OpenCV 车道线提取
Posted ʚVVcatɞ
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了OpenCV 车道线提取相关的知识,希望对你有一定的参考价值。
在车道线检测中,使用的是HSL颜色空间,其中H表示色相,即颜色,S表示饱和度,即颜色的纯度,L表示颜色的明亮程度。
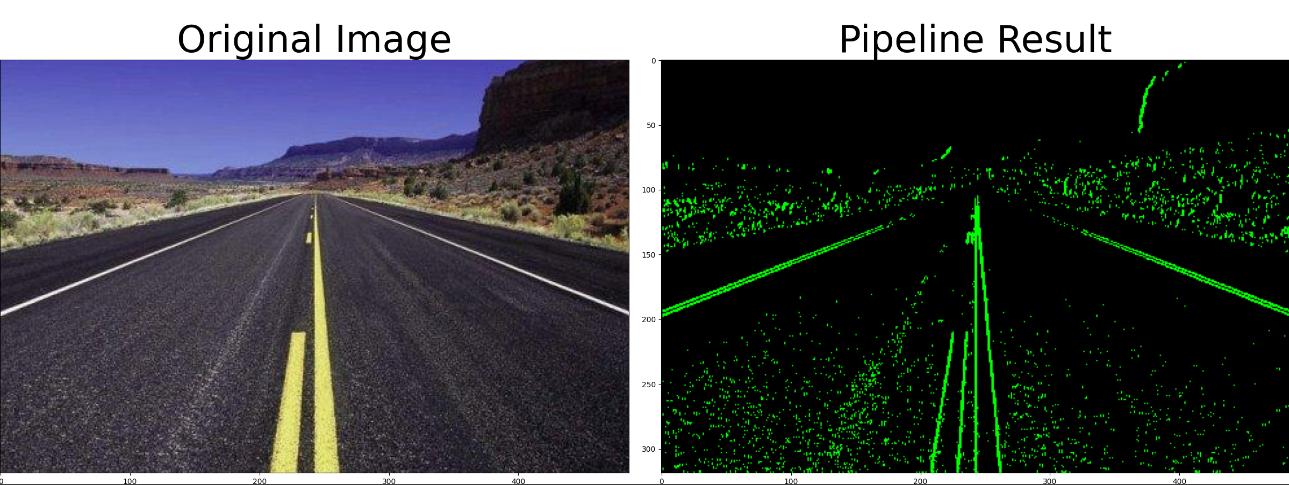
本案例基于图像的梯度和颜色特征,定位车道线的位置。
在这里选用Sobel边缘提取算法,Sobel相比于Canny的优秀之处在于,它可以选择横向或纵向的边缘进行提取。从车道的拍摄图像可以看出,车道线在横向上的边缘突变是需要关心的问题。OpenCV提供的cv2.Sobel()函数,将进行边缘提取后的图像做二进制图的转化,即提取到边缘的像素点显示为白色(值为1),未提取到边缘的像素点显示为黑色(值为0)。由于只使用边缘检测,在有树木阴影覆盖的区域时,虽然能提取出车道线的大致轮廓,但会同时引入的噪声,给后续处理带来麻烦。所以在这里引入颜色阈值来解决这个问题。
import cv2
import numpy as np
import matplotlib.pyplot as plt
import matplotlib.image as mpimg
def pipeline(img, s_thresh=(170, 255), sx_thresh=(50, 300)):
img = np.copy(img)
#1.将图像转换为HLS色彩空间,并分离各个通道
hls = cv2.cvtColor(img, cv2.COLOR_RGB2HLS).astype(np.float64)
h_channel = hls[:, :, 0]
l_channel = hls[:, :, 1]
s_channel = hls[:, :, 2]
#2.利用sobel计算x方向的梯度
sobelx = cv2.Sobel(l_channel, cv2.CV_64F, 1, 0)
abs_sobelx = np.absolute(sobelx)
# 将导数转换为8bit整数
scaled_sobel = np.uint8(255 * abs_sobelx / np.max(abs_sobelx))
sxbinary = np.zeros_like(scaled_sobel)
sxbinary[(scaled_sobel >= sx_thresh[0]) & (scaled_sobel <= sx_thresh[1])] = 1
# 3.对s通道进行阈值处理
s_binary = np.zeros_like(s_channel)
s_binary[(s_channel >= s_thresh[0]) & (s_channel <= s_thresh[1])] = 1
# 4. 将边缘检测的结果和颜色空间阈值的结果合并,并结合l通道的取值,确定车道提取的二值图结果
color_binary = np.dstack((np.zeros_like(sxbinary), sxbinary, s_binary))
return color_binary
def draw_images(img, undistorted, title, cmap):
f, (ax1, ax2) = plt.subplots(1, 2, figsize=(24, 9))
f.tight_layout()
ax1.imshow(img)
ax1.set_title('Original Image', fontsize=50)
if cmap is not None:
ax2.imshow(undistorted, cmap=cmap)
else:
ax2.imshow(undistorted)
ax2.set_title(title, fontsize=50)
plt.subplots_adjust(left=0., right=1, top=0.9, bottom=0.)
plt.show()
if __name__ == '__main__':
image = mpimg.imread('./img.png')
pipeline_img = pipeline(image)
draw_images(image, pipeline_img, 'Pipeline Result', None)
代码运行结果:
总结:
-
颜色空间:
HLS:色相,饱和度,明亮程度
-
车道线提取
颜色空间转换 → 边缘检测 → 颜色阈值 → 合并得到检测结果。
注:NumPy 1.20.0 后的版本 弃用了 np.float,需要改为 np.float64
https://numpy.org/devdocs/release/1.20.0-notes.html#deprecations
| 弃用的名称 | 相同 | NumPy标量类型名称 |
|---|---|---|
| numpy.bool | bool | numpy.bool_ |
| numpy.int | int | numpy.int_(默认)numpy.int64,或numpy.int32 |
| numpy.float | float | numpy.float64,numpy.float_,numpy.double |
| numpy.complex | complex | numpy.complex128,numpy.complex_,numpy.cdouble |
| numpy.object | object | numpy.object_ |
| numpy.str | str | numpy.str_ |
| numpy.long | int | numpy.int_,numpy.longlong |
| numpy.unicode | str | numpy.unicode_ |
以上是关于OpenCV 车道线提取的主要内容,如果未能解决你的问题,请参考以下文章