《ROS理论与实践》学习笔记ROS通信编程
Posted Sakurazzy
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了《ROS理论与实践》学习笔记ROS通信编程相关的知识,希望对你有一定的参考价值。
《ROS理论与实践》学习笔记(二)ROS通信编程
在学习《ROS理论与实践》课程时,记录了学习过程中的编程练习,课后作业以及发现的问题,后续会对尚未解决的问题继续分析并更新,纯小白,仅供参考。
本次学习笔记关于课程中的第三讲:ROS通信编程 。主要学习了ROS的功能包创建、Topic通信编程以及Service通信编程。
课程内容编程练习
1.创建工作空间及功能包
创建一个工作空间命名为catkin_ws,创建一个功能包命名为learning_communication,并进行编译
#创建工作空间
$ mkdir -p ~/catkin_ws/src
$ cd ~/catkin_ws/src
$ catkin_init_workspace
#编译工作空间
$ cd ~/catkin_ws
$ catkin_make
#设置环境变量
$ source devel/setup.bash
# 检查环境变量
$ echo $ROS_PACKAGE_PATH
# 创建功能包
$ cd ~/catkin_ws/src
$ catkin_create_pkg learning_communication rospy roscpp std_msgs std_srvs
# 编译功能包
$ cd ~/catkin_ws
$ catkin_make
$ source ~/catkin_ws/devel/setup.bash
2.编程实现Topic通信
发布者代码实现流程:
- 初始化ROS节点;
- 向ROS Master注册节点信息,包括发布的话题名和话题中的消息类型;
- 创建消息数据;
- 按照一定频率循环发布消息。
订阅者代码实现流程:
- 初始化ROS节点;
- 订阅需要的话题;
- 循环等待话题消息,接收到消息后进入回调函数;
- 在回调函数中完成消息处理。
由于使用C++编程实现,需要在CMakeLists.txt中设置需要编译的代码和可执行文件,并设置链接库,自定义话题消息通过.msg文件建立。
练习代码来自深蓝学院课程,不再贴出。
3.编程实现Service通信
服务器代码实现流程:
- 初始化ROS节点;
- 创建Server实例;
- 循环等待服务请求,进入回调函数;
- 在回调函数中完成服务功能的处理,并反馈应答数据。
客户端代码实现流程:
- 初始化ROS节点;
- 创建一个Client实例;
- 发布服务请求数据;
- 等待Server处理之后的应答结果。
同样由于使用C++编程实现,需要在CMakeLists.txt中设置需要编译的代码和可执行文件,并设置链接库,自定义请求/应答数据通过.srv文件建立。
练习代码来自深蓝学院课程,不再贴出。
本讲作业
1.创建一个节点,在其中实现一个订阅者和一个发布者
- 发布者:发布海龟速度指令,让海龟圆周运动
- 订阅者:订阅海龟的位置信息,并在终端中周期打印输出
发布者代码如下:
/*该例程将发布turtle1/cmdvel话题,消息类型geometry_msgs::Twist*/
#include "ros/ros.h"
#include <geometry_msgs/Twist.h>
int main(int argc, char **argv)
{
// ROS节点初始化
ros::init(argc, argv, "circle_publisher");
// 创建节点句柄
ros::NodeHandle n;
// 创建一个Publisher,发布名为turtle1/cmd_vel的topic,消息类型为geometry_msgs/Twist
ros::Publisher circle_pub = n.advertise<geometry_msgs::Twist>("turtle1/cmd_vel", 1000);
// 设置循环的频率
ros::Rate loop_rate(10);
int count = 0;
while (ros::ok())
{
// 初始化geometry_msgs::Twist类型的消息
geometry_msgs::Twist speed_msg;
speed_msg.linear.x = 0.5;
speed_msg.angular.z = 0.2;
// 发布消息
ROS_INFO("setspeed [v:%0.2f ,a:%0.2f ]", speed_msg.linear.x,speed_msg.angular.z);
circle_pub.publish(speed_msg);
// 按照循环频率延时
loop_rate.sleep();
}
return 0;
}
订阅者代码如下:
/*该例程将订阅turtle1/pose话题,消息类型String*/
#include "ros/ros.h"
#include "turtlesim/Pose.h"
// 接收到订阅的消息后,会进入消息回调函数
void chatterCallback(const turtlesim::Pose::ConstPtr& msg)
{
// 将接收到的消息打印出来
ROS_INFO("turtle1's position: [%0.3f, %0.3f]", msg->x, msg->y);
}
int main(int argc, char **argv)
{
// 初始化ROS节点
ros::init(argc, argv, "pose_subscriber");
// 创建节点句柄
ros::NodeHandle n;
// 创建一个Subscriber,订阅名为turtle1/pose的topic,注册回调函数chatterCallback
ros::Subscriber sub = n.subscribe("/turtle1/pose", 10, chatterCallback);
// 循环等待回调函数
ros::spin();
return 0;
}
2.创建另外一个节点,在其中实现一个客户端
- 客户端:请求海龟诞生的服务,在仿真器中产生一只新的海龟
代码如下:
/*该例程将请求spawn服务,turtlesim::Spawn*/
#include "ros/ros.h"
#include "turtlesim/Spawn.h"
#include <time.h>
int main(int argc, char **argv)
{
char* name;
srand(time(NULL)); //随机种子,用于生成随机位置
name = argv[1];
// ROS节点初始化
ros::init(argc, argv, "create_client");
// 创建节点句柄
ros::NodeHandle n;
// 创建一个client,service消息类型是spawn
ros::service::waitForService("/spawn");
ros::ServiceClient add_turtle = n.serviceClient<turtlesim::Spawn>("/spawn");
// 创建turtlesim::Spawn类型的service消息
turtlesim::Spawn srv;
srv.request.x = rand() % 10;
srv.request.y = rand() % 10;
srv.request.name = name;
// 发布service请求,等待应答结果
ROS_INFO("call the service spawn at position [x:%0.2f, y:%0.2f] name:%s",srv.request.x,srv.request.y,srv.request.name.c_str());
add_turtle.call(srv);
// 显示服务调用结果
ROS_INFO("spawn successfully! [name:%s]", srv.response.name.c_str());
return 0;
}
调用方法:
$ roscore
$ rosrun turtlesim turtlesim_node
$ rosrun ch3 create_client turtle_name
3.综合运用话题与服务编程、命令行使用
- 通过命令行发送新生海龟的名字,即可在界面产生一只海龟,并且位置不重叠
- 通过命令行发送指令控制界面中任意海龟圆周运动的启动/停止,速度可通过命令行控制
生成海龟代码同2,发布速度指令代码如下:
/*该例程将发布turtle1/cmdvel话题,消息类型geometry_msgs::Twist */
#include "ros/ros.h"
#include <geometry_msgs/Twist.h>
#include <iostream>
using namespace std;
#include <string>
#include <sstream>
#include <stdlib.h>
int main(int argc, char **argv)
{
char* turname;//所要控制的海龟名字
char* speedxx;//设定线速度
char* speedzz;//设定角速度
turname = argv[1];
speedxx = argv[2];
speedzz = argv[3];
// ROS节点初始化
ros::init(argc, argv, "turtle_control");
// 创建节点句柄
ros::NodeHandle n;
// 选择海龟对应的话题
std::stringstream ss;
ss <<'/'<<turname<<"/cmd_vel";
// 创建一个Publisher,发布名为turtle1/cmd_vel的topic,消息类型为geometry_msgs/Twist
ros::Publisher circle_pub = n.advertise<geometry_msgs::Twist>(ss.str(), 1000);
// 设置循环的频率
ros::Rate loop_rate(10);
//将速度的字符指针转换为double型
double speedx;
double speedz;
speedx = atof(speedxx);
speedz = atof(speedzz);
while (ros::ok())
{
// 初始化geometry_msgs::Twist类型的消息
geometry_msgs::Twist speed_msg;
speed_msg.linear.x = speedx;
speed_msg.angular.z = speedz;
// 发布消息
ROS_INFO("setspeed [v:%0.2f ,a:%0.2f ]", speed_msg.linear.x,speed_msg.angular.z);
circle_pub.publish(speed_msg);
// 按照循环频率延时
loop_rate.sleep();
}
return 0;
}
调用方法:
#启动turtlesim_node节点
$ roscore
$ rosrun turtlesim turtlesim_node
#产生名为turtle2和turtle3的海龟
$ rosrun ch3 create_client turtle2
$ rosrun ch3 create_client turtle3
#向turtle1和turtle2分别发布速度指令
$ rosrun ch3 turtle_control turtle1 0.1 0.5
$ rosrun ch3 turtle_control turtle2 0.2 0.3
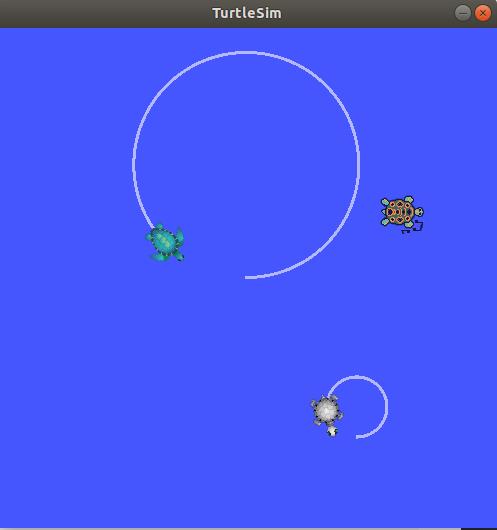
运行效果:
结语
本讲完成了功能包创建、Topic通信及Service通信的编程实现,并在作业中进行了综合练习。
在作业中遇到了一些问题:
- 如何通过命令行直接传入所需参数?
可以通过argv[]的字符指针直接传入参数,具体可以参考该博文:ROS向节点传递参数的方法总结 - 如何将传入的字符指针转换为double型变量?
可以通过atof()函数进行转换。 - 在向turtle节点发布速度指令时,同一时间只能使一只海龟运动,新发布的速度指令会覆盖前一次发布的速度指令,如何实现两只海龟的同时运动?
尚未解决。
以上是关于《ROS理论与实践》学习笔记ROS通信编程的主要内容,如果未能解决你的问题,请参考以下文章