数字图像处理OpenCV3 扩展模块学习笔记
Posted 与光同程
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了数字图像处理OpenCV3 扩展模块学习笔记相关的知识,希望对你有一定的参考价值。
1. 特征检测方法
有许多用于特征检测和提取的算法,我们将会对其中大部分进行介绍。OpenCV最常使用的特征检测和提取算法有:
Harris:该算法用于检测角点;
SIFT:该算法用于检测斑点;
SURF:该算法用于检测角点;
FAST:该算法用于检测角点;
BRIEF:该算法用于检测斑点;
ORB:该算法代表带方向的FAST算法与具有旋转不变性的BRIEF算法;
通过以下方法进行特征匹配:
暴力(Brute-Force)匹配法;
基于FLANN匹配法;
可以采用单应性进行空间验证。
1.1. 特征定义
那么,究竟什么是特征呢?为什么一副图像的某个特定区域可以作为一个特征,而其他区域不能呢?粗略的讲,特征就是有意义的图像区域,该区域具有独特特征和易于识别性。因此角点及高密度区域都是很好的特征,而大量重复的模式或低密度区域(例如图像中的蓝色天空)则不是很好的特征。边缘可以将图像分为两个区域,因此也可以看做好的特征。斑点是与周围有很大差别的像素区域,也是有意义的特征。
大多数特征检测算法都会涉及图像的角点、边和斑点的识别,也有一些涉及脊向的概念,可以认为脊向是细长物体的对称轴,例如识别图像中的一条路。角点和边都好理解,那什么是斑点呢?斑点通常是指与周围有着颜色和灰度差别的区域。在实际地图中,往往存在着大量这样的斑点,如一颗树是一个斑点,一块草地是一个斑点,一栋房子也可以是一个斑点。由于斑点代表的是一个区域,相比单纯的角点,它的稳定性要好,抗噪声能力要强,所以它在图像配准上扮演了很重要的角色。
由于某些算法在识别和提取某类型特征的时候有较好的效果,所以知道输入图像是什么很重要,这样做有利于选择最合适的OpenCV工具包。
1.2. 角点检测原理
角点在保留图像图形重要特征的同时,可以有效地减少信息的数据量,使其信息的含量很高,有效地提高了计算的速度,有利于图像的可靠匹配,使得实时处理成为可能。它的各种应用,这里我就不再赘述了。
1.2.1. Harris角点检测原理
我们先来看一幅图片,了解一下什么是角点?

上图中E,F中的角我们通常称作角点(corner points),他们具有以下特征:
-
轮廓之间的交点;
-
对于同一场景,即使视角发生变化,通常具备稳定性质的特征;
-
该点附*区域的像素点无论在梯度方向上还是其梯度幅值上有着较大变化;

harris特征角最早在paper A Combined Corner and Edge Detector中被Chris Harris & Mike Stephens提出。
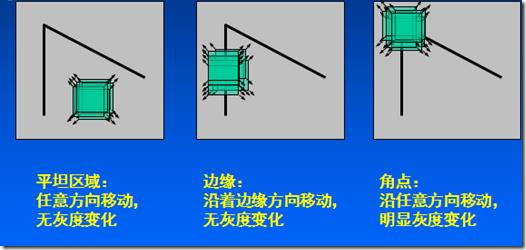
Harris角点检测的基本思想:算法基本思想是使用一个固定窗口在图像上进行任意方向上的滑动,比较滑动前与滑动后两种情况,窗口中的像素灰度变化程度,如果存在任意方向上的滑动,都有着较大灰度变化,那么我们可以认为该窗口中存在角点
1、灰度变化描述
当窗口发生[u,v]
移动时,那么滑动前与滑动后对应的窗口中的像素点灰度变化描述如下:

其中,u,v是窗口在水平,竖直方向的偏移,
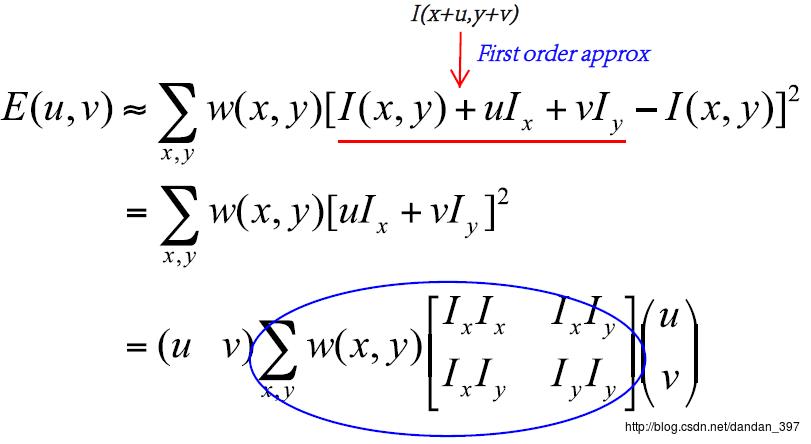
图中蓝线圈出的部分我们称之为结构张量(structure tensor),用M表示。
讲到这里,先明确一点,我们的目的是什么?我们的目的是寻找这样的像素点,它使得我们的u,v无论怎样取值,E(u,v)都是变化比较大的,这个像素点就是我们要找的角点。不难观察,上式近似处理后的E(u,v)是一个二次型,而由下述定理可知,
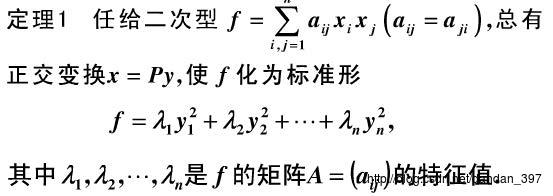

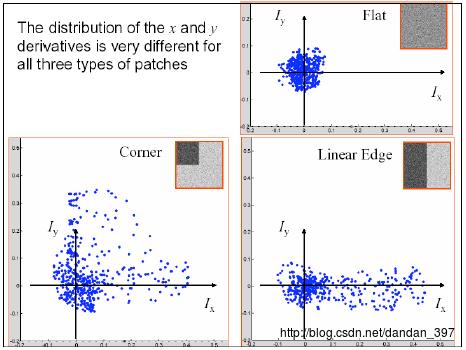
椭圆的长短轴是与结构张量M的两个特征值相对应的量。通过判断的情况我们就可以区分出‘flat’,‘edge’,‘corner’这三种区域,因为最直观的印象:
corner:在水平、竖直两个方向上变化均较大的点,即Ix、Iy都较大;
edge :仅在水平、或者仅在竖直方向有较大的点,即Ix和Iy只有其一较大 ;
flat : 在水平、竖直方向的变化量均较小的点,即Ix、Iy都较小;
而结构张量M是由Ix,Iy构成,它的特征值正好可以反映Ix,Iy的情况,下面我以一种更容易理解的方式来讲述椭圆的物理意义。

当然,大牛们并没有止步于此,这样通过判断两个变量的值来判断角点毕竟不是很方便。于是他们想出了一种更好的方法,对,就是定义角点响应函数R(corner response function),
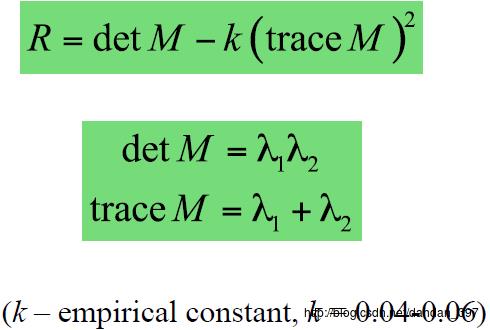

至此,我们就可以通过判断R的值来判断某个点是不是角点了。
角点:R为大数值整数
边缘:R为大数值负数
平坦区:绝对值R是小数值
/*
@param src Input single-channel 8-bit or floating-point image.
@param dst Image to store the Harris detector responses. It has the type CV_32FC1 and the same
size as src .
@param blockSize Neighborhood size (see the details on #cornerEigenValsAndVecs ).
@param ksize Aperture parameter for the Sobel operator.
@param k Harris detector free parameter. See the formula above.
@param borderType Pixel extrapolation method. See #BorderTypes.
*/
CV_EXPORTS_W void cornerHarris( InputArray src, OutputArray dst, int blockSize,
int ksize, double k,
int borderType = BORDER_DEFAULT );
/*
* @Descripttion:
* @version:
* @Author: Yueyang
* @email: 1700695611@qq.com
* @Date: 2021-05-02 23:45:24
* @LastEditors: Yueyang
* @LastEditTime: 2021-05-05 07:27:48
*/
#include <opencv2/opencv.hpp>
using namespace cv;
int main()
{
Mat srcImage,dstImage,normal_dst,norScale;
srcImage=imread("F:/SDK/OpenCV/HiKivision/picture/chessboard.png");
Mat out=srcImage.clone();
cvtColor(srcImage,srcImage,CV_BGR2GRAY);
//imshow("src",srcImage);
dstImage=Mat::zeros(srcImage.size(),CV_32FC1);
cornerHarris(srcImage,dstImage,2,3,0.04,BORDER_DEFAULT);
normalize(dstImage,normal_dst,0,255,NORM_MINMAX,CV_32FC1,Mat());
convertScaleAbs(normal_dst,norScale);
for(int row=0;row<out.rows;row++){
uchar* currentPtr=norScale.ptr(row);
for(int col=0;col<out.cols;col++)
{
int value=(int)*currentPtr;//一般100-200之间 就是上面提到的角点响应函数R
if(value>100)circle(out,Point(col,row),20,Scalar(0,0,255));
currentPtr++;
}
}
imwrite("F:/SDK/OpenCV/HiKivision/picture/out.jpg",out);
imshow("out.jpg",out);
waitKey(0);
return 0;
}
1.2.2. Tomasi角点检测原理
R=min(Y1,Y2);
CV_EXPORTS_W void goodFeaturesToTrack( InputArray image, OutputArray corners,
int maxCorners, double qualityLevel, double minDistance,
InputArray mask = noArray(), int blockSize = 3,
bool useHarrisDetector = false, double k = 0.04 );
下面都不讲原理,看不懂了
1.2.3. SURF特征检测
/*
* @Descripttion:
* @version:
* @Author: Yueyang
* @email: 1700695611@qq.com
* @Date: 2021-05-05 07:51:35
* @LastEditors: Yueyang
* @LastEditTime: 2021-05-05 08:04:08
*/
#include <iostream>
#include <opencv2/opencv.hpp>
#include <opencv2/xfeatures2d.hpp>
using namespace std;
using namespace cv;
using namespace cv::xfeatures2d;
int main()
{
Mat srcImage = imread("F:/SDK/OpenCV/HiKivision/picture/board.jpg");
//判断图像是否读取成功
if (srcImage.empty())
{
cout << "图像加载失败" << endl;
return -1;
}
else
{
cout << "图像加载成功" << endl << endl;
}
namedWindow("原图像",WINDOW_AUTOSIZE);
imshow("原图像",srcImage);
Mat imageMid; //定义滤波后图像
int minHessian = 400; //定义Hessian矩阵阈值特征点检测算子
Ptr<SURF> deteror=SURF::create(minHessian);
vector<KeyPoint> keypoints; //定义KeyPoint类型的矢量容器vector存储检测到的特征点
deteror->detect(srcImage,keypoints); //调用detect检测特征点
//绘制检测到的特征点
Mat dstImage;
drawKeypoints(srcImage, keypoints, dstImage, Scalar::all(-1), DrawMatchesFlags::DEFAULT);
namedWindow("特征点检测",WINDOW_AUTOSIZE);
imshow("特征点检测",dstImage);
waitKey(0);
return 0;
}
1.2.4. SIFT特征点检测

/*
* @Descripttion:
* @version:
* @Author: Yueyang
* @email: 1700695611@qq.com
* @Date: 2021-05-05 08:50:08
* @LastEditors: Yueyang
* @LastEditTime: 2021-05-05 08:57:02
*/
#include "opencv2/opencv.hpp"
#include <opencv2/xfeatures2d.hpp>
#include <vector>
using namespace std;
using namespace cv;
using namespace cv::xfeatures2d;
int main()
{
Mat srcImg1 = imread("F:/SDK/OpenCV/HiKivision/picture/board.jpg");
//Mat srcImg2 = imread("F:/SDK/OpenCV/HiKivision/picture/chessboard.png");
//定义SIFT特征检测类对象
Ptr<SIFT> deteror=SIFT::create();
vector<KeyPoint>keyPoints1;
vector<KeyPoint>keyPoints2;
//特征点检测
deteror->detect(srcImg1, keyPoints1);
//deteror->detect(srcImg2, keyPoints2);
//绘制特征点(关键点)
Mat feature_pic1, feature_pic2;
//drawKeypoints(srcImg2, keyPoints2, feature_pic2, Scalar(0, 0, 255));
drawKeypoints(srcImg1, keyPoints1, feature_pic1, Scalar::all(-1), DrawMatchesFlags::DRAW_RICH_KEYPOINTS);//颜色随机,带有方向
//显示原图
imshow("src1", srcImg1);
//imshow("src2", srcImg2);
//显示结果
imshow("feature1", feature_pic1);
//imshow("feature2", feature_pic2);
waitKey(0);
}
1.2.5. HOG 特征检测
/*
* @Descripttion:
* @version:
* @Author: Yueyang
* @email: 1700695611@qq.com
* @Date: 2021-05-05 09:00:19
* @LastEditors: Yueyang
* @LastEditTime: 2021-05-05 09:09:55
*/
#include <iostream>
#include "opencv2/opencv.hpp"
using namespace cv;
using namespace std;
int main(int argc, char** argv)
{
Mat src = imread("F:/SDK/OpenCV/HiKivision/picture/warker.png");
if (src.empty())
{
cout << "Load image error..." << endl;
return -1;
}
HOGDescriptor hog = HOGDescriptor();
hog.setSVMDetector(hog.getDefaultPeopleDetector());
vector<Rect> foundLocations;
hog.detectMultiScale(src, foundLocations, 0, Size(8, 8), Size(32, 32), 1.05, 2);
Mat result = src.clone();
for (size_t t = 0; t < foundLocations.size(); t++)
rectangle(result, foundLocations[t], Scalar(0, 0, 255), 2, 8, 0);
imwrite("hog.jpg",result);
imshow("HOG SVM Detector Demo", result);
waitKey();
return 0;
}
1.2.6. LBP 特征提取
1.2.6.1. 原始LBP
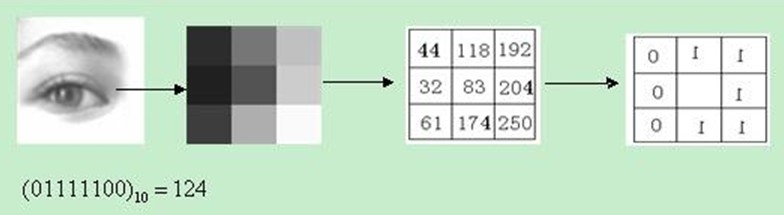
原始LBP是在3*3的窗口内,以窗口中心元素为阈值,比较周围8个像素,若大于中心像素点,则标记为1,否则为0。然后这8个点就可以产生一个8位的二进制数(共有2^8=256种),转换为10进制数后,这个值就用来代替像素中心值。
1.2.6.2. 圆形LBP算子
由于原始LBP只是覆盖了一个固定半径范围内的小区域,不能满足不同尺寸和频率纹理的需要。对此,将3*3领域扩展到任意领域,用圆形领域代替正方形领域。
(1)将检测窗口划分为16*16的小区域(cell)。
(2)对于每个cell中的一个像素,计算得到它的LBP值。
(3)计算每个cell的直方图,即每个LBP值出现的频率,然后归一化。
(4)统计每个cell的直方图,连接成一个向量。
/*
* @Descripttion:
* @version:
* @Author: Yueyang
* @email: 1700695611@qq.com
* @Date: 2021-05-05 07:51:35
* @LastEditors: Yueyang
* @LastEditTime: 2021-05-05 09:59:42
*/
#include <iostream>
#include <opencv2/opencv.hpp>
#include <opencv2/xfeatures2d.hpp>
using namespace std;
using namespace cv;
using namespace cv::xfeatures2d;
int main()
{
Mat srcImage = imread("F:/SDK/OpenCV/HiKivision/picture/board.jpg");
Mat gray_src;
namedWindow("原图像",WINDOW_AUTOSIZE);
imshow("原图像",srcImage);
cvtColor(srcImage,gray_src,CV_BGR2GRAY);
int width=gray_src.cols;
int heights=gray_src.rows;
Mat dst =Mat::zeros(heights-2,width-2,CV_8UC1);
for(int row =1;row<heights-1;row++){
for(int col=1;col<width-1;col++)
{
uchar c=gray_src.at<uchar>(row,col);
uchar code=0;
code|=(gray_src.at<uchar>(row-1,col-1)>c)<<7;
code|=(gray_src.at<uchar>(row-1,col)>c)<<6;
code|=(gray_src.at<uchar>(row-1,col+1)>c)<<5;
code|=(gray_src.at<uchar>(row,col-1)>c)<<4;
code|=(gray_src.at<uchar>(row,col+1)>c)<<3;
code|=(gray_src.at<uchar>(row+1,col-1)>c)<<2;
code|=(gray_src.at<uchar>(row+1,col)>c)<<1;
code|=(gray_src.at<uchar>(row+1,col+1)>c)<<0;
dst.at<uchar>(row-1,col-1)=code;
}
}
imshow("dst",dst);
waitKey(0);
return 0;
}
1.3. HAAR特征提取
1.3.1. 1.什么是haar特征?
特征 = 某个区域的像素点经过某种四则运算之后得到的结果。
这个结果可以是一个具体的值也可以是一个向量,矩阵,多维。实际上就是矩阵运算
1.3.2. 2.如何利用特征 区分目标?
阈值判决,如果大于某个阈值,认为是目标。小于某个阈值认为是非目标。
1.3.3. 3.如何得到这个判决?
使用机器学习,我们可以得到这个判决门限
Haar特征的计算原理
这些是在opencv中使用的haar特征。基础类型(5种) 核心(3种)all(6种),这里的14个图片分别对应十四种特征。
如何使用呢?

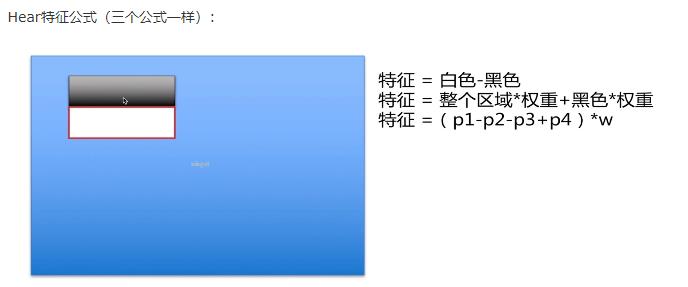
蓝色区域表明我们所得到的图片。黑白矩形框是我们的特征模板。
比如: 我们的模板是一个(10,10)的矩阵,共覆盖了100个像素点。黑白各占50个像素点
将当前模板放在图像上的任意位置上,在这里,用白色区域覆盖的50个像素之和减去黑色区域的50个像素之和得到我们的特征。
推导公式的一样性。
公式二:
这里的整个区域指黑白两色覆盖的整个100个像素。这两个权重是不一样的。
整体的权重值为1 黑色部分权重值为-2
整个区域的像素值 * 权重1 + 黑色部分 * 权重2
= 整个区域 * 1 + 黑色部分 * -2
=(黑 + 白) * 1 + 黑色部分 * -2
= 白色 - 黑色
Haar特征遍历
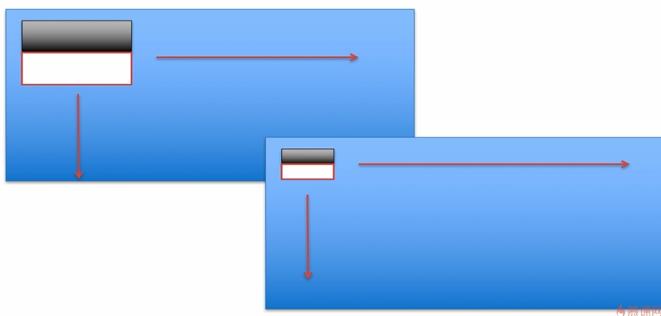
计算整幅图的Haar特征
如果想要计算整幅图的Haar特征,我们就需要遍历,
假设这个haar特征的模板是(10,10)共100个像素。图片的大小是(100,100)
如果想获取这个图片上所有的harr特征。使用当前模板沿着水平和竖直方向进行滑动。从上到下,从左到右进行遍历。
遍历的过程中还要考虑步长问题。这个模板一次滑动几个像素。一次滑动10个像素,就需要9次。加上最开始的第0次。
10个模板。
计算这100个模板才能将haar特征计算完毕。
如果我们的步长设置为5.那么就要滑动20次。400个模板。运算量增加4倍。
其实仅仅这样的一次滑动并没有结束,对于每一个模板还要进行几级缩放,才能完成。
需要三个条件:100100,1010,step=10,模板 1
模板 :缩放,这就需要再次进行遍历
运算量太大 :
计算量 = 14个模版20级缩放(1080/2*720/2) * (100点+ -) = 50-100亿
(50-100)*15 = 1000亿次
积分图
特征:计算矩形方块中的像素
有ABCD四个区域,每个区域都是一个矩形方块。
A区域是左上角那一块小区域,而B区域是包含A区域的长条。
C区域又是包含A的竖直长条。D区域是四个方块之和。
1,2,3,4表明这四个小区域。
进行快速计算:
A 1 B 1 2 C 1 3 D 1 2 3 4
4 = A-B-C+D = 1+1+2+3+4-1-2-1-3 = 4(10*10 变成3次±)
任意一个方框,可由周围的矩形进行相减得到。
问题: 在计算每一个方块之前,需要将图片上所有的像素全部遍历一次。至少一次。
特征=(p1-p2-p3+p4)*w
p1 p2 p3 p4 分别是指某一个特征相邻的abcd的模块指针。
adaboost分类器
haar特征一般会和adaboost一起使用
haar特征 + Adaboost是一个非常常见的组合,在人脸识别上取的非常大成功
Adaboost分类器优点在于前一个基本分类器分出的样本,在下一个分类器中会得到加权。加权后的全体样本再次被用于训练下一个基本分类器。
就是说它可以加强负样本。
例如:我们有 苹果 苹果 苹果 香蕉 找出苹果
第一次训练权值分别为: 0.1 0.1 0.1 0.5
因为香蕉是我们不需要的所以0.5,我们正确的样本系数减小,负样本得到加强。
把出错的样本进行加强权值。再把整个结果送到下一个基本分类器
训练终止条件:
-
for迭代的最大次数 count
-
每次迭代完的检测概率p(p是最小的检测概率,当大于p就终止)
分类器的结构
haar特征计算完之后要进行阈值判决,实际是一个个判决过程。
if(haar> T1) 苹果[第一级分类器];[第二级分类器]and haar>T2
两级都达成了,才会被我们认定为苹果。
两级分类器的阈值分别是t1 和 t2,对于每一级的分类器我们称之为强分类器。
2个强分类器组成。一般有15-20强分类器。 要连续满足15-20个强分类器才能认证为目标。
3个强分类器,每个强分类器会计算出一个独立的特征点。使用每一个独立的特征进行阈值判。
强分类器1 特征x1 阈值t1 强分类器2 特征x2 阈值t2 3同理(阈值是通过训练终止时得到的)
进行判决过程: x1>t1 and x2>t2 and x3>t3
三个判决同时达成,目标-》苹果
三个强分类器只要有一个没通过就会被判定为非苹果。作用:判决。而弱分类器作用:计算强分类器特征x1 x2 x3
每个强分类器由若干个弱分类器组成
1强 对多个弱分类器 对应多个特征节点
弱分类器作用:计算强分类器特征x1 x2 x3
强分类器的输入特征是多个弱分类器输出特征的综合处理。
x2 = sum(y1,y2,y3)
y1 弱分类器特征谁来计算的?
node节点来计算
一个弱分类器最多支持三个haar特征,每个haar特征构成一个node节点
Adaboost分类器计算过程
3个haar -》 3个node
node1 haar1 > node的阈值T1 z1 = a1
node1 haar1 < node的阈值T1 z1 = a2
Z = sum(z1,z2,z3) > 弱分类器T y1 = AA
Z = sum(z1,z2,z3) < 弱分类器T y1 = BB
从node向强分类器
第一层分类器:haar->Node z1 z2 z3 得到的就是z1 z2 z3
第二层分类器:Z>T y1 y2 y3: 弱分类器的计算特征
第三层分类器:x = sum(y1,y2,y3) > T1 obj
训练过程
1.初始化数据 权值分布 苹果 苹果 苹果 香蕉 0.1 0.1 0.1 0.1 (第一次权值都是相等的)
2.遍历阈值 p计算出误差概率,找到最小的minP t
3.计算出G1(x)
4.权值分布 update更新权重分布: 0.2 0.2 0.2 0.7
5.训练终止条件。
1.3.4. 基于Haar特征与级联分类器的人脸检测
/*
* @Descripttion:
* @version:
* @Author: Yueyang
* @email: 1700695611@qq.com
* @Date: 2021-05-05 11:19:53
* @LastEditors: Yueyang
* @LastEditTime: 2021-05-05 11:23:38
*/
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace std;
using namespace cv;
String fileName = "/home/pi/Desktop/WorkSpace/Study/data/haarcascade_frontalface_default.xml";//当前项目文件下的xml文件//opencv自带训练好的人脸识别级联器
CascadeClassifier face_cascade;//定义用来做目标检测的级联分类器的一个类
int main(int argc, char** argv)
{
VideoCapture cap(0);
if (!face_cascade.load(fileName)) //检测级联器是否加载成功
{
printf("could not load face feature data.../n");
return -1;
}
Mat src,gray;
namedWindow("src", WINDOW_AUTOSIZE);
while(true){
cap>>src;
cvtColor(src, gray, COLOR_BGR2GRAY);//转换为灰度图
//直方图均衡化
equalizeHist(gray, gray);//因为积分图像特征基于矩形区域的差,如果直方图是不平衡的,这些差异就有可能由于整体光照或者测试图像的曝光而倾斜,所以这一步非常重要
vector<Rect> faces;
//利用detectMultiScale搜索图像
face_cascade.detectMultiScale(gray, //灰度图像
faces, //vector<Rect&以上是关于数字图像处理OpenCV3 扩展模块学习笔记的主要内容,如果未能解决你的问题,请参考以下文章
《OpenCV3编程入门》学习笔记三:HighGUI图形用户界面