使用库实现步进电机指定角度旋转
Posted perseverance52
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了使用库实现步进电机指定角度旋转相关的知识,希望对你有一定的参考价值。
使用库实现步进电机指定角度旋转
步进电机和驱动器相关的资料
https://pan.baidu.com/s/1udb4MyEOXk4CTO7TKRHj6w
提取码: fuea
- 步进电机

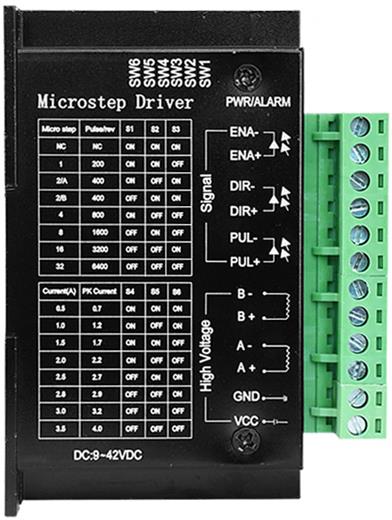
- TB6600驱动器
- **接线说明:**重点内容!!!!为什么一写步进电机就老生常谈这个接线问题问题,因为实在太重要了,关系到后面的工作能否继续开展。
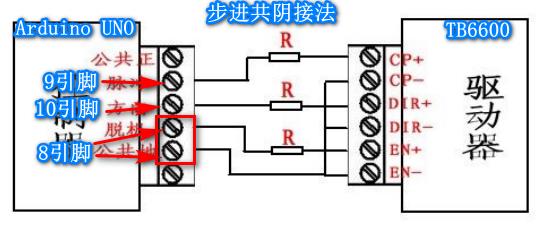
- 强调本实验采用共阴接线方法!!!
- 示例代码:
/*
* Simple demo, should work with any driver board
*
* Connect STEP, DIR as indicated
*
* Copyright (C)2015-2017 Laurentiu Badea
*
* This file may be redistributed under the terms of the MIT license.
* 步进电机驱动器采用共阴极接法
* TB6600拨码设置为1,2,4打到on
*/
#include <Arduino.h>
#include "BasicStepperDriver.h"
// Motor steps per revolution. Most steppers are 200 steps or 1.8 degrees/step
#define MOTOR_STEPS 200 //脉冲步数
#define RPM 210 // 转速设置
// 由于微步是在外部设置的,请确保这与选择的模式相匹配
// If it doesn't, the motor will move at a different RPM than chosen
// 1=full step, 2=half step etc.
#define MICROSTEPS 1 // 节拍全步和半步设置
// All the wires needed for full functionality
#define DIR 10 //方向引脚
#define STEP 9 //PUL引脚
//Uncomment line to use enable/disable functionality
#define SLEEP 8 //ENA使能引脚
// 2-wire basic config, microstepping is hardwired on the driver
//BasicStepperDriver stepper(MOTOR_STEPS, DIR, STEP);/在不使用ENA引脚情况下,ENA接GND(共阴接法)或者5V(共阳接法),
//Uncomment line to use enable/disable functionality
BasicStepperDriver stepper(MOTOR_STEPS, DIR, STEP, SLEEP);//200,
void setup() {
stepper.begin(RPM, MICROSTEPS);//初始化步进转速和节拍细分数
// if using enable/disable on ENABLE pin (active LOW) instead of SLEEP uncomment next line
stepper.setEnableActiveState(LOW);//设置ENA使能状态
}
void loop() {
// energize coils - the motor will hold position
stepper.enable();//使能ENA
/*
* Moving motor one full revolution using the degree notation
*/
stepper.rotate(360);//选择360度
/*
* Moving motor to original position using steps
*/
//stepper.move(MOTOR_STEPS*MICROSTEPS);
// pause and allow the motor to be moved by hand
stepper.disable();//停止旋转
delay(10000);
}
stepper.rotate(360);这里面的旋转角度,是在驱动器设置的MICROSTEPS细分数,也就是脉冲数以及电机的步距角匹配的情况下,才能实现旋转角度准确控制,脉冲数和驱动器的细分数设置不匹配,控制的角度就不一样了,请注意这一点!!!- 步距角为1.8度的步进电机(小电机),转一圈所用的脉冲数为 n=360/1.8=200个脉冲,所以设置的
MOTOR_STEPS 200;
以上是关于使用库实现步进电机指定角度旋转的主要内容,如果未能解决你的问题,请参考以下文章