ROS实验笔记之——基于Prometheus的控制模块
Posted gwpscut
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS实验笔记之——基于Prometheus的控制模块相关的知识,希望对你有一定的参考价值。
之前博客《ROS实验笔记之——基于Prometheus自主无人机开源项目的学习与仿真》已经介绍过Prometheus项目。
本博文继续学习其中的控制模块~
首先需要注意的是,要运行这个项目需要保证.bashrc文件里面的设置正确,如下所示:
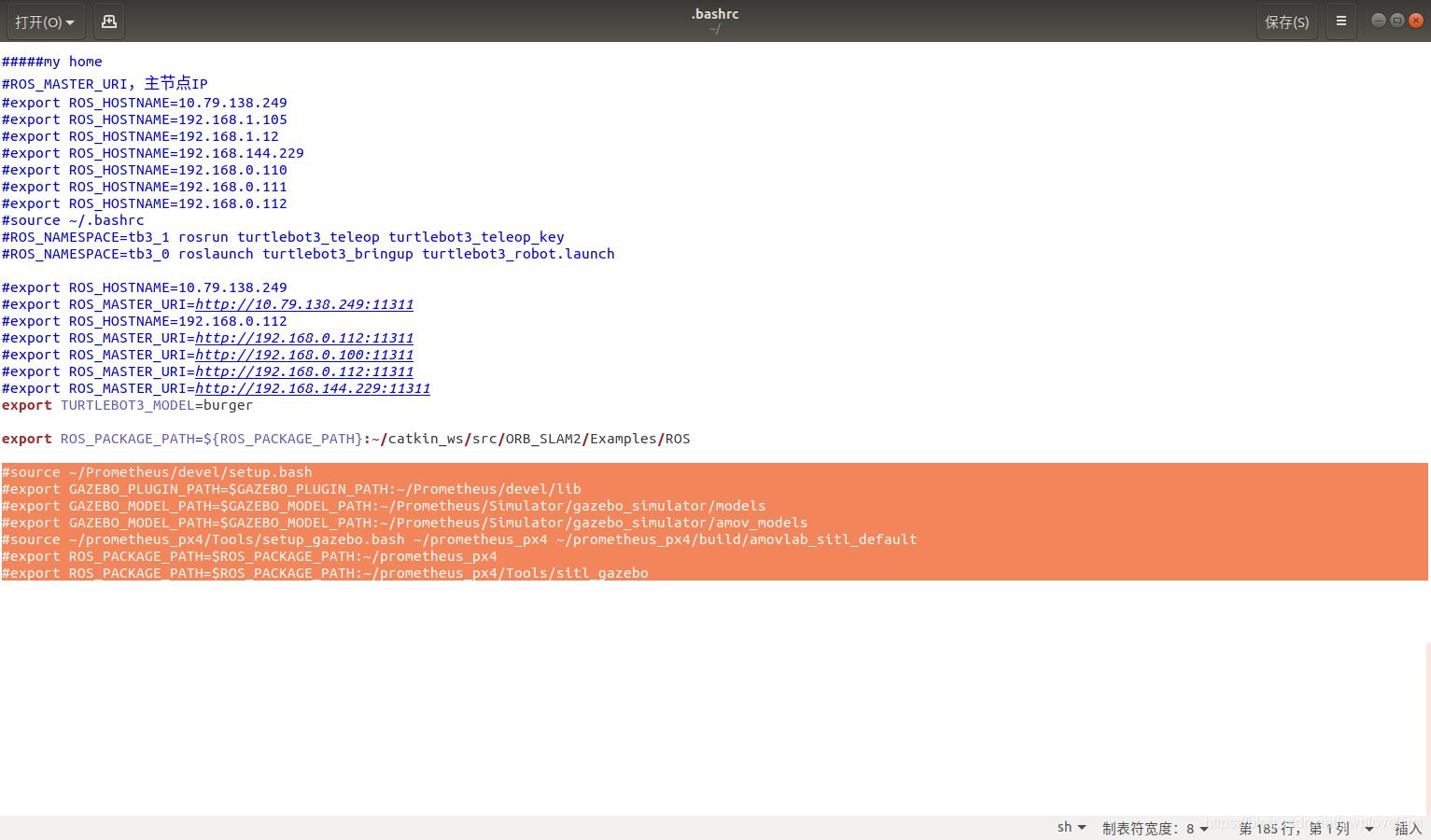
一旦更新了代码后,需要运行下面命令进行编译
cd Prometheus
./compile_gazebo.sh好~接下来就具体看看代码。对代码的理解写在了注释里面~
Control model
px4_sender
给飞行控制器发送各种期望值(实际控制算法运行在飞控中)
px4_pos_controller
位置环控制代码,订阅无人机当前位置及期望位置。并通过位置控制器进行解算得到期望姿态角。最终把期望姿态角发送到PX4飞控中,由PX4飞控进行姿态环控制。
而目前工程中已经实现了5种位置环控制器(/home/kwanwaipang/Prometheus/Modules/control/inc
以上是关于ROS实验笔记之——基于Prometheus的控制模块的主要内容,如果未能解决你的问题,请参考以下文章