九轴姿态传感器系列之——史话
Posted 宋宝华
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了九轴姿态传感器系列之——史话相关的知识,希望对你有一定的参考价值。
作者简介
范旭阳 曾在全球第六大开源硬件公司工作,精通多种传感器及算法,产品线研发经理。负责电路设计,软件及算法设计。后从事机器人电路设计,系统软件及室内算法设计。现在AI算法公司担任产品线负责人,负责产品设计、技术研发、项目落地及市场推广等工作。
研究一种新知识,如果对相关知识的历史和发展有一些了解的话,会更加有利于我们对这种知识的掌握,也便于让我们对于整个知识体系结构有个规划。
本章就我们就回溯过去,看看人类对于姿态认知的科学技术是如何演变至今的。
在了解九轴姿态传感器之前,你可能或多或少听过三轴、六轴、九轴这样的词。注意这里的三轴和三自由度不一样,有很多人第一次接错总会把这个概念搞混。
玩过机械手的同学对自由度这个概念应该比较了解。机械臂上每多一个转轴就会多一个自由度。
拿人类的手臂来举例子,当我们只有上臂(肩膀到肘关节的部分)的时候,上臂便可以绕着肩膀前后旋转,这就是一自由度;
此时装上下臂(肘关节到腕关节的部分),这时手臂就在之前绕肩关节转动的基础上又做到可以绕肘关节的精准旋转,这就是二自由度;
如果再加上手掌,那么现在也能绕腕关节活动了,这就是我们人类的手。我们便可以用它轻易定位到我们想拿东西的位置,人类的手便是三自由度。
但是本书中要着重讨论的三轴和这些却完全不一样。本书的三轴、六轴和九轴其实是指陀螺仪,加速度计和磁力计。这里每三个轴作为一次递增就是指每个轴数据的X,Y,Z三个坐标轴。
现实生活中单方面所说的三轴其实是可以指加速度计也可以指陀螺仪的,而六轴则主要是指代加速度计和陀螺仪的合称。因为以前的姿态传感器并没有磁力计的传感器集成在其中,所以并没有把磁力计纳入在内。
不过现在的磁力计的都集成在姿态传感器内部了,所以合称为九轴传感器。
本书就是以MPU9250九轴传感器为例,给大家掰开揉碎的讲解九轴传感器的到底是怎么设计使用的,这样大家就会使用目前市面上所有的姿态传感器了。
某些搞飞控的人还喜欢叫自己的飞控板为十轴,那是因为他们把气压传感器也算在了里面(气压计主要是测量飞行高度的,因为只有一项数据所以认为是单轴)。
古人对姿态这个的研究可谓是费尽心机,生活中处处都体现了其中的奥妙。从日晷,到沙漏甚至是榫卯,还有儿时玩的九连环等,或多或少的都用到了和姿态设计有关的设计。
这里我给大家介绍个最能体现古人对姿态设计之精妙的一个玩物--被中香炉。
被中香炉顾名思义就是一种香炉。被中的意思是说这种香炉是放在被子里的。那你可能会问,被子里放香炉难道不会把灰撒的到处都是吗?
其实这种香炉中间用来点香的是一个特制的平台,它四周圆形包裹。无论你怎么转动这个容器,怎么滚动它,它内部燃香的平台永远是朝上的。古代的中国人经常用这个来驱蚊除臭,其实还可以拿来暖被窝。
其最早的记载被发现在《西京杂记》中:“长安巧工丁缓者……又作卧褥香炉,一名被中香炉,本出房风,其法后绝,至缓始更为之。为机环转运四周,而炉体常平,可置之被褥,故以为名。”
这段话是说,汉武帝时,京城长安有位叫丁缓(公元前140~前80)的能工巧匠,他制成了当时已经失传的被中香炉。在香炉中贮存着香料,点燃以后,放在被褥之中,随意滚动,香炉可以始终保持水平状态,不会倾翻,所以得名叫被中香炉。此处说的是已经失传的被中香炉,说明发明这个容器的人还要比这还要早的多。
如图1-1所示,这个就是被中香炉。
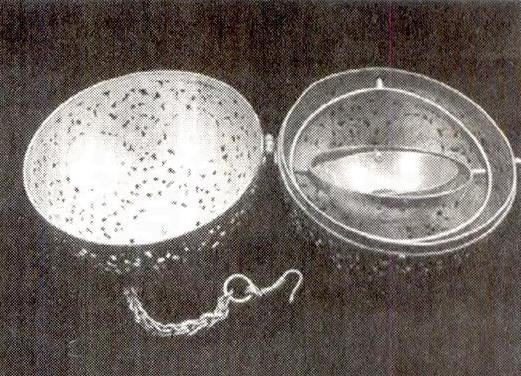
图1-1 被中香炉
分析原理其实这个结构有没有大家可以参考如下图1-2结构的陀螺仪。
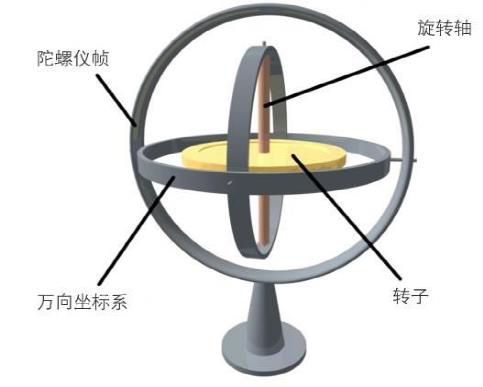
图1-2 陀螺仪
如图1-2所示,每个个体圆环支架之间相互垂直,利用支架结构使其各控制一个方向(XYz轴),无论如何旋转都可以使内部的转子(相当于被中香炉放香料的地方)保持正面向上,再加上外面的球形的保护措施。所以无论这个香炉怎么转动都不会把最内部的燃香洒出。
这种结构后来被推广到了欧洲。1500年意大利科学家达·芬奇和卡丹(1501-1576)都做了类似万象支架的相关设计。万象支架就好比我们现在看书用的灯具,当你调节灯的方向的时候,就相当于对每个轴进行改变。
类似的应用还有焊台的放大镜架子,唱歌歌手的立式话筒架子,工厂里面的机械手也是类似原理。
万象支架如图1-3所示,如果在每个关节做个电机控制阀,那么这个支架就是四自由度,你能数出来吗?

图1-3 现代支架
那为什么陀螺仪具有这样“不倒”的特性?我们可以参考一下陀螺的原理,陀螺具有三大特性:
01


01

定轴性
陀螺在旋转时中心轴的距离是一定保持不变的,也就是上面图1-2所示的旋转轴;


02

进动性
陀螺自身旋转的时候,其实还会沿着另一个轴做旋转运动。如图1-4所示。玩过陀螺的同学肯定知道,当长时间不抽打陀螺的时候就会出现这种绕两个旋转的现象。就像地球不但自转,而且还公转一样;
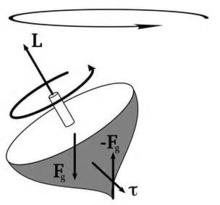
图1-4 陀螺的进动


01

章动性
当陀螺速度由快变慢的时候,我们可以注意到陀螺会做一上一下的点头运动,这就是章动性的体现。
1850年的物理学家莱昂·傅科(J.Foucault)居然就根据陀螺的特性证明出了地球的自转。你知道是怎么做的吗?参阅附录AA1傅科是如何设计地球自转装置的,获取更多细节。(在本书中有很多这种AN的设计,涉及的内容多半是杂谈等,是可以了解也可以不了解的,如果感兴趣的读者可以看看。但和九轴的开发没有什么太大的关系。)
这样,人们根据陀螺的特性才设计出了陀螺仪,如图1-5所示。

图1-5 陀螺仪
来分析一下这个结构。陀螺仪的三个轴(陀螺仪帧、万向坐标系、旋转轴)刚好对应我们之前所说的三轴(X-Y-Z)。中间那个转子和旋转轴对应的就是上面提到陀螺的特性中的两个轴。以转子和旋转轴的交点为原点,建立分别平行于三个坐标的三个轴,这就是高中所学的空间向量XYZ坐标轴了。
没错,计算的时候要用到很多空间向量这方面的知识,所以曾经说学数学没用的同学可要打脸喽。
在大航海时代,陀螺仪首先被利用在航海技术上,船长根据陀螺仪来判定船只运行的倾斜度以便做出相应判断,比如浪高或者浪的强度和方向等。
再后来有了飞机便开始在航空领域上广泛使用。因为飞机在空中,是无法像地面一样轻松靠肉眼来辨认方向和飞机是否水平飞行的,高空的云层和天际线混为一色很容易让人眼晕,特别是在海上开飞机的情况下。直接通过肉眼判断危险性太高,所以陀螺仪迅速得到了应用,成为飞行仪表的核心。
没体验过的同学可以去玩玩模拟飞行类型的游戏,然后把屏幕下方的水平仪表盘挡住,然后就知道没有陀螺仪辅助是什么感觉了。(此时你不容易判断是知道飞机是前倾了一点儿还是后仰了一点儿,左偏还是右斜,就没法保持绝对的水平。)
到了二战,各个国家的科学家开始拼命研究制造新式武器。其中德国研发了一种飞弹可以直接炸到英国本土,这就是今天导弹的雏形。

图1-6 导弹战车
但是德国离英国那么远的距离如何才能做到精准打击而不至于打偏呢?于是德国人研究出来了惯性制导系统。
惯性制导系统主要就是通过陀螺仪来确定方向和角速度,通过加速度计来矫正导弹的飞行姿态,并通过计算,算出飞行的姿态和方向,在飞行的时候可以控制导弹的姿态,让导弹能准确的飞到英国伦敦去。
这个方法和现在的火箭飞行的原理也类似,在火箭飞向太空的时候,需要不停地做姿态计算,从而不停地调整航道,让火箭按照计划的航道飞行。不过那时的硬件技术没有那么好,内部的仪器占用了不少空间和重量,所以导弹显得笨重而粗大,不像现在都是微型导弹。
我们平时使用的智能手机里面其实也有陀螺仪传感器。注意了,可不是里面真有个陀螺在那里在旋转跳跃闭着眼。随着科技的进步,现在的传感器早已经脱离了以前那种粗大笨重的结构。
就拿陀螺仪为例子,现在都是激光陀螺仪,光纤陀螺仪和微机电陀螺仪等,虽说他们名字都叫陀螺仪,但是原理和以前的陀螺仪已经是两码事了,他们的体积和精密程度也不可同日而语了。

图1-7 光纤陀螺仪
光纤陀螺仪利用的是萨格纳克(Sagnac)效应。(光传播时与光路的长度半径有关,而与介质和相移无关)利用光传播的特性,通过测量光程差计算出旋转的角速度,起到陀螺仪测量角速度的作用,从而达到陀螺仪的作用。

图1-8 激光陀螺仪
激光陀螺仪其实也是通过算光程差来计算角速度,从而替代以前的陀螺仪测算方案。

图1-9 微机电陀螺仪
微机电陀螺仪是利用物理学中的科里奥利力(对旋转体系中进行直线运动的质点由于惯性相对于旋转体系产生的直线运动的偏移的一种描述。科里奥利力来自于物体运动所具有的惯性。但这种力实际上是不存在的。),在内部产生微小的电容变化,然后通过电容测量,计算出角速度,以替代陀螺仪。
几乎现在大部分的移动终端设备(智能手机、智能手环、VR、AR设备等)里所用的陀螺仪,都是微机电陀螺仪(MEMS)。
而在传感器的开发上,分为模拟型和数字型。也就是说几乎所有的传感器都是把要测量的状态转化为电容,电压或者电感的值来进行测量,所以你只需要读取传感器相应的寄存器值,并做相应的算法计算。有些传感器甚至已经给你算好了值,直接读取就可以使用了。因而开发反而变得简单的多了呢。

图1-10 虚拟现实设备
现随着移动互联网(或物联网)的崛起,导致了移动互联网设备的崛起,从而使得MEMS传感器的成本越来越低,其中涉及越来越多的行业和领域都要用到姿态传感器。
手机就不用说了,当前炙手可热的飞行器,还有各种智能可穿戴设备,比如智能手环、智能手表等。以及现在的VR(虚拟现实技术)、AR(现实增强技术)等。
军用级应用在如在自动驾驶的汽车,自主航行的导弹,轮船,飞机。工厂里面的机械手等。
恐怕没有姿态传感器这个小东西,生活远不如现在便利。但是对姿态传感器的应用的研究和应用上,人类还任重而道远。
(END)
扫描/识别二维码关注"Linux阅码场"
如果您觉得不错,请转发转发转发!
或者随手点个“在看”吧~

欢迎赐稿“Linux阅码场”,投稿请扫码微信联系“小月”,稿费300-500RMB(已经以任何形式,如公众号、博客、网站发表过的文章,请勿投稿):

以上是关于九轴姿态传感器系列之——史话的主要内容,如果未能解决你的问题,请参考以下文章
Beaglebone Black – 连接 GY-91 MPU9250+BMP280 九轴传感器
Beaglebone Black – 连接 GY-91 MPU9250+BMP280 九轴传感器