全球卫星定位系统有哪四大定位系ǻ
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了全球卫星定位系统有哪四大定位系ǻ相关的知识,希望对你有一定的参考价值。
全球定位系统的总称是GNSS,对应的GNSS模块是指接收机类型涵盖GPS、北斗、GALILEO、GLONASS多个卫星定位系统的定位导航模块。
中国北斗卫星导航系统的简称是BDS,美国的全球卫星导航系统的简称是GPS,俄罗斯的全球卫星导航系统的简称是GLONASS,由欧盟研制和建立的全球卫星导航定位系统的简称是GALILEO。
GNSS模块通过运算与每个卫星的伪距离,采用距离交会法得出接收机的经度、纬度、高度和时间修正量这四个参数。并通过串行通信口不断输出NMEA格式的定位信息及辅助信息,供接收者选择应用。
SKYLAB的GNSS模块根据支持卫星信号的频段,分为单频GPS定位模块、单频北斗定位模块和单频北斗多模定位模块、双频北斗多模定位模块;根据定位精度的不同分为标准高精度GNSS定位模块和RTK高精度GNSS定位模块;根据使用方式的不同分为嵌入式内置型GNSS定位模块和外置型天线一体化GNSS G-mouse成品;根据模块性能的不同分为标准高精度GNSS定位模块,RTK高精度GNSS定位模块,弱信号GNSS+INS惯性组合导航模块和GNSS授时模块等。
参考技术A全球定位系统的总称是GNSS,对应的GNSS模块是指接收机类型涵盖GPS、北斗、GALILEO、GLONASS多个卫星定位系统的定位导航模块。
中国北斗卫星导航系统的简称是BDS,美国的全球卫星导航系统的简称是GPS,俄罗斯的全球卫星导航系统的简称是GLONASS,由欧盟研制和建立的全球卫星导航定位系统的简称是GALILEO。
GNSS模块通过运算与每个卫星的伪距离,采用距离交会法得出接收机的经度、纬度、高度和时间修正量这四个参数。并通过串行通信口不断输出NMEA格式的定位信息及辅助信息,供接收者选择应用。
SKYLAB的GNSS模块根据支持卫星信号的频段,分为单频GPS定位模块、单频北斗定位模块和单频北斗多模定位模块、双频北斗多模定位模块;根据定位精度的不同分为标准高精度GNSS定位模块和RTK高精度GNSS定位模块;根据使用方式的不同分为嵌入式内置型GNSS定位模块和外置型天线一体化GNSS G-mouse成品;根据模块性能的不同分为标准高精度GNSS定位模块,RTK高精度GNSS定位模块,弱信号GNSS+INS惯性组合导航模块和GNSS授时模块等。
自动驾驶感知——导航与定位
文章目录
1. 汽车定位技术
1.1 汽车定位技术的定义
• 定义:相对某一坐标系,确定自动驾驶车辆位置与姿态(6自由度,
X
,
Y
,
Z
,
Y
a
w
,
P
i
t
c
h
,
R
o
l
l
X,Y,Z,Yaw,Pitch,Roll
X,Y,Z,Yaw,Pitch,Roll)。
• 评定方法:精度、鲁棒性、覆盖场景等
1.2 汽车定位技术实现方式
在任何驾驶条件下,自动驾驶汽车均依赖于精准位姿信息。
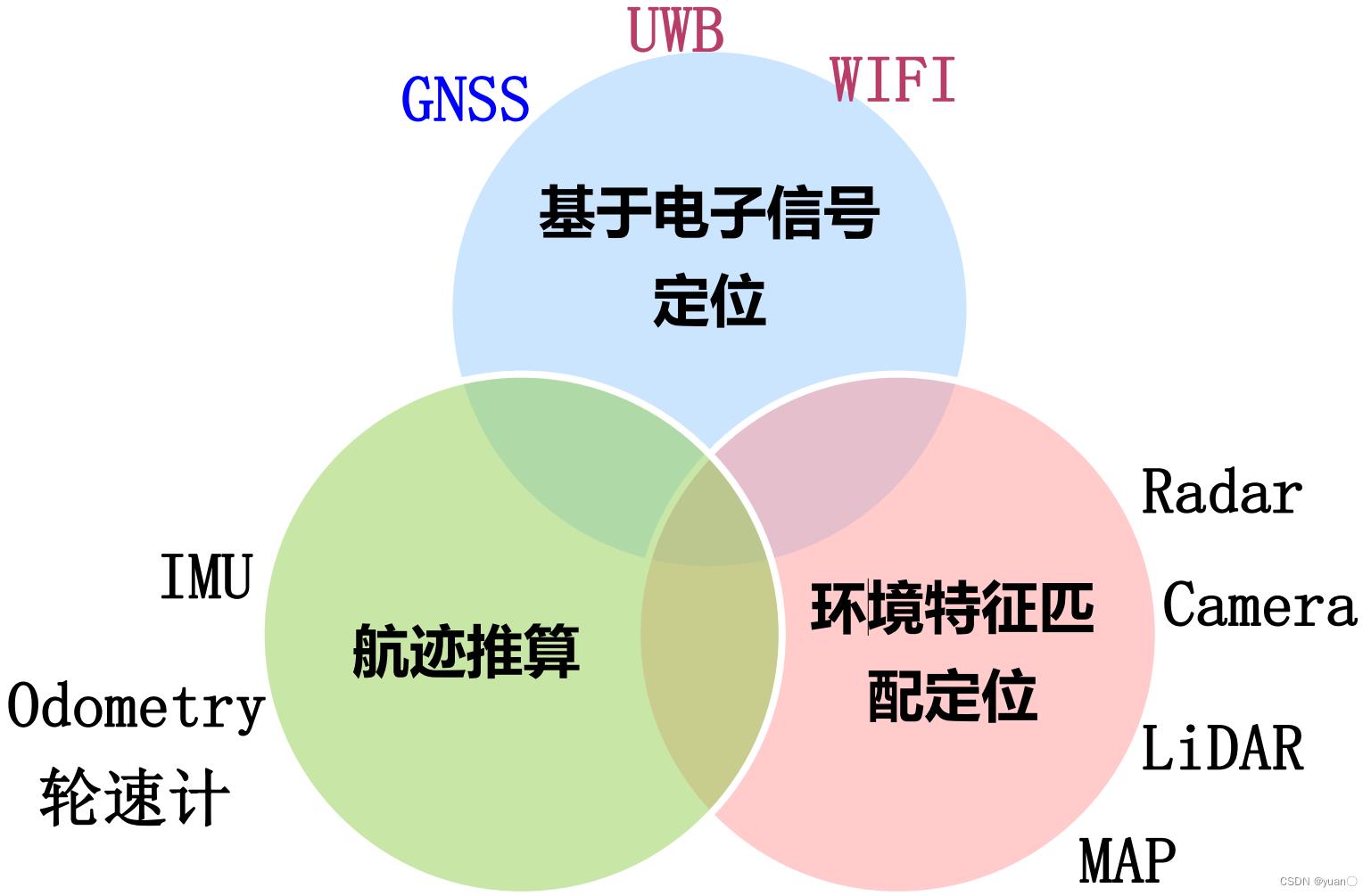
定位技术包括三大类:
- 基于电子信号定位:GNSS,UWB,Wi-Fi,Cell Phone等
- 基于轨迹推算:IMU、Odometry、轮速计等
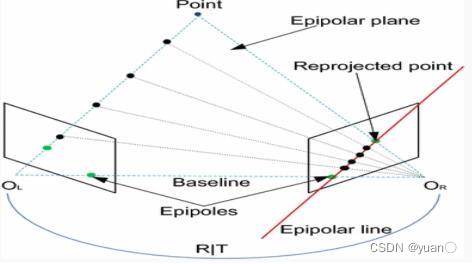
- 环境特征匹配:视觉、激光、融合定位等
1.3 定位源
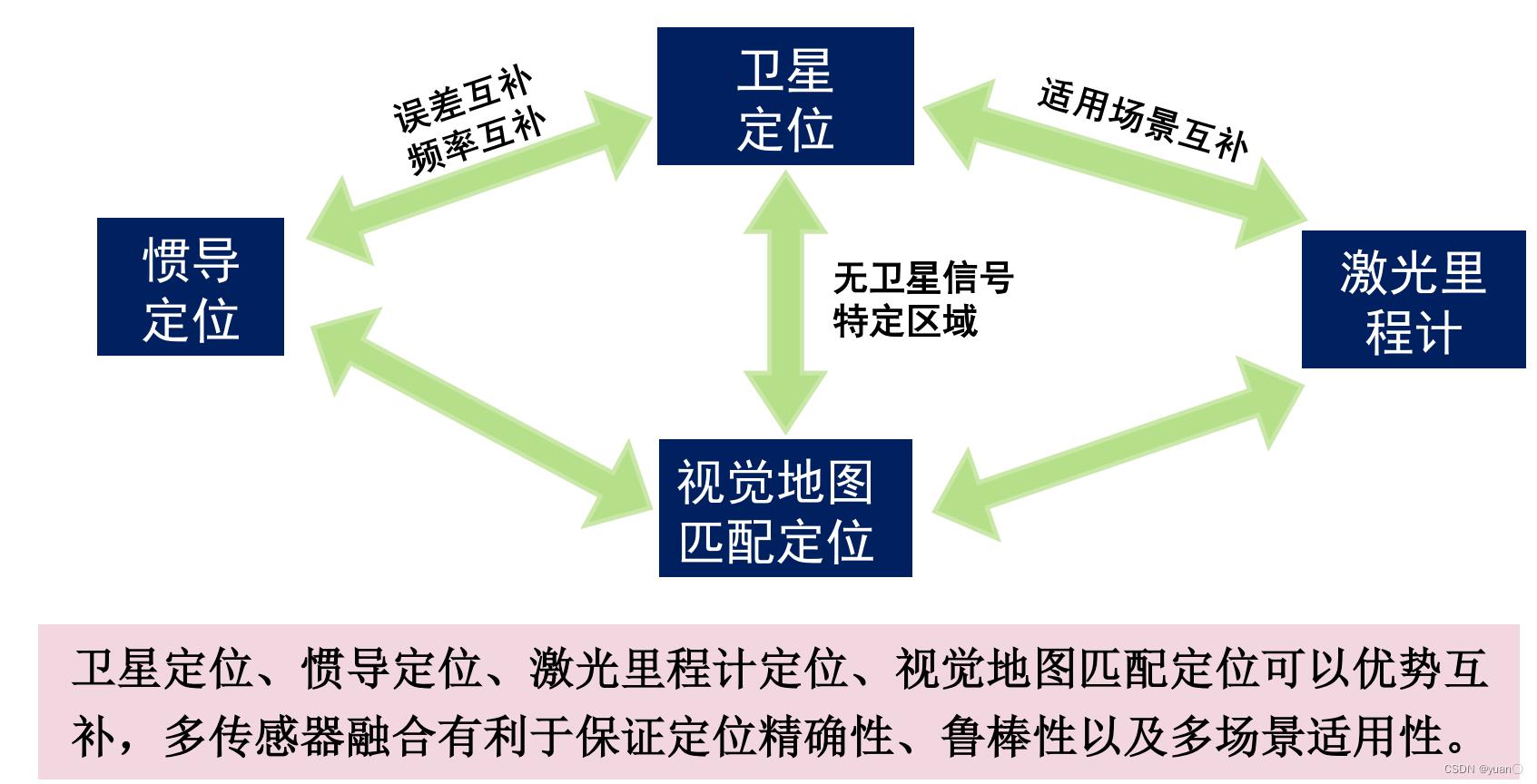
在不同交通场景下,每种定位源各有优缺,为提高车辆定位系统的整体性能,可以将定位方法进行优势互补,在提高定位精度的同时,定位方法具备一定的泛化能力。
| 卫星导航 | 惯性导航 | 视觉里程计 | 激光里程计 | 地图匹配定位 |
|---|---|---|---|---|
 |  |  |  |  |
| 绝对定位 | 相对定位 | 相对定位 | 相对定位 | 绝对定位 |
| 遮挡复杂环境,存在定位失锁 | 长时间运行存在累积误差 | 易受光照影响,对环境结构要求较高 | 空旷及特征缺乏环境下定位精度降低 | 地图构建与实时更新是难点所在 |
1.3.1 不同定位源之间的联系
2. 卫星定位技术
2.1 全球四大导航卫星系统
| 美国全球定位系统(Global Navigation System,GPS) | 俄罗斯格洛纳斯卫星导航系统 (Global Navigation Satellite System,GLONASS) | 中国北斗卫星导航系统(BeiDou Navigation Satellite System,BDS) | 欧洲伽利略卫星导航系统(Galileo Satellite Navigation System,GALILEO) |
|---|---|---|---|
| 距离地面20200公里,24颗卫星,6条轨道 | 距离地面24126公里,30颗卫星,3条轨道 | 21500公里,35颗卫星 |
2.1.1 GPS
GPS的系统组成:由空间部分、地面控制部分和用户设备部分三部分组成
GPS卫星星座:设计星座:21+3颗; 当前星:31颗

➢21颗正式的工作卫星+3颗活动的备用卫星
➢6个轨道面,平均轨道高度20200km,轨道倾角55 ,周期11h 58min(顾及地球自转,地球-卫星的几何关系每天提前4min重复一次
➢保证在24小时,在高度角15以上,能够同时观测到4至8颗卫星
2.1.2 GLONASS
格洛纳斯(GLONASS),是俄语“全球卫星导航系统GLOBAL NAVIGATION SATELLITE SYSTEM”的缩写。格洛纳斯卫星导航系统作用类似于美国的GPS、欧洲的伽利略卫星定位系统和中国的北斗卫星导航系统。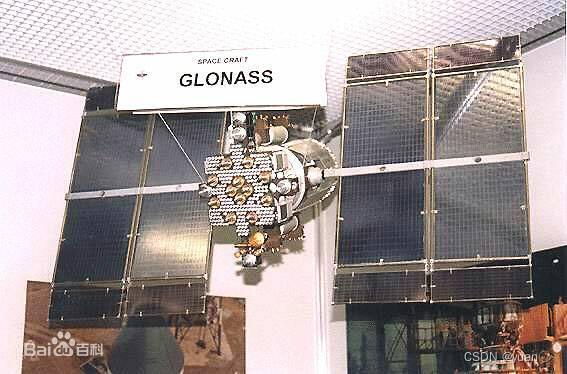
2.1.3 BDS
 组成:35颗卫星。5颗静止轨道,30颗中轨道。在轨高度21500公里。2020年底共发射了55颗卫星
组成:35颗卫星。5颗静止轨道,30颗中轨道。在轨高度21500公里。2020年底共发射了55颗卫星
北斗卫星导航系统可在全球范围内全天候、全天时为各类用户提供高精度、高可靠定位、导航、授时服务,并具短报文通信能力,已经初步具备区域导航、定位和授时能力。短报文通信:北斗系统用户终端具有双向报文通信功能,在远洋航行中有重要的应用价值。精密授时:北斗系统具有精密授时功能,可向用户提供20ns-100ns时间同步精度。
2.1.4 GALILEO
伽利略卫星导航系统(Galileo satellite navigation system),是由欧盟研制和建立的全球卫星导航定位系统,该计划于1999年2月由欧洲委员会公布,欧洲委员会和欧空局共同负责。系统由轨道高度为23616km的30颗卫星组成,其中27颗工作星,3颗备份星。卫星轨道高度约2.4万公里,位于3个倾角为56度的轨道平面内。截止2016年12月,已经发射了18颗工作卫星,具备了早期操作能力(EOC),并计划在2019年具备完全操作能力(FOC)。全部30颗卫星(调整为24颗工作卫星,6颗备份卫星)计划于2020年发射完毕。
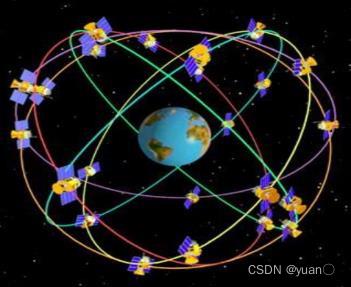
2.2 卫星定位原理
卫星定位系统组成:由空间部分、地面控制部分和用户设备部分等三部分组成 卫星定位至少需要同时观测4颗卫星。接下来说说原因。
卫星定位至少需要同时观测4颗卫星。接下来说说原因。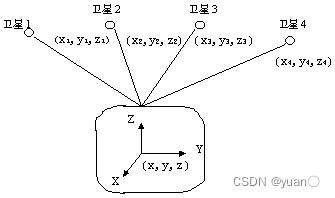 如图所示,可以列出以下方程:
(
x
1
−
x
)
2
+
(
y
1
−
y
)
2
+
(
z
1
−
z
)
2
=
c
(
v
t
1
−
v
t
0
)
=
d
1
(
x
2
−
x
)
2
+
(
y
2
−
y
)
2
+
(
z
2
−
z
)
2
=
c
(
v
t
2
−
v
t
0
)
=
d
2
(
x
3
−
x
)
2
+
(
y
3
−
y
)
2
+
(
z
3
−
z
)
2
=
c
(
v
t
3
−
v
t
0
)
=
d
3
(
x
4
−
x
)
2
+
(
y
4
−
y
)
2
+
(
z
4
−
z
)
2
=
c
(
v
t
4
−
v
t
0
)
=
d
4
\\beginarrayl\\sqrt (x_1 - x)^2 + (y_1 - y)^2 + (z_1 - z)^2 = c(v_t_1 - v_t_0) = d_1\\\\\\sqrt (x_2 - x)^2 + (y_2 - y)^2 + (z_2 - z)^2 = c(v_t_2 - v_t_0) = d_2\\\\\\sqrt (x_3 - x)^2 + (y_3 - y)^2 + (z_3 - z)^2 = c(v_t_3 - v_t_0) = d_3\\\\\\sqrt (x_4 - x)^2 + (y_4 - y)^2 + (z_4 - z)^2 = c(v_t_4 - v_t_0) = d_4\\endarray
(x1−x)2+(y1−y)2+(z1−z)2=c(vt1−vt0)=d1(x2−x)2+(y2−y)2+(z2−z)2=c(vt2−vt0)=d2(x3−x)2+(y3−y)2+(z3−z)2=c(vt3−vt0)=d3(x4−x)2+(y4−y)2+(z4−z)2=c(vt4−vt0)=d4四个方程式中各个参数意义如下:
如图所示,可以列出以下方程:
(
x
1
−
x
)
2
+
(
y
1
−
y
)
2
+
(
z
1
−
z
)
2
=
c
(
v
t
1
−
v
t
0
)
=
d
1
(
x
2
−
x
)
2
+
(
y
2
−
y
)
2
+
(
z
2
−
z
)
2
=
c
(
v
t
2
−
v
t
0
)
=
d
2
(
x
3
−
x
)
2
+
(
y
3
−
y
)
2
+
(
z
3
−
z
)
2
=
c
(
v
t
3
−
v
t
0
)
=
d
3
(
x
4
−
x
)
2
+
(
y
4
−
y
)
2
+
(
z
4
−
z
)
2
=
c
(
v
t
4
−
v
t
0
)
=
d
4
\\beginarrayl\\sqrt (x_1 - x)^2 + (y_1 - y)^2 + (z_1 - z)^2 = c(v_t_1 - v_t_0) = d_1\\\\\\sqrt (x_2 - x)^2 + (y_2 - y)^2 + (z_2 - z)^2 = c(v_t_2 - v_t_0) = d_2\\\\\\sqrt (x_3 - x)^2 + (y_3 - y)^2 + (z_3 - z)^2 = c(v_t_3 - v_t_0) = d_3\\\\\\sqrt (x_4 - x)^2 + (y_4 - y)^2 + (z_4 - z)^2 = c(v_t_4 - v_t_0) = d_4\\endarray
(x1−x)2+(y1−y)2+(z1−z)2=c(vt1−vt0)=d1(x2−x)2+(y2−y)2+(z2−z)2=c(vt2−vt0)=d2(x3−x)2+(y3−y)2+(z3−z)2=c(vt3−vt0)=d3(x4−x)2+(y4−y)2+(z4−z)2=c(vt4−vt0)=d4四个方程式中各个参数意义如下:
x
、
y
、
z
x、y、z
x、y、z为待测点坐标的空间直角坐标。
x
i
、
y
i
、
z
i
(
i
=
1
、
2
、
3
、
4
)
x_i 、y_i 、z_i (i=1、2、3、4)
xi、yi、zi(i=1、2、3、4)分别为卫星1、卫星2、卫星3、卫星4在t时刻的空间直角坐标,可由卫星导航电文求得。
V
t
i
(
i
=
1
、
2
、
3
、
4
)
V_t_i (i=1、2、3、4)
Vt以上是关于全球卫星定位系统有哪四大定位系ǻ的主要内容,如果未能解决你的问题,请参考以下文章