XT2振荡器
BCSCTL2|=SELM1+SELS; //MCLK为8MHZ,SMCLK为8MHZ
do{
IFG1&=~OFIFG; //清楚振荡器错误标志
for(i=0;i<100;i++)
_NOP();
}
while((IFG1&OFIFG)!=0); //如果标志位1,则继续循环等待
IFG1&=~OFIFG;
}
//***********************************************************************
// 系统时钟初始化,内部RC晶振
//***********************************************************************
void Clock_Init_Inc()
{
uchar i;
// DCOCTL = DCO0 + DCO1 + DCO2; // Max DCO
// BCSCTL1 = RSEL0 + RSEL1 + RSEL2; // XT2on, max RSEL
DCOCTL = 0x60 + 0x00; //DCO约3MHZ,3030KHZ
BCSCTL1 = DIVA_0 + 0x07;
BCSCTL2 = SELM_2 + DIVM_0 + SELS + DIVS_0;
}
//***********************************************************************
// 系统时钟初始化,外部32.768K晶振
//***********************************************************************
void Clock_Init_Ex32768()
{
uchar i;
BCSCTL2|=SELM1 + SELM0 + SELS; //MCLK为32.768KHZ,SMCLK为8MHZ
do{
IFG1&=~OFIFG; //清楚振荡器错误标志
for(i=0;i<100;i++)
_NOP();
}
while((IFG1&OFIFG)!=0); //如果标志位1,则继续循环等待
IFG1&=~OFIFG;
}
//***********************************************************************
// MSP430内部看门狗初始化
//***********************************************************************
void WDT_Init()
{
WDTCTL = WDTPW + WDTHOLD; //关闭看门狗
}
main.c
/********************************************************************
//DM430-L型最小系统板4位独立按键作为中断按键使用测试程序,下降沿触发
//按不同的按键,显示不同的LED灯,具体请看程序,测试外部中断功能
********************************************************************/
#include <msp430x14x.h>
#include "Config.h"
uchar key;
uchar state;
//*************************************************************************
// 初始化IO口子程序
//*************************************************************************
void Port_init()
{
P1SEL = 0x00; //P1普通IO功能
P1DIR = 0xF0; //P10~P13输入模式,外部电路已接上拉电阻
P1IE = 0x0F; //开启P1低四位中断
P1IES = 0x0F; //下降沿触发中断
P1IFG = 0x00; //软件清零中断标志寄存器
LED8DIR = 0xFF; //P6口输出模式
LED8 = 0xFF; //先关闭所有LED
}
//**********************************************************************
// P1口中断服务程序,需要判断
//**********************************************************************
#pragma vector = PORT1_VECTOR
__interrupt void P1_IRQ(void)
{
switch(P1IFG&0x0F)
{
case 0x01: key=0x01;P1IFG=0x00;state = 'D';break; // 引脚0对应S1中断,必须手动清标志位,点亮D1D2
case 0x02: key=0x02;P1IFG=0x00;state = 'N';break; // 引脚1对应S2中断,必须手动清标志位,点亮D3D4
case 0x04: key=0x03;P1IFG=0x00;break; // 引脚2对应S3中断,必须手动清标志位,点亮D5D6
case 0x08: key=0x04;P1IFG=0x00;break; // 引脚3对应S4中断,必须手动清标志位,点亮D7D8
}
}
//*************************************************************************
// 主程序
//*************************************************************************
void main(void)
{
WDT_Init(); //看门狗设置
Clock_Init(); //系统时钟设置
Port_init(); //系统初始化,设置IO口属性
delay_ms(100); //延时100ms
_EINT(); //使能中断
while(1)
{
LED8DIR = 0xFF; //P6口输出模式
switch(state)
{
case 'D' :
LED8 = 0xBF;//D7亮
break;
case 'N' :
LED8 = 0x7F;//D8亮
break;
}
}
}
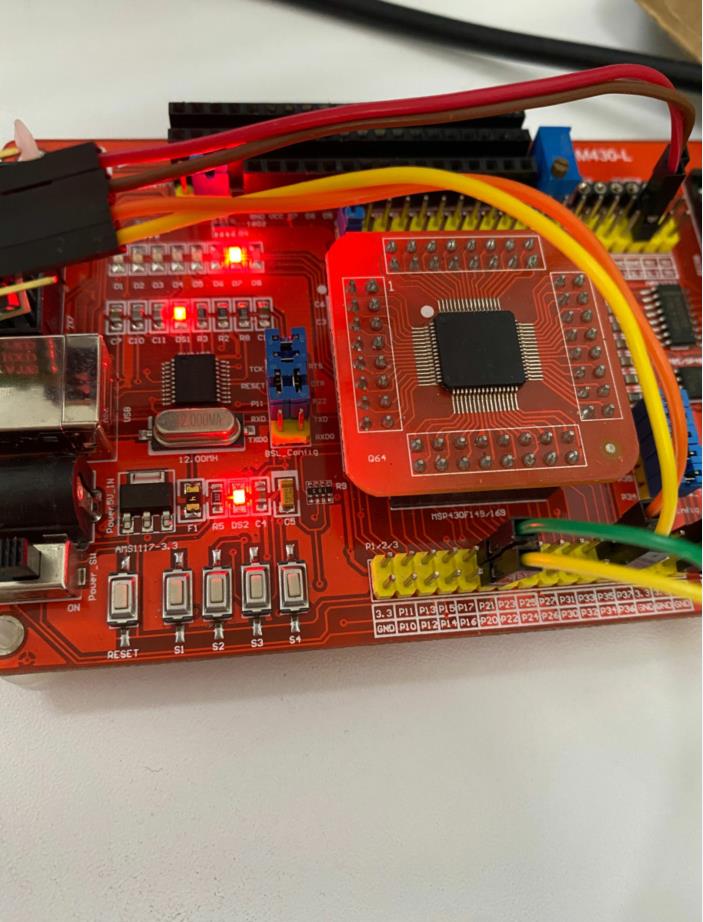
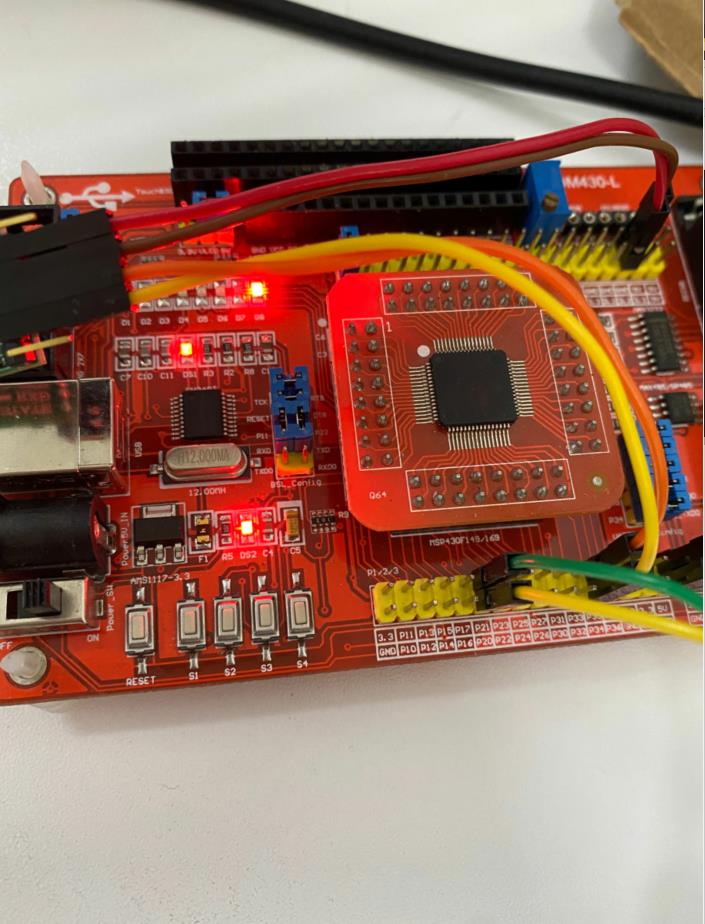
5.实物效果图
按下key1,第7个灯亮
按下key2,第8个灯亮
以上是关于MSP430 DM430-A开发板学习笔记IO中断方式来实现按键检测的主要内容,如果未能解决你的问题,请参考以下文章