<read papers>Collaborative mapping and navigation for a mobile robot swarm
Posted 殇堼
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了<read papers>Collaborative mapping and navigation for a mobile robot swarm相关的知识,希望对你有一定的参考价值。
网址
https://ieeexplore.ieee.org/abstract/document/7984199
时间
2017年
摘要
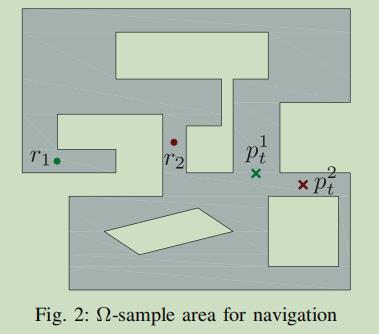
1.本文的主题是将移动机器人在未知环境中的蜂群导航到需要发现的已知目标位置。这个问题模仿了觅食问题。
“起始点和终点位置已知。”
2.本文提出了一种多移动机器人在未知环境下对静止目标协同建图和导航的新方法。
“与主题相似的一句话 ”
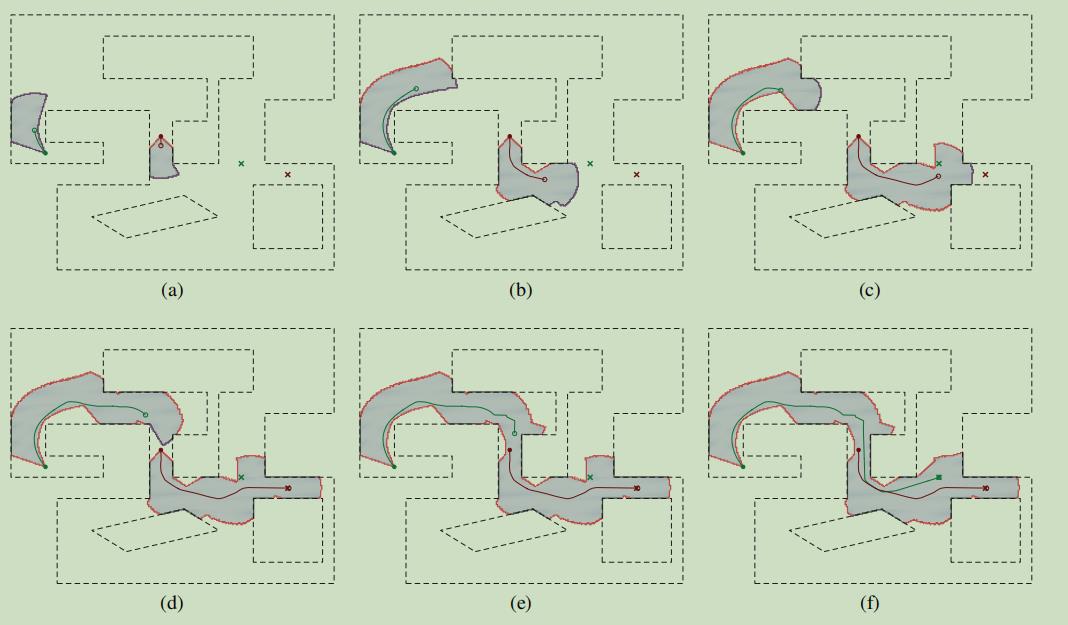
3.每个目标位置都是已知的,一个切换目标函数最初保证单个机器人探索其目标区域,然后安全地引导每个机器人走向其目标。
4.在集体建图过程中,机器人以协作的方式交换地图:如果一个机器人检测到分配给其他机器人的目标时,它会将这些信息传递给相应的机器人,该机器人将其地图与报告机器人的地图连接起来。仿真结果证明了该方案的有效性。
机器人交换了被探索空间的信息,创建了一个集体地图。
方法
主要贡献在于使用切换目标函数,其优化目标是从相同数量的机器人中探索目标位置。每个成员最初都被分配给一个特定的目标。通过最小化成本函数的方法,独立地选择每个机器人的探索边界。如果一个机器人发现了它相应的目标位置,那么该特定机器人的控制律就会切换到一个基于距离的目标函数来达到它。
以上是关于<read papers>Collaborative mapping and navigation for a mobile robot swarm的主要内容,如果未能解决你的问题,请参考以下文章