SLAM学习笔记-地图类型
Posted 殇堼
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了SLAM学习笔记-地图类型相关的知识,希望对你有一定的参考价值。
1.点云地图
是由无数的点云构成。
优点:点云地图能够在模型中尽可能地保留原始的环境量测信息,同时能够更好的描述环境。由于点云地图能够在模型中保留大量的环境信息,研究人员基于点云进行了环境感知建模相关的研究。例如三维重建。
缺点:由于点云地图需要在环境模型中存储大量无序的三维数据点,即便是采取专用的处理方法,如点云库PCL(Point Cloud Library),其实时性仍然不理想并且随之会带来大量的存储和运算开销,无法做到对数据进行实时处理。因此,其在实际的机器人感知避障系统中使用较少。
2.栅格地图
栅格映射目前在机器人领域使用的最为广泛,它将环境划分为若干个栅格,在每个栅格中会存储占据或高程信息。目前的栅格地图可以根据其栅格内存储数据的差异分为二维栅格地图、高程栅格地图与三维栅格地图。概率占据栅格地图中每个栅格都存储着概率化的占据信息。
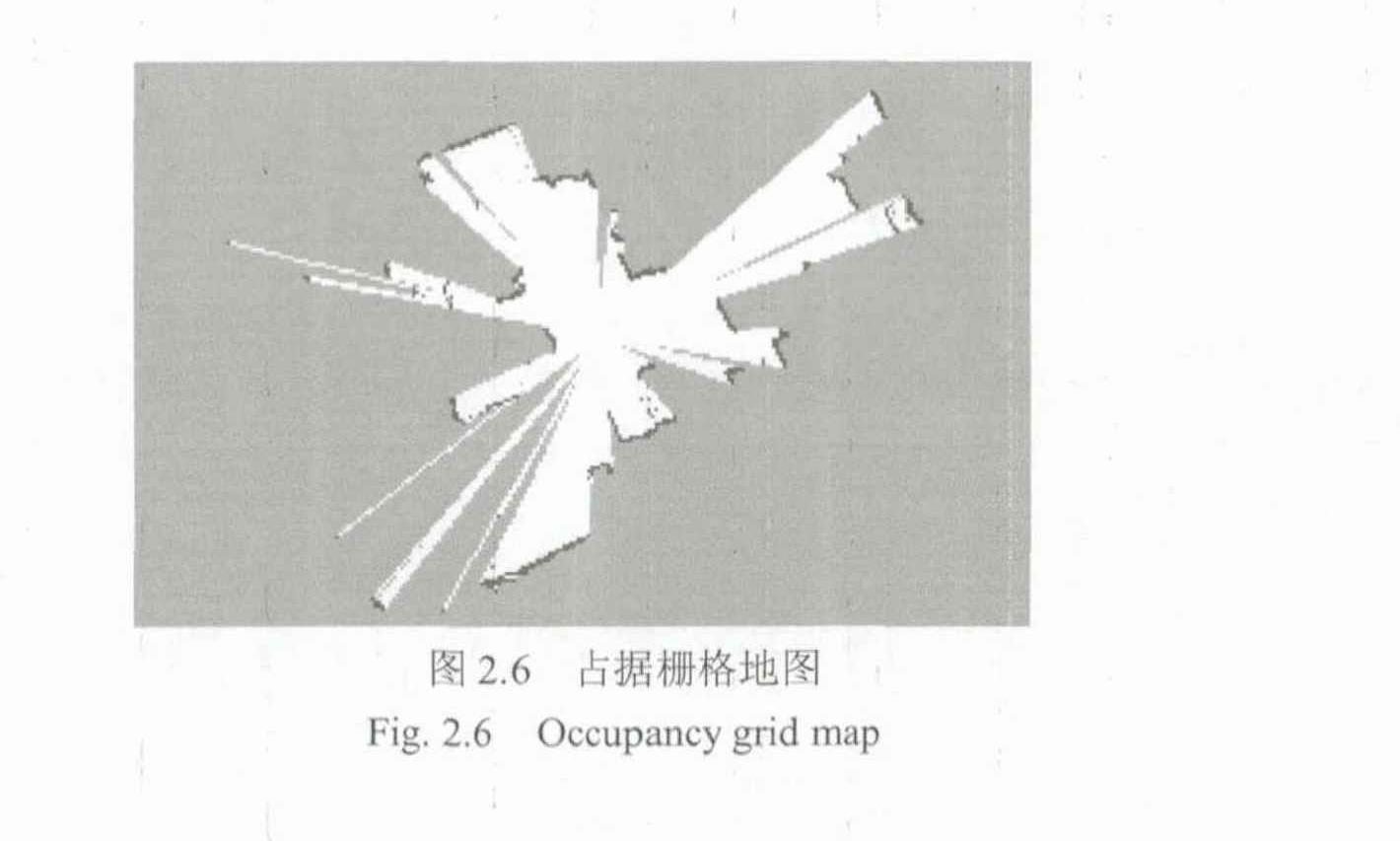
2.1二维占据栅格地图
通过二维栅格单元的颜色表示地图的不同状态。
栅格单元具有三种状态:占据(Occupied), 空闲(Free) 和未知( Unknown),占据表示障碍物区域,空闲表示无障碍物的开放区域,未知表示传感器没有探测的区域。
如图所示,黑色区域表示室内墙壁和桌子设备等障碍物,白色区域表示室内已探索的开放空间,深灰色区域表示传感器没有探测的到的空间。
优点:
缺点:因为只能存储二维环境(环境中的一个切面)中的障碍信息,无法对机器人周围环境有更丰富的描述,因此它只能适用于结构化且简单的环境中进行感知。但其单一的数据结构与较低的数据存储要求特别适合计算频率较高局部轨迹规划。
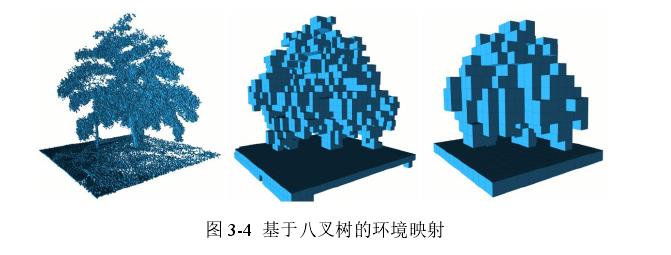
2.2三维占据栅格地图
二维占据栅格地图向三维空间延申可以很自然的扩展出三维空间的占据地图。
八叉树结构可用于构建三维占据地图。如下图给出一种基于八叉树的集成映射系统,称为Octomap,它实现了对环境的有效描述,相对于二维占据栅格地图有着更少的歧义性。但是地图对存储空间的开销较大且遍历地图所用的计算复杂度较大,相较于移动机器人有限的计算资源,并不适用于需要实时路径搜索与规划的地面移动机器人。
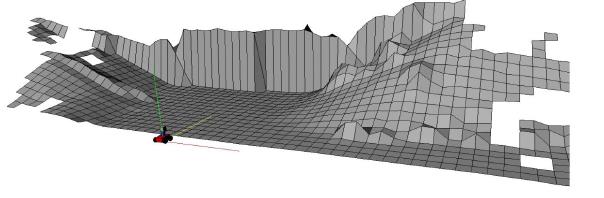
2.3 2.5 维高程栅格地图
在均衡于二维占据栅格和八叉树的优势与劣势之后,针对于地面移动机器人的局部环境感知,2.5 维高程栅格地图的使用是一种可行的替代方法,如图3-5。在这种地图中,高度结构被保留在一个更紧凑的二维数组中,其中每个单元存储表示环境中一个小区域的映射点的高度。继而,研究人员对地图映射的环境区域进行了分辨率的划分,并使用多层思想提升了对空间悬挂物的描述。这样可以高效的表征环境中的
障碍物特征信息,同时其环境内存储的数据量相对较小,具有更更小的维护成本与更好的实时性。
以上是关于SLAM学习笔记-地图类型的主要内容,如果未能解决你的问题,请参考以下文章