流体运动估计光流算法研究
Posted 苏州程序大白
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了流体运动估计光流算法研究相关的知识,希望对你有一定的参考价值。
流体运动估计光流算法研究
大家好!我是苏州程序大白,今天讲讲流体运动估计光流算法研究。请大家多多关注支持我。谢谢!!!
简介:
对流体图像序列进行运动分析一直是流体力学、医学和计算机视觉等领域的重要研究课题。 从图像对中提取的密集精确的速度矢量场能够为许多领域提供有价值的信息,基于光流法的流体运动估计技术因其独特的优势成为一个有前途的方向。 光流法可以获得具有较高分辨率的密集速度矢量场,在小尺度精细结构的测量上有所改进,弥补了基于相关分析法的粒子图像测速技术的不足。 此外,光流方法还可以方便的引入各种物理约束,获得较为符合流体运动特性的运动估计结果。 为了全面反映基于光流法的流体运动估计算法的研究进展,本文在广泛调研相关文献的基础上,对国内外具有代表性的论文进行了系统阐述。 首先介绍了光流法的基本原理,然后将现有算法按照要解决的突出问题进行分类:结合流体力学知识的能量最小化函数,提高对光照变化的鲁棒性,大位移估计和消除异常值。 对每类方法,从问题解决过程的角度予以介绍,分析了各类突出问题中现有算法的特点和局限性。 最后,总结分析了流体运动估计技术当前面临的问题和挑战,并对未来基于光流法的运动估计算法的研究方向和研究重点进行了展望。
定义:
流体运动估计技术在日常生活的众多领域发挥着重要作用,对从流体图像序列中提取的速度场进行分析,有助于更深入地了解复杂的流体运动并提取有用的信息。粒子图像测速( particle image velocimetry,PIV)(Adrian,1991)是一种广泛使用的流体运动估计技术。 其基于两个连续粒子图像之间局部空间性,通过搜索图像对的两个查询窗口之间互相关的最大值,获得查询窗口之间的位移矢量。 这种依赖于互相关函数的PIV 技术虽然能够简单有效地从图像序列间获取速度矢量场,但仍存在许多不足。 首先,其假设查询窗口内的位移矢量保持一致,这使得获取的速度场空间分辨率低,无法测量流场中的小尺度精细结构。 其次,PIV 技术主要用于粒子图像,无法可靠获取标量图像的速度矢量场。 最后,PIV技术缺乏物理解释,对图像序列进行运动估计时,平等地对待各种性质的运动物体。研究发现光流法非常适合流体运动估计( Li等,2015)。 与基于互相关的 PIV 技术相比,光流法可以获取更加密集的速度场,而且可以对标量图像进行运动估计而不仅限于粒子图像。 此外,与 PI技术相比,光流法更能适应各种物理约束。 基于光流法的流体运动技术是对 PIV 技术的良好补充。虽然现有的基于光流法的流体运动估计技术已经广泛用于各种流体测速场景,但仍存在计算耗时鲁棒性不足等问题。 本文从光流法的基本原理入手,根据光流法需要解决的几个关键问题对现有的算法进行分类,并对每一类方法从问题解决的角度予以介绍。
1、光流法的基本
光流本质上是 3 维场景的物体运动投影到 2 维图像平面表现的像素点亮度变化。 光流计算即从图像数据中估计物体的运动。 Horn 和 Schunck(1981)开创性地提出了经典的变分光流估计模型,该模型的目标函数是包含一个数据项和一个平滑项的能量函数的最小化。 数据项主要基于亮度守恒假设,即同一个像素点的亮度(灰度值)在相邻两帧图像内保持不变,即:
I(x + dx,y + dy,t + dt) = I(x,y,t) (1)
式中, I(x,y,t) 表示 t 时刻坐标为 (x,y) 的像素点的亮度(灰度值)。 对式(1)左边进行泰勒展开并整理可得

假设坐标为 (x,y) 处的像素点的速度为 w(x,y) = (u,v)T。 将速度的定义公式
和

,代入式(2),可得

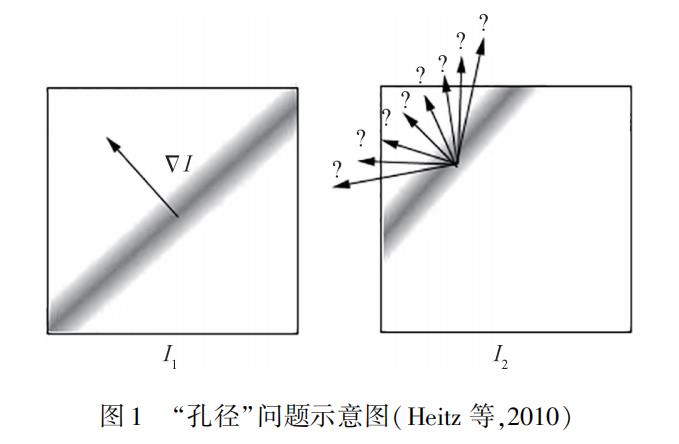
单独使用式(3)估算速度的两个未知分量,即 u和 v ,不能获得唯一解,这称为光流计算的孔径问题(aperture problem),如图 1 ( Heitz 等,2010 ) 所示。为解决该问题,通常采用附加的平滑项 Eregu (u,v) ,执行流场的空间平滑度一致性,具体为:

式中,Δ表示梯度算子。 结合式(3)和式(4)可以获得经典变分光流法的能量最小化函数 E(u,v) ,具
体为:
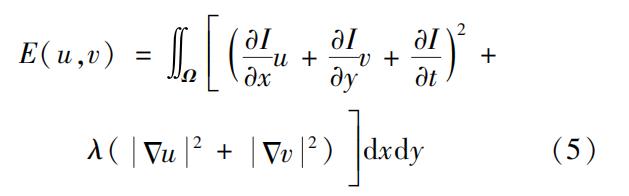
式中, λ 是参数,用于调节平滑项所占的比重。
光流法最初是在计算机视觉领域提出的,主要用于从图像序列中估计明显的刚性运动,由于其能够从图像对中获取密集的速度矢量场,成为实验流体力学、医学和气象学等领域的研究热点,广泛用于各种流体运动场景。
2、基于光流法的流体运动估计技术
自经典光流模型提出以来,不断进行研究和改进,以提升算法的精度、鲁棒性和时空分辨率等性能,更好地对流体图像序列进行运动估计。 本文按照光流法需要解决的几个关键问题,将现有算法分为结合流体力学知识的能量最小化函数、提高对光照变化的鲁棒性、大位移估计和消除异常值等 4 类方法。
2. 1 结合流体力学知识的能量最小化函数
Wildes 等人(2000)和 Corpetti 等人(2002)尝试将经典光流模型应用于云运动估计,但是结果表明该模型不能准确地估计云的运动。 经典的光流模型主要适用于估计各种自然场景中的刚性运动,其依赖的亮度约束方程不是通过任何物理原理推导而来,缺乏物理解释,难以捕获具有复杂运动模式的流体运动。 为了克服该模型对流体图像序列的局限性,对其进行了改进和扩展。
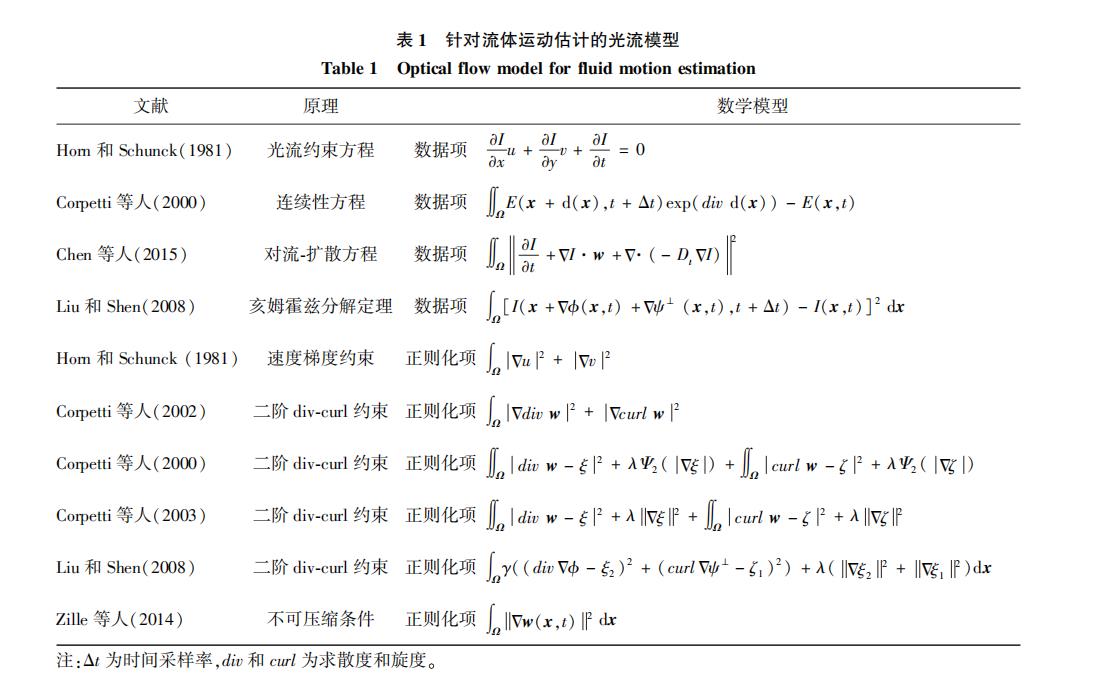
通过引入基于质量和动量守恒定理推导的连续性方程,设计了一种专用于捕获流体运动的光流模型(Corpetti 等,2000,2002,2003,2006),采用连续性方程作为数据项,并利用二阶散度—旋度(div-curl)正则化替换经典模型中的一阶正则化。 基于物理的流动连续性方程能够将图像数据与流体流动行为联系起来。 一阶正则化用作平滑项会因过度平滑而导致估计的矢量场具有低散度和旋度,而二阶 div-curl正则化能够有效恢复流体运动的散度和旋度结构,更适用于复杂的流体运动估计。 但是由于涉及高阶微分,该算法实现起来比较困难,而且较高的阶数还会导致计算成本增加。 为解决该问题,在正则化项中添加了两个辅助变量 ξ 和 ζ,作为真实散度和旋度的近似值,以减少模型的高阶行为。 Liu 和 Shen(2008)根据 3 维物体空间中的传输方程或连续性方程在 2 维图像平面上的投影,推导出针对各种流体可视化的投影运动方程。 并将此投影运动方程作为光流约束,进一步给出了基于物理的光流方程,正式建立了光流与流体流动之间的数学联系。 需要指出,Corpetti 等人(2002)使用的 div-curl 正则化不是基于流体力学原理推导出来的;Liu 等人(2008) 采用投影到 2 维图像平面上的 navier-stokes 方程为光流计算提供了基于物理的约束,得到的非线性约束非常复杂。 Yang 和 Johnson(2017)利用 Liu 等人(2008)得到的基于物理的光流方程,提出一种散度补偿光流法,并成功应用于 X 射线图像的流场估计。上述方法求解的速度场都是基于像素尺度的,对于刚体和简单流体运动而言,在该尺度下求解造成的信息缺失可以忽略不计。 但是对于复杂的流体运动如湍流,其中存在的亚像素小尺度涡结构无法在像素点上得以体现。 Cassisa 等人(2011) 和 Zille等人(2014)引入大涡模拟的相关概念,提出一种亚网格传输方程模型( sub-grid transport equation) ,在亚像素尺度上考虑了湍流的小尺度速度分量,相比之前的光流模型,能够精确估计复杂的湍流运动,但是亚网格传输方程涉及的湍流扩散系数是根据经验选取的。 Chen 等人(2015) 在此基础上,应用物理空间亚网格模型系统地计算嵌入光流约束方程中的小尺 度 扩 散 项,得 到 了 改 善 的 估 计结果。从以上研究可知,将湍流模型与变分光流模型结合起来估计复杂的湍流运动是很有前景的研究方向,但是这些方法都高度依赖一个用于在数据模型中对选取的湍流模型进行加权的正则化参数,该参数没有直接的物理解释且在实际应用中很难确定。Cai 等人(2018)为采用不同策略的湍流运动估计,推导了一种新颖的基于位置不确定性的光流方程。首先根据 Mémin(2014)的推导,将流体运动的欧拉速度分解为一个大尺度分量和一个称为位置不确定性的小尺度湍流分量。 然后结合雷诺兹运输定理的随机表达式得出随机光流约束方程,该方程包含了小尺度分量的影响,涉及的参数都可以进行明确的估计而无需进行烦琐的调参。对流体速度场进行分解有助于理解复杂的流体运动。 Kohlberger 等人(2003)基于亥姆霍兹分解定理提供了一种对图像序列中的非刚性结构进行稠密运动估计的方法,将速度场分为一个无散度分量和一个无旋度分量之和,使用速度势和流函数对这两个分量进行明确表示,并将该表示应用于亮度恒定约束方程 ( brightness constancy constraint equation,BCCE)和二阶正则化项。 该方法可以直接估计速度势和流函数,利用这两个函数可以获得速度场的更多信息。 首先,计算它们的梯度,得到无散度分量和无旋度分量。 其次,对它们进行拉普拉斯运算,获得速度场的涡度和散度。 最后,它们的极值提供了感兴趣的奇异点的位置,例如源、汇和漩涡。利用 Kohlberger 等人(2003)提出的方法估计密集运动矢量,其解属于高维空间,但在跟踪等应用中需要提供低维解。 为了获得低维解,提出了一种基于矢量场的亥姆霍兹分解的低维流体运动估计方法(Cuzol 和 Mémin,2005;Cuzol 等,2007)。 在该方法中,无散度分量和无旋度分量采用离散化的涡度和散度图通过正则化狄拉克测度进行近似,同时采用引入连续性方程的数据项和二阶 div-curl 正则化的平滑项。 该方法在考虑较少数量的粒子时,可以实现更高的精度和更快的计算。 但是,如果大量增加速度向量的低维表示的粒子数量,将导致比其他密集运动估计方法更高的计算成本。考虑流场的时间相关性,有助于将准确帧的信息传播到后续帧。 Ruhnau 等人(2007)提出一种基于涡度传输方程的流体运动估计方法,使用前一帧的传输涡度场作为当前帧的约束,并考虑了流场间的时间相关性。 但信息只能沿一个方向传输,在某些情况下,当前一帧估计不准确时可能导致后续帧的估 计 结 果 更 差。 为 了 解 决 该 问 题, Zuo 和 Qi(2017)提出一种新颖的时空光学流模型,同时估计流体序列所有帧的速度场。 使用该模型可以将准确性估计从具有高对应性的帧传播到相邻帧。大多数光流法采用全局光流公式估计流场,这种使用全局能量函数约束的方法在流体速度场的不连续边缘上也会进行平滑操作,从而无法保留非均匀流场的空间不连续性。 Lu 等人(2019)提出一种基于场 分 割 的 变 分 光 流 方 法 ( field-segmentationbased variational optical flow,FS-VOF),用于保留非均匀流场的空间不连续特性。 该方法根据流体的速度分布对粒子图像进行分割,将不连续的流场划分为多个连续的速度场。 随后,根据速度在每个分割区域中连续变化并且在区域边界处保留速度场的不连续结构的假设建立平滑约束条件。 该方法使用的数据项是基于分割区域的,并且由基于物理的光流方程所推导。经典的光流方法不能很好地适应具有复杂流动的流体图像,因此使用考虑流体流动特性的物理约束对光流方法的目标函数进行改善,主要是对数据项和正则化项进行改进,以提高流体运动估计的精度。 针对流体运动估计的光流模型如表 1 所示,表中 Dt 表示湍流扩散系数, ϕ 表示速度势函数, ψ 表示流函数, Ψ1 、 Ψ2 、 γ 是比例系数。
2. 2 提高对光照变化的鲁棒性
- 经典的变分光流模型主要依据亮度恒定假设,但是这种亮度恒定约束太过于理想化而无法满足实际情况。 传统的 HS(Horn Schunck) 光流法对光照变化十分敏感,光流的鲁棒性很差。为了提高对光照变化的鲁棒性,提出了大量基于连续性方程的流体运动估计算法(Uras 等,1988;Zhou 等,2000;Nakajima 等,2003;Arnaud 等,2006),将连续性方程应用于光流模型,在亮度变化不的情况下可以提高流体运动估计的精度,但是在光照变化剧烈的情况下无法进行准确的运动估计。计算机视觉领域在经典变分光流法的基础上也进行了诸多改进,以期提高对光照变化的鲁棒性,这些改进大致分为 4 类。第 1 类方法是使用高阶恒定性假设扩展依赖亮度恒定假设的数据项。 Brox 等人(2004) 使用梯度守恒假设对亮度恒定假设进行扩展,Papenberg 等人(2006)在此基础上引入 Hessian 恒定假设和 Lapla-cian 恒定假设。 这种方法仅在两帧图像之间光照变化不大时才可以有效提高对光照变化的鲁棒性。 此外梯度守恒假设和 Hessian 恒定假设具有方向信息,因为对象旋转时可能导致方向改变,因此该方法仅在估计平移运动和发散运动时具有积极影响,而不适用于旋转运动。 图像序列中任意像素点的空间梯度可以分解为其范数和方向两部分。 当方向信息旋转改变时,梯度的范数保持不变。 Papenberg 等人(2006)提出将梯度范数作为另一恒定性假设。 但这些假设同样不适用光照变化较大的情况,而且对噪声十分敏感。 Zhong 等人(2017)利用基于梯度不变假设的数据项及一个一阶散度和涡度构成的平滑项提出一种新的 2 维光流算法,不仅可以在光照变化情况下获得较为精确的估计结果,而且在保持运动场的小散度和涡度结构以及减少异常值方面也更具有优势。第 2 类方法是提取图像中的光照不变特征用于数据项中。 Zabih 和 Woodfill(1994) 提出了两种非局部参数变换:rank 变换和 census 变换。 它们描述了一个签名向量 s ,该签名向量 s 对局部图像块内中心参考像素与其周围像素的灰度值关系进行编码。 census 变换对参考像素与邻域像素间的灰度值大小进行比较,如果小于邻域像素的灰度值则标记为 0,反之为 1,然后将其连接成一串二进制字符串。Müller 等人(2011) 将 census 变换应用于变分光流计算方案,并提出了一种新的光流估计方法,利用两个 census 变换签名间的汉明距离取代亮度守恒约束形成新的数据项。 因为 census 变换反映的是中心像素与周围像素之间灰度的相对大小关系,因此在单调变化的光照条件下具有不变性。 但是,census 变换对光照变化的不变性在精度上有所妥协,光流估计的结果不如其他方法精确,并且存在很多缺点,例如对非单调光照变化和噪声十分敏感,丢失了来自邻域的大部分信息,对局部图像块信息描述不完整,无法区分附近的暗区和亮区以及 census 变换的不变性只是针对平移运动,而对旋转或缩放变换则不具有不变性等。 针对以上问题, Ranftl 等人(2014)通过对具有不同半径的径向模板进行采样,提出了一种尺度不变的 census 描述符,实现了在缩放变换下的不变性。 该方法通过使用径向采样而不是基于窗口的采样策略,定义了普查变换的一种新变体,可以实现多尺度重采样,从而实现在缩放变换时的不变性。 rank 变换在单调变化的光照条件下也具有光照不变性,它的签名向量记录了灰度值小于中心参考像素的邻域像素的个数。 Yuan 等人(2014)将 rank 变换嵌入到基于 TV-L1 ( total variational with L1 norm,TV-L1)模型的数据项中,提出了一种新的对单调变化的光照具有鲁棒性的光流估计算法。 但是与 census 变换一样,rank 变换也不可避免地丢弃了大量的局部图像信息。 为了在保持不变性的同时尽可能多地保留局部图像信息,Demetz 等人(2013)提出了一种新的 rank 变换———CRT(complete rank transform)。 CRT 结合编码完整强度顺序的思想对 rank 变换进行扩展,它对全部像素的秩进行编码而不再是仅对参考像素的秩进行编码。 census 变换对不同的局部图像块可能生成相同的签名向量,无法处理中心像素饱和的图像块,Rashwan 等人(2013)提出了一种对光照变化具有高度不变性的局部纹理描述子方向梯度直方图( histogram of
oriented gradients,HOG)。 HOG 可以通过产生不同的描述符来检测强度区域的变化。 而且,HOG 编码可以在一定程度上抑制平移和旋转带来的影响。 不过因为生成 HOG 描述符时依然依赖局部梯度的大小,因此对噪声十分敏感。 Mohamed 等人(2014)通过修改使用二进制特征描述符(8 位描述符)作为匹配成本的局部定向模式( Jabid 等,2010),提出了一种对光照变化更加鲁棒的方法,仅对邻域中的方向信息进行编码,而不是强度值,比其他使用强度值的描述符对光照和噪声更鲁棒,但是需要非常高的计算时间。 Ali 等人(2016)提出一种使用邻域描述符(normalized neighborhood descriptors,NND)作为匹配成本的方法。 邻域描述符基于每个像素相对于其相邻像素的自相似性度量,这种成本使得关于一个像素的大部分信息得以保留。 该方法相对 Mohamed等人(2014)提出的 MLDP(modified local directionalpattern)方法,计算时间大幅减少,但精度较低,其主要贡献在于实现了对鲁棒性、准确性和计算速度的折衷。 Xu 等人(2017)介绍了一种称为亮度分布矩阵( brightness distribution matrix,BDM) 的新型数据结构,对剧烈变化的光照具有鲁棒性。 此外,由于基于 BDM 的运动估计方法在处理复杂的流体情况时需要进行大量计算,因此为了减少整体运动估计的时间, 又 基 于 图 形 处 理 单 元 ( graphics processingunit,GPU)开发了该方法的并行版本。第 3 类方法是采用结构!纹理分解方法进行预处理"将图像分解为与图像中主要大对象对应的结构部分和包含精细比例细节的纹理部分"然后使用纹理部分代替原始灰度图像进行后续光流计算。这种方法期望光照变化导致的阴影和亮度变化等影响主要表现在结构部分"而纹理部分则几乎不会受到影响。Weder等人提出一种基于全变分正则化(Rudin-Osher-Fatemi,ROF)模型的结构!纹理分解方法对图像进行分解"使计算精度显著提高"但是只适用于光照变化不大的情况而且计算成本很高。使用纹理信息进行光流计算在非单调且变化不大的光照下能够提高光流估计精度"以及在单调且剧烈变化的光照条件下census描述符,实现了在缩放变换下的不变性。 该方法通过使用径向采样而不是基于窗口的采样策略,定义了普查变换的一种新变体,可以实现多尺度重采样,从而实现在缩放变换时的不变性。Rank变换在单调变化的光照条件下也具有光照不变性,它的签名向量记录了灰度值小于中心参考像素的邻域像素的个数。。 Yuan 等人(2014)将 rank 变换嵌入到基于 TV-L1 ( total variational with L1 norm,TV-L1)模型的数据项中,提出了一种新的对单调变化的光照具有鲁棒性的光流估计算法。 但是与 census 变换一样,rank 变换也不可避
免地丢弃了大量的局部图像信息。 为了在保持不变性的同时尽可能多地保留局部图像信息,Demetz 等
人(2013)提出了一种新的 rank 变换———CRT(complete rank transform)。 CRT 结合编码完整强度顺序的思想对 rank 变换进行扩展,它对全部像素的秩进行编码而不再是仅对参考像素的秩进行编码。 census 变换对不同的局部图像块可能生成相同的签名向量,无法处理中心像素饱和的图像块,Rashwan 等人(2013)提出了一种对光照变化具有高度不变性的局部纹理描述子方向梯度直方图( histogram of
oriented gradients,HOG)。 HOG 可以通过产生不同的描述符来检测强度区域的变化。 而且,HOG 编码
可以在一定程度上抑制平移和旋转带来的影响。 不过因为生成 HOG 描述符时依然依赖局部梯度的大小,因此对噪声十分敏感。 Mohamed 等人(2014)通过修改使用二进制特征描述符(8 位描述符)作为匹配成本的局部定向模式( Jabid 等,2010),提出了一种对光照变化更加鲁棒的方法,仅对邻域中的方向信息进行编码,而不是强度值,比其他使用强度值的描述符对光照和噪声更鲁棒,但是需要非常高的计算时间。 Ali 等人(2016)提出一种使用邻域描述符(normalized neighborhood descriptors,NND)作为匹配成本的方法。 邻域描述符基于每个像素相对于其相邻像素的自相似性度量,这种成本使得关于一个像素的大部分信息得以保留。 该方法相对 Mohamed等人(2014)提出的 MLDP(modified local directionalpattern)方法,计算时间大幅减少,但精度较低,其主要贡献在于实现了对鲁棒性、准确性和计算速度的折衷。 Xu 等人(2017)介绍了一种称为亮度分布矩阵( brightness distribution matrix,BDM) 的新型数据结构,对剧烈变化的光照具有鲁棒性。 此外,由于基于 BDM 的运动估计方法在处理复杂的流体情况时需要进行大量计算,因此为了减少整体运动估计的时间, 又 基 于 图 形 处 理 单 元 ( graphics processingunit,GPU)开发了该方法的并行版本。第 ! 类方法是采用结构!纹理分解方法进行预处理"将图像分解为与图像中主要大对象对应的结构部分和包含精细比例细节的纹理部分"然后使用纹理部分代替原始灰度图像进行后续光流计算# 这种方法期望光照变化导致的阴影和亮度变化等影响主要表现在结构部分"而纹理部分则几乎不会受到影响’’(等人提出了一种基于全变分正则化模型的结构!纹理分解方法对图像进行分解"使计算精度显著提高"但是只适用于光照变化不大的情况"而且计算成本很高# 袁建英等人考虑到使用纹理信息进行光流计算在非单调且变化不大的光照下能够提高光流估计精度"以及在单调且剧烈变化的光照条件下 9#.1-1变换仍然具有恒定特性"提出了一种能适应不同光照变化的结合结构纹理分解和 9#.1-1变换的光流估计方法"利用纹理信息和9#.1-1变换构建新的数据项"并根据光照变化情况自适应调整两者之间的权重"实现在不同光照条件下自适应选择合适的数据项#第 : 类方法是建立光照变化的数学模型.引入了一种线性化光照模型"将光照导致的
亮度变化表示为乘法因素和加法因素的共同影响"引入了 这两个根据时空变化的函数作为参数"得到一个考虑亮度变化的通用模型"具体为:

该模型假设在时刻 ′ ' ′$图像的亮度可以由时刻 $图像的亮度和一系列的参数线性化表示# 这种线性化光照模型相比亮度恒定约束要更松弛"允许不太精确的匹配"提高了计算结果的精度"但是这种方法在运动不连续的情况下没有效果在此基础上考虑了更多与光照有关的因素"将两个连续图像中的像素亮度通过运动参数 ) 和 *以及参数 联系起来# 该方法在运动不连续和光照变化时都可以获得良好的估计"但是计算结果的精度与参数的选择有关"而且由于公式中包含过多的参数"使得优化过程变得十分复杂。
2.3大位移估计
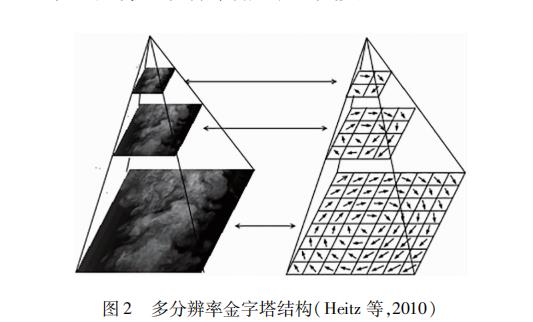
光流法使用的变分公式仅限于小位移估计而无法捕捉大的运动"为了克服这个问题"很多研究者采用多分辨率金字塔方案来处理大位移"从而提高运动估计 的 精 度 并 降 低 计 算 的 复 杂 度 $ BF7*. 和GF3#H"+((@&I2?- 等"&’’’&J#*6H等"&’+’%# 如图 &$J#6H等"&’+’%所示"该方案主要通过一系列不同尺度的图像序列来找到运动矢量# 将当前模型获得的估计值线性化"并嵌入到通过对原图像序列进行连续低通滤波和子采样获得的多分辨率金字塔图像结构中"然后沿着多分辨率结构’由粗到细$9?531#/6?/K.#%(逐步进行估计"该方案期望在每个细化级别上的残余运动场都满足小运动假设#
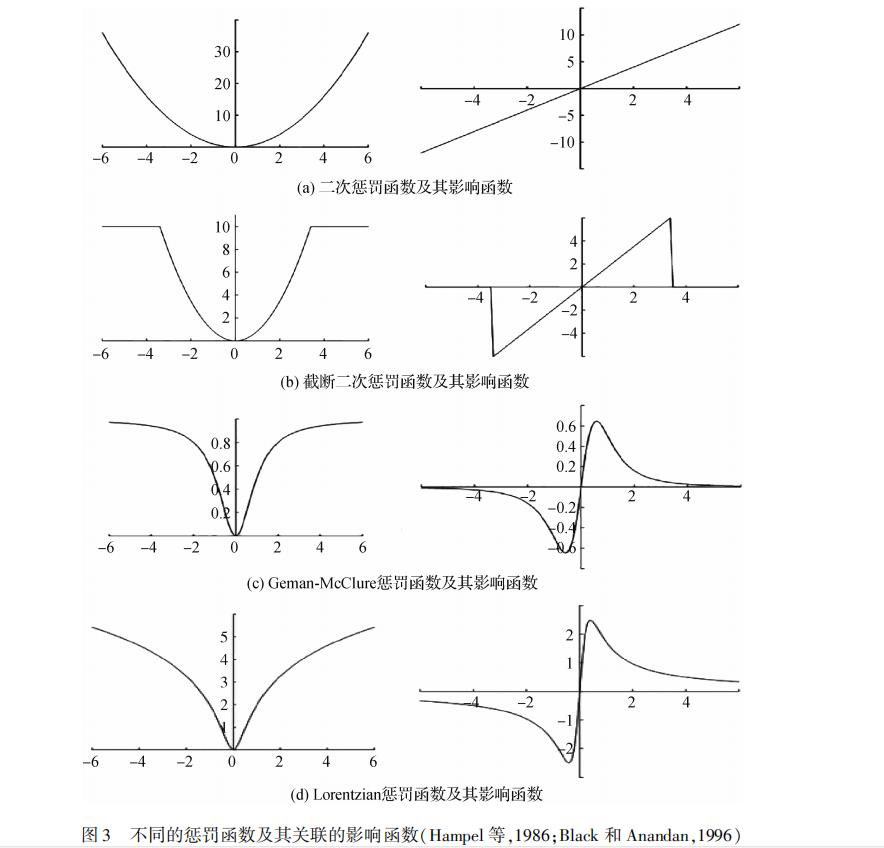
方法中得到了良好的应用,但是其相应的非凸能量函数都很难实现最小化。 Bruhn 等人(2005)选择了凸型 的 Charbonnierc 惩 罚 函 数 ( Charbonnier 等,1994)来构造能量函数。 Sun 等人(2010 ) 对凸型Charbonnierc 惩罚函数和非凸型 Lorentzian 函数进行测试,发现在测试集上使用凸型 Charbonnierc 惩罚函数的算法性能都优于使用鲁棒性较强的非凸型Lorentzian 惩罚函数的算法。 其中一个原因可能是非凸函数的优化难度较大,导致优化方案局部最优性较差。 此外 Sun 等人 ( 2010 ) 还对广义的凸Charbonnierc 惩罚函数( ρ(x) = (x2+ ε2)a,其中 x是函数变量, ε 是趋近于零的任意正实数) 进进一步研究发现当 a = 0. 45 时的轻微非凸惩罚函数的性能要比 Charbonnier 惩罚函数( a = 0. 5 )更好,而当 a 的取值导致函数更倾向于非凸惩罚函数(如 a = 0. 25)时则无改善。Sun 等人(2010) 发现在“由粗到细” 的增量估
计过程中加入中值滤波步骤也能有效去除异常值的影响。 但是,只是在较大邻域中进行中值滤波具有优势,在以拐角或薄结构为中心的邻域,计算中间值会导致过度平滑。 为了解决这个问题, Sun 等人(2014)提出了一种新的加权中值滤波模型,但在所有像素上应用加权中值运算增加了计算成本。
以上是关于流体运动估计光流算法研究的主要内容,如果未能解决你的问题,请参考以下文章