机器人路径规划基于粒子群之机器人栅格路径规划
Posted Matlab走起
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了机器人路径规划基于粒子群之机器人栅格路径规划相关的知识,希望对你有一定的参考价值。
首先用栅格法描述机器人工作环境,在此基础上,将机器人路径表示为粒子位置的二进制编码,并以路径长度为适应值,产生初始种群后,再对粒子位置和速度进行更新,经过多次迭代,即可获得从起始点到目标点的一条全局最优路径.
clc;
close all
clear
load('data4.mat')
figure(1)%画障碍图
hold on
S=(S_coo(2)-0.5)*num_shange+(S_coo(1)+0.5);%起点对应的编号
E=(E_coo(2)-0.5)*num_shange+(E_coo(1)+0.5);%终点对应的编号
for i=1:num_shange
for j=1:num_shange
if sign(i,j)==1
y=[i-1,i-1,i,i];
x=[j-1,j,j,j-1];
h=fill(x,y,'k');
set(h,'facealpha',0.5)
end
s=(num2str((i-1)*num_shange+j));
%text(j-0.95,i-0.5,s,'fontsize',6)
end
end
axis([0 num_shange 0 num_shange])%限制图的边界
plot(S_coo(2),S_coo(1), 'p','markersize', 10,'markerfacecolor','b','MarkerEdgeColor', 'm')%画起点
plot(E_coo(2),E_coo(1),'o','markersize', 10,'markerfacecolor','g','MarkerEdgeColor', 'c')%画终点
set(gca,'YDir','reverse');%图像翻转
for i=1:num_shange
plot([0 num_shange],[i-1 i-1],'k-');
plot([i i],[0 num_shange],'k-');%画网格线
end
PopSize=20;%种群大小
OldBestFitness=0;%旧的最优适应度值
gen=0;%迭代次数
maxgen =20;%最大迭代次数
c1=0.5;%认知系数
c2=0.7;%社会学习系数
w=0.96;%惯性系数
%%
%初始化路径
w_min=0.5;
w_max=1;
Group=ones(num_point,PopSize); %种群初始化
%最优解
route=Group(:,end)';
index1=find(route==E);
route_lin=route(1:index1);
for i=2:index1
Q1=[mod(route_lin(i-1)-1,num_shange)+1-0.5,ceil(route_lin(i-1)/num_shange)-0.5];
Q2=[mod(route_lin(i)-1,num_shange)+1-0.5,ceil(route_lin(i)/num_shange)-0.5];
plot([Q1(1),Q2(1)],[Q1(2),Q2(2)],'b-.','LineWidth',3);hold on
end
title('粒子群算法-随机路线');
title('粒子群算法-随机路线');
figure(2)
hold on
for i=1:num_shange
for j=1:num_shange
if sign(i,j)==1
y=[i-1,i-1,i,i];
x=[j-1,j,j,j-1];
h=fill(x,y,'k');
set(h,'facealpha',0.5)
end
s=(num2str((i-1)*num_shange+j));
text(j-0.95,i-0.5,s,'fontsize',6)
end
end
axis([0 num_shange 0 num_shange])%限制图的边界
plot(S_coo(2),S_coo(1), 'p','markersize', 10,'markerfacecolor','b','MarkerEdgeColor', 'm')%画起点
plot(E_coo(2),E_coo(1),'o','markersize', 10,'markerfacecolor','g','MarkerEdgeColor', 'c')%画终点
set(gca,'YDir','reverse');%图像翻转
for i=1:num_shange
plot([0 num_shange],[i-1 i-1],'k-');
plot([i i],[0 num_shange],'k-');%画网格线
end
for i=2:index1
Q1=[mod(route_lin(i-1)-1,num_shange)+1-0.5,ceil(route_lin(i-1)/num_shange)-0.5];
Q2=[mod(route_lin(i)-1,num_shange)+1-0.5,ceil(route_lin(i)/num_shange)-0.5];
plot([Q1(1),Q2(1)],[Q1(2),Q2(2)],'b-.','LineWidth',3)
end
%初始化粒子速度(即交换序)
Velocity =zeros(num_point,PopSize);
for i=1:PopSize
Velocity(:,i)=round(rand(1,num_point)'*num_point/10); %round取整
end
%计算每个个体对应路径的距离
for i=1:PopSize
EachPathDis(i) = PathDistance(Group(:,i)',E,num_shange);
end
IndivdualBest=Group;%记录各粒子的个体极值点位置,即个体找到的最短路径
IndivdualBestFitness=EachPathDis;%记录最佳适应度值,即个体找到的最短路径的长度
[GlobalBestFitness,index]=min(EachPathDis);%找出全局最优值和相应序号
%寻优
while gen < maxgen
w=w_max-(w_max-w_min)*gen/maxgen;
%迭代次数递增
gen = gen +1
%更新全局极值点位置,这里指路径
for i=1:PopSize
GlobalBest(:,i) = Group(:,index);
end
for i = 1:PopSize % 更新各路径总距离
EachPathDis(i) = PathDistance(Group(:,i)',E,num_shange);
end
IsChange = EachPathDis<IndivdualBestFitness;%更新后的距离优于更新前的,记录序号
IndivdualBest(:, find(IsChange)) = Group(:, find(IsChange));%更新个体最佳路径
IndivdualBestFitness = IndivdualBestFitness.*( ~IsChange) + EachPathDis.*IsChange;%更新个体最佳路径距离
[GlobalBestFitness, index] = min(IndivdualBestFitness);%更新全局最佳路径,记录相应的序号
if GlobalBestFitness~=OldBestFitness %比较更新前和更新后的适应度值;
OldBestFitness=GlobalBestFitness;%不相等时更新适应度值
best_route=IndivdualBest(:,index)';
end
BestFitness(gen) =GlobalBestFitness;%每一代的最优适应度
end
%最优解
index1=find(best_route==E);
route_lin=best_route(1:index1);
for i=2:index1
Q1=[mod(route_lin(i-1)-1,num_shange)+1-0.5,ceil(route_lin(i-1)/num_shange)-0.5];
Q2=[mod(route_lin(i)-1,num_shange)+1-0.5,ceil(route_lin(i)/num_shange)-0.5];
plot([Q1(1),Q2(1)],[Q1(2),Q2(2)],'r','LineWidth',3)
end
for i=1:PopSize
p_lin=randperm(num_point)';%随机生成1*400不重复的行向量
%% 将起点编号放在首位
index=find(p_lin==S);
lin=p_lin(1);
p_lin(1)=p_lin(index);
p_lin(index)=lin;
Group(:,i)=p_lin;
%%将每个个体进行合理化处理
[Group(:,i),flag]=deal_fun(Group(:,i),num_point,liantong_point,E,num_shange);
while flag==1%如处理不成功,则初始化个体,重新处理
p_lin=randperm(num_point)';
index=find(p_lin==S);
lin=p_lin(1);
p_lin(1)=p_lin(index);
p_lin(index)=lin;
Group(:,i)=p_lin;
[Group(:,i),flag]=deal_fun(Group(:,i),num_point,liantong_point,E,num_shange);
end
end
%最优解
route=Group(:,end)';
index3=find(route==E);
route_lin1=route(1:index3);
for i=2:index3
Q1=[mod(route_lin1(i-1)-1,num_shange)+1-0.5,ceil(route_lin1(i-1)/num_shange)-0.5];
Q2=[mod(route_lin1(i)-1,num_shange)+1-0.5,ceil(route_lin1(i)/num_shange)-0.5];
plot([Q1(1),Q2(1)],[Q1(2),Q2(2)],'c-.','LineWidth',3);hold on
end
for i=1:PopSize
p_lin=randperm(num_point)';%随机生成1*400不重复的行向量
%% 将起点编号放在首位
index=find(p_lin==S);
lin=p_lin(1);
p_lin(1)=p_lin(index);
p_lin(index)=lin;
Group(:,i)=p_lin;
%%将每个个体进行合理化处理
[Group(:,i),flag]=deal_fun(Group(:,i),num_point,liantong_point,E,num_shange);
while flag==1%如处理不成功,则初始化个体,重新处理
p_lin=randperm(num_point)';
index=find(p_lin==S);
lin=p_lin(1);
p_lin(1)=p_lin(index);
p_lin(index)=lin;
Group(:,i)=p_lin;
[Group(:,i),flag]=deal_fun(Group(:,i),num_point,liantong_point,E,num_shange);
end
end
%最优解
route=Group(:,end)';
index2=find(route==E);
route_lin2=route(1:index2);
for i=2:index2
Q1=[mod(route_lin2(i-1)-1,num_shange)+1-0.5,ceil(route_lin2(i-1)/num_shange)-0.5];
Q2=[mod(route_lin2(i)-1,num_shange)+1-0.5,ceil(route_lin2(i)/num_shange)-0.5];
plot([Q1(1),Q2(1)],[Q1(2),Q2(2)],'m-.','LineWidth',3);hold on
end
title('粒子群算法-对比路线');
figure(3)
hold on
for i=1:num_shange
for j=1:num_shange
if sign(i,j)==1
y=[i-1,i-1,i,i];
x=[j-1,j,j,j-1];
h=fill(x,y,'k');
set(h,'facealpha',0.5)
end
s=(num2str((i-1)*num_shange+j));
text(j-0.95,i-0.5,s,'fontsize',6)
end
end
axis([0 num_shange 0 num_shange])%限制图的边界
plot(S_coo(2),S_coo(1), 'p','markersize', 10,'markerfacecolor','b','MarkerEdgeColor', 'm')%画起点
plot(E_coo(2),E_coo(1),'o','markersize', 10,'markerfacecolor','g','MarkerEdgeColor', 'c')%画终点
set(gca,'YDir','reverse');%图像翻转
for i=1:num_shange
plot([0 num_shange],[i-1 i-1],'k-');
plot([i i],[0 num_shange],'k-');%画网格线
end
for i=2:index1
Q1=[mod(route_lin(i-1)-1,num_shange)+1-0.5,ceil(route_lin(i-1)/num_shange)-0.5];
Q2=[mod(route_lin(i)-1,num_shange)+1-0.5,ceil(route_lin(i)/num_shange)-0.5];
plot([Q1(1),Q2(1)],[Q1(2),Q2(2)],'r','LineWidth',3)
end
title('粒子群算法-最优路线');
%进化曲线
figure(4);
plot(BestFitness);
xlabel('迭代次数')
ylabel('适应度值')
grid on;
title('进化曲线');
disp('粒子群算法-最优路线方案:')
disp(num2str(route_lin))
disp(['起点到终点的距离:',num2str(BestFitness(end))]);
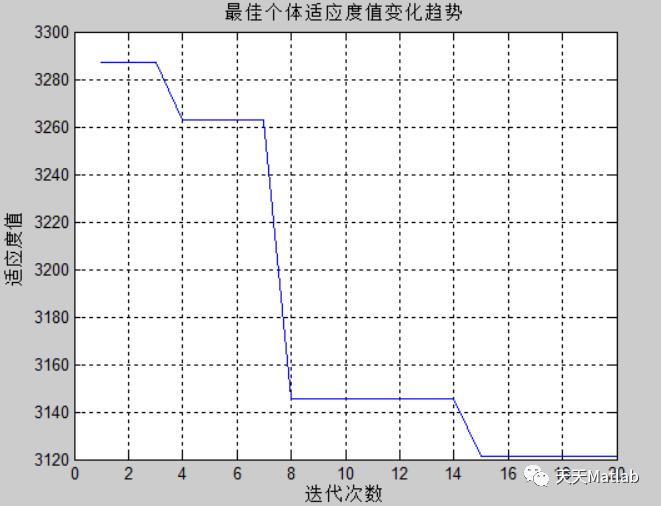
figure(5);
plot(BestFitness*100);
xlabel('迭代次数')
ylabel('适应度值')
grid on;
title('最佳个体适应度值变化趋势');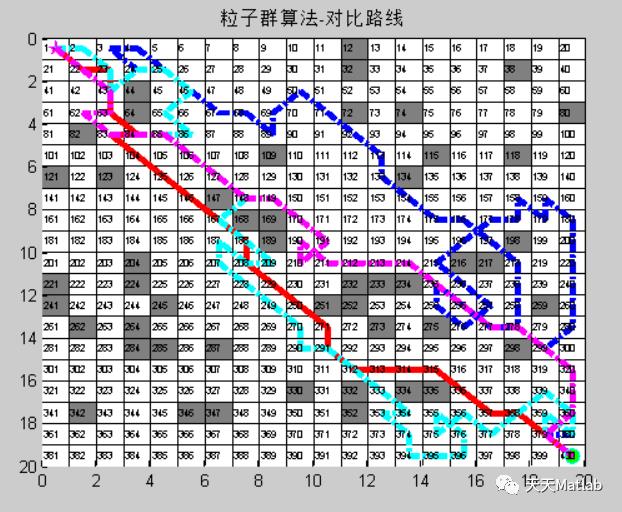
完整代码添加QQ1575304183
以上是关于机器人路径规划基于粒子群之机器人栅格路径规划的主要内容,如果未能解决你的问题,请参考以下文章