开发者说| Apollo 源码分析系列感知篇:红绿灯检测和识别
Posted Apollo开发者社区
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了开发者说| Apollo 源码分析系列感知篇:红绿灯检测和识别相关的知识,希望对你有一定的参考价值。
下面是由社区开发者—Frank909提供的文章,本文主要分析 Apollo 6.0 中红绿灯检测和识别中的相关算法逻辑及部分代码实现。
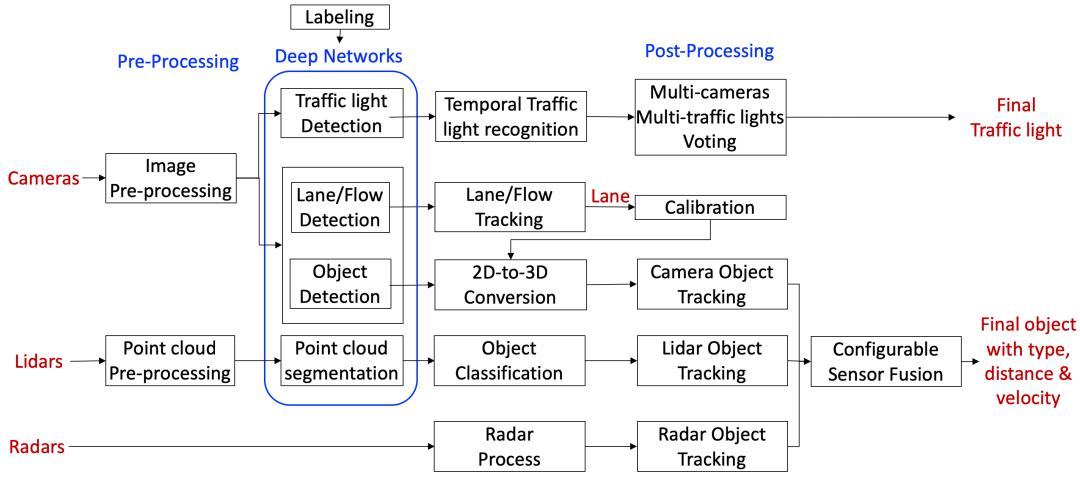
感知架构图

Apollo 默认有 2 个前视摄像头:
25mm 焦距看远处,视距长,但 FOV 小。
6mm 焦距看近处,视距短,但 FOV 大。
两个摄像头都可以检测到红绿灯,它们相互冗余,但是同一时刻只能以一个为主。

Apollo gitee 仓库图示
 Apollo gitee
仓库图示
Apollo gitee
仓库图示
上面的图片是来自于长焦相机,能看得很远,但视野窄,下面的正好相反。
红
黄
绿
黑
未知

预处理阶段
处理阶段
预处理阶段-信号灯投影
预处理阶段第一个任务,就是要根据车辆定位信息从高精度地图中查询红绿灯的物理信息,从而得到信号灯的物理坐标,然后再通过相机模型和标定好的相机内参,将信号灯从 3D 世界中投影到 2D 图像当中变成一个 Bounding Box。
信号灯的物理位置信息长这样:
signal info:id {id: "xxx"}boundary {point { x: ... y: ... z: ... }point { x: ... y: ... z: ... }point { x: ... y: ... z: ... }point { x: ... y: ... z: ... }}
预处理阶段-相机选择
上文讲到有 2 个相机,我们优先选择长焦的相机,因为长焦能将远处的信号灯显示的比较大且清晰,容易做颜色识别;当长焦没有办法检测到所有红绿灯时,我们再选择短焦。同一个算法处理周期,只有一个摄像头的图片才能够进行处理。
预处理阶段-图片信息及缓存同步
在自动驾驶中,因为考虑到车辆行驶速度很快,因此障碍物的识别一般要求实时,也就是 30FPS 以上。
但相对于障碍物,红绿灯的位置信息没有那么重要,重要的是它的语义信息,也就是红绿颜色变化,但这种频率是非常低的,所以对于红绿灯检测而言,则不需要那么高的频率,也因此不需要针对每一帧图片都做红绿灯处理。
因此,我们可以隔一个固定的时间周期去查询高精度地图中的红绿灯信息,然后选择最近的图片缓存一起送入到红绿灯处理模型当中,其它的图片就可以丢掉了。
处理阶段-修整(Rectifier)
预处理会产生一张图片和对应的红绿灯信息(2D bbox),但因为误差问题,2D bbox 和实际上观察到的红绿灯是有偏差的,甚至很大,所以要基于 bbox 设置一个 ROI 区域。
将带有 ROI 信息的图片传输给一个 CNN 做检测,最终会输出一系列的信号灯结果。
处理阶段-识别(Recognizer)
检测是为了估算位置,而识别是要分辨信号灯的颜色。
将 ROI 和信号灯结果连同图像输入给一个 CNN,这个 CNN 就会给出信号灯的颜色信息。
预处理阶段-修正(Revisor)
因为交通灯都会闪烁,所以前一个流程的结果可能不准确,因此需要结合历史信息进行推断。比如收到的信号是绿或者红,那么直接输出;如果是黑色,或者是未知状态,就要根据历史缓存进行推断,如果前面的状态不是黑色或者未知就输出历史状态,否则输出黑色或者未知。这里需要注意,黄灯只能在绿色和红色之间,如果顺序不对就会被丢弃。

*CSDN
https://blog.csdn.net/briblue/article/details/111598755
https://mp.weixin.qq.com/s/hlsBBc9p4kc3SuwGnGqnZw
以上是" Apollo 源码分析系列感知篇(三):红绿灯检测和识别"的全部内容,更多话题讨论、技术交流可以扫描下方二维码添加『Apollo小哥哥』为好友,进开发者交流群。




以上是关于开发者说| Apollo 源码分析系列感知篇:红绿灯检测和识别的主要内容,如果未能解决你的问题,请参考以下文章
自动驾驶 Apollo 源码分析系列,感知篇:将红绿灯检测和识别代码细致走读一遍
自动驾驶 Apollo 源码分析系列,感知篇:车道线检测基本流程
自动驾驶 Apollo 源码分析系列,感知篇:Lidar 障碍物检测基本流程
自动驾驶 Apollo 源码分析系列,感知篇:Lidar 障碍物检测基本流程