rm记录第三阶段:海康威视工业相机的使用,cmake的复习
Posted 神佑我调参侠
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了rm记录第三阶段:海康威视工业相机的使用,cmake的复习相关的知识,希望对你有一定的参考价值。
前言
相机到了,这也是我的第一次使用相机,然后呢在大符识别的程序完事后也是搁了很长的时间,然后工训的省赛也是比完了,反正这次比赛我深刻的认识到现场环境对视觉的影响真的是太大了,所以现在我也是得考虑现场的因素啥的,还有就是最近也是自己没有很上进,想得也是太多了,其实我更应该注重当下呀!
那来把啊,注重当下,开干!
我们使用的是海康的工业相机,先了解一下什么是工业相机去!
首先我们在官网上下载客户端和sdk,然后我下载的是arrch64的,这个是网站:https://www.hikrobotics.com/machinevision/service/download?module=0

然后的话就是先要运行一下那个 setup.sh 那个,然后记住这里要用sudo否则没有权限!
然后的话也是将第一个案例成功的运行了,但是图像采集的不太好呀啊!
Cmake
然后我们学一下cmake,其实我感觉忘我的cmake老是学得不透,那么趁着这次我再次学一下。
然后的话通过几个例子来学习一下下:
1.最简单的就是先设置一个版本号然后就是工程的名字,最后就是生成一个可执行文件
cmake_minimum_required (VERSION 2.6)
project (Tutorial)
add_executable(Tutorial tutorial.cxx)2.配置头文件,这里以前确实是没有注意到呀。这个就是设置个目录不是添加某文件
添加头文件目录INCLUDE_DIRECTORIES
语法: include_directories([AFTER|BEFORE] [SYSTEM] dir1 [dir2 ...]) 它相当于g++选项中的-I参数的作用,也相当于环境变量中增加路径到CPLUS_INCLUDE_PATH变量的作用:
如:include_directories(../../../thirdparty/comm/include)cmake_minimum_required (VERSION 2.6)
project (Tutorial)
# The version number.
set (Tutorial_VERSION_MAJOR 1)
set (Tutorial_VERSION_MINOR 0)
# configure a header file to pass some of the CMake settings
# to the source code
configure_file (
"${PROJECT_SOURCE_DIR}/TutorialConfig.h.in"
"${PROJECT_BINARY_DIR}/TutorialConfig.h"
)
# add the binary tree to the search path for include files
# so that we will find TutorialConfig.h
include_directories("${PROJECT_BINARY_DIR}")
# add the executable
add_executable(Tutorial tutorial.cxx)3.添加一个 库
添加需要链接的库文件目录LINK_DIRECTORIES
语法: link_directories(directory1 directory2 ...) 它相当于g++命令的-L选项的作用,也相当于环境变量中增加LD_LIBRARY_PATH的路径的作用。
如:link_directories("/home/server/third/lib")现在我们为我们的工程添加一个库。这个库包含了自己实现的一个用来计算数的平方根函数。应用程序可以使用这个库来计算平方根,而不是使用编译器提供的标准库。教程里我们会把这个库放到一个叫做”MathFunctions”的子文件夹中。它包含一个只有一行内容的CMakeLists.txt文件,这里注意一下就是我们是分子文件夹的。
add_library(MathFunctions mysqrt.cxx)文件”mysqrt.cxx”有一个叫做mysqrt的函数,它跟编译器提供的sqrt函数类似。为了使用这个新库,我们要在顶层的CMakeLists.txt中添加”add_subdirectory”调用,以便使这个库能够被编译到.我们还需要添加另外一个包含文件夹以便找到包含在头文件”MathFunctions/MathFunctions.h”中的函数原型.最后把新库添加到应用程序当中,在顶层的CMakeLists.txt文件中添加如下内容:
include_directories ("${PROJECT_SOURCE_DIR}/MathFunctions")
add_subdirectory (MathFunctions)
# add the executable
add_executable (Tutorial tutorial.cxx)
target_link_libraries (Tutorial MathFunctions)
然后这里说下流程:先在子文件夹中生成一个自己生成的库然后下一步在主的cmakelisits里包含这个目录,然后添加这个库,最后将这个库链接到可执行文件上去。
4.最后就是去添加库文件
这个一会直接上案例,看最后一行
然后的话:记住在main文件里的要写绝对路径
最后运行成功了,然后看一下CMakeLists.txt是怎么写的吧:用时记得换路径

project(fan)
CMAKE_MINIMUM_REQUIRED(VERSION 3.10)
find_package(OpenCV REQUIRED)
find_package(OpenCV QUIET COMPONENTS core highgui imgproc imgcodecs videoio)
AUX_SOURCE_DIRECTORY(./ DIR_SRCS)
include_directories(${OpenCV_INCLUDE_DIRS})
include_directories(/home/dji/文档/RM2021/capture/MVS/inlude)
link_directories(${OpenCV_LIBRARY_DIRS})
link_directories("/home/dji/文档/RM2021/capture/MVS/lib/aarch64")
link_libraries("/home/dji/文档/RM2021/capture/MVS/lib/aarch64/libMvCameraControl.so")
SET(EXECUTABLE_OUTPUT_PATH ${PROJECT_BINARY_DIR}/bin)
add_compile_options(-std=c++11)
#-Wall -Werror
ADD_EXECUTABLE(fan ${DIR_SRCS})
target_link_libraries(fan ${OpenCV_LIBS})
target_link_libraries(fan -lpthread -luuid -lMvCameraControl -lX11)
target_link_libraries(fan libMvCameraControl.so)
开始使用相机
然后我们就学一下这个display.cpp这个文件,也就是如何调用相机
然后我们从主函数看起:这个主函数有点蒙呀,主要我不知道这个库有那些函数呀,直接看代码有点看不懂呀.........要不我就直接套用,然后吧其中的图像处理的换成我们想用的!试试看吧!ImageProcess.cpp看这个cpp文件!
现在我在想怎么将获得的图像转 换 成mat对象呢!: https://www.hikvision.com/cn/download_60.html 这个是海康的官网吧,去看看去!
然后我也是参考了一些的博客先了解了一下相机的工作流程:
- 枚举设备
-
判断设备类型:基于以上枚举设备接口调用获取的设备列表,可以获取设备是哪种类型设备并对其中的信息加以利用和输出;
-
输入连接设备
-
创建相机实例并创建句柄
-
打开设备
-
获取相关参数
-
获取图像:在海康的接口调用中,取图方式分为两种方式,第一种是主动取图,第二种是回调取图;
-
开始取流
-
停止取流
-
销毁句柄
感觉好复杂呀.......不过好像复杂的就是前面的几步吧,因为毕竟是网络摄像头,然后就是可能opencv的capture类用惯了,一时有点不适应,那么我感觉还是把一个例子看懂吧,否则一直都不会懂的,也不要着急,一步步来!
那么我们就说下这些东西吧!
直接main函数看起,对了这个是ImageProcess.cpp
int nRet = MV_OK;
void* handle = NULL;
unsigned char * pData = NULL;
unsigned char *pDataForRGB = NULL;
unsigned char *pDataForSaveImage = NULL;上来先来几个定义:后面遇到时再说是什么。
然后是一个do,while的结构,我们直接看里面的:
MV_CC_DEVICE_INFO_LIST stDeviceList;
memset(&stDeviceList, 0, sizeof(MV_CC_DEVICE_INFO_LIST));然后上了2行,第一行就是初始化一个列表对象,然后第二行的函数的作用是初始化的作用,就是初始化这个列表对象。(不过,我感觉我应该深度学一下c了,这个函数我居然是第一次看见..........)
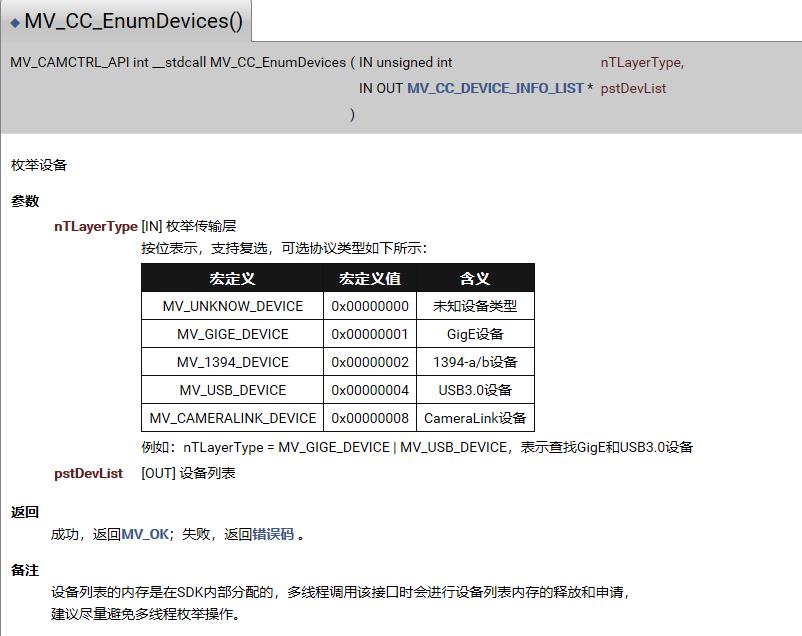
// 枚举设备
// enum device
nRet = MV_CC_EnumDevices(MV_GIGE_DEVICE | MV_USB_DEVICE, &stDeviceList);
if (MV_OK != nRet)
{
printf("MV_CC_EnumDevices fail! nRet [%x]\\n", nRet);
break;
}
if (stDeviceList.nDeviceNum > 0)
{
for (int i = 0; i < stDeviceList.nDeviceNum; i++)
{
printf("[device %d]:\\n", i);
MV_CC_DEVICE_INFO* pDeviceInfo = stDeviceList.pDeviceInfo[i];
if (NULL == pDeviceInfo)
{
break;
}
PrintDeviceInfo(pDeviceInfo);
}
}
else
{
printf("Find No Devices!\\n");
break;
}
printf("Please Intput camera index: ");然后就是枚举设备了,因为 我们就是用一个相机,所以上面的代码也没有必要深究,但要知道我们的相机索引是0。
unsigned int nIndex = 0;
scanf("%d", &nIndex);
if (nIndex >= stDeviceList.nDeviceNum)
{
printf("Intput error!\\n");
break;
}
然后这里是输入一个数,那么我一会开发的时候肯定会把这句话去掉的。
// 选择设备并创建句柄
// select device and create handle
nRet = MV_CC_CreateHandle(&handle, stDeviceList.pDeviceInfo[nIndex]);
if (MV_OK != nRet)
{
printf("MV_CC_CreateHandle fail! nRet [%x]\\n", nRet);
break;
}然后下一步就是选择我们的相机创建句柄了。
// 打开设备
// open device
nRet = MV_CC_OpenDevice(handle);
if (MV_OK != nRet)
{
printf("MV_CC_OpenDevice fail! nRet [%x]\\n", nRet);
break;
}之后就是打开我们的设备了。以上两步其实很简单就是调用库的函数就行了。
然后下面的代码是对网络摄像头的代码所以我直接选择略过。
// ch:获取数据包大小 | en:Get payload size
MVCC_INTVALUE stParam;
memset(&stParam, 0, sizeof(MVCC_INTVALUE));
nRet = MV_CC_GetIntValue(handle, "PayloadSize", &stParam);
if (MV_OK != nRet)
{
printf("Get PayloadSize fail! nRet [0x%x]\\n", nRet);
break;
}然后这步不知道有什么用?先往下看:
// 开始取流
// start grab image
nRet = MV_CC_StartGrabbing(handle);
if (MV_OK != nRet)
{
printf("MV_CC_StartGrabbing fail! nRet [%x]\\n", nRet);
break;
}
MV_FRAME_OUT_INFO_EX stImageInfo = {0};
memset(&stImageInfo, 0, sizeof(MV_FRAME_OUT_INFO_EX));
pData = (unsigned char *)malloc(sizeof(unsigned char) * stParam.nCurValue);
if (NULL == pData)
{
break;
}开始取流了。这些代码一会直接套用。
nRet = MV_CC_GetOneFrameTimeout(handle, pData, nDataSize, &stImageInfo, 1000);
if (nRet == MV_OK)
{
printf("Now you GetOneFrame, Width[%d], Height[%d], nFrameNum[%d]\\n\\n",
stImageInfo.nWidth, stImageInfo.nHeight, stImageInfo.nFrameNum);
// 处理图像
// image processing
printf(" 0 to do nothing\\n");
printf(" 1 to convert RGB\\n");
printf(" 2 to save as BMP\\n");
printf("Please Input Index: ");
int nInput = 0;
scanf("%d", &nInput);
switch (nInput)
{
// 不做任何事,继续往下走
// do nothing, and go on next
case 0:
{
break;
}
// 转换图像为RGB格式,用户可根据自身需求转换其他格式
// convert image format to RGB, user can convert to other format by their requirement
case 1:
{
pDataForRGB = (unsigned char*)malloc(stImageInfo.nWidth * stImageInfo.nHeight * 4 + 2048);
if (NULL == pDataForRGB)
{
break;
}
// 像素格式转换
// convert pixel format
MV_CC_PIXEL_CONVERT_PARAM stConvertParam = {0};
// 从上到下依次是:图像宽,图像高,输入数据缓存,输入数据大小,源像素格式,
// 目标像素格式,输出数据缓存,提供的输出缓冲区大小
// Top to bottom are:image width, image height, input data buffer, input data size, source pixel format,
// destination pixel format, output data buffer, provided output buffer size
stConvertParam.nWidth = stImageInfo.nWidth;
stConvertParam.nHeight = stImageInfo.nHeight;
stConvertParam.pSrcData = pData;
stConvertParam.nSrcDataLen = stImageInfo.nFrameLen;
stConvertParam.enSrcPixelType = stImageInfo.enPixelType;
stConvertParam.enDstPixelType = PixelType_Gvsp_RGB8_Packed;
stConvertParam.pDstBuffer = pDataForRGB;
stConvertParam.nDstBufferSize = stImageInfo.nWidth * stImageInfo.nHeight * 4 + 2048;
nRet = MV_CC_ConvertPixelType(handle, &stConvertParam);
if (MV_OK != nRet)
{
printf("MV_CC_ConvertPixelType fail! nRet [%x]\\n", nRet);
break;
}
FILE* fp = fopen("AfterConvert_RGB.raw", "wb");
if (NULL == fp)
{
printf("fopen failed\\n");
break;
}
fwrite(pDataForRGB, 1, stgtConvertParam.nDstLen, fp);
fclose(fp);
printf("convert succeed\\n");
break;
}
case 2:
{
pDataForSaveImage = (unsigned char*)malloc(stImageInfo.nWidth * stImageInfo.nHeight * 4 + 2048);
if (NULL == pDataForSaveImage)
{
break;
}
// 填充存图参数
// fill in the parameters of save image
MV_SAVE_IMAGE_PARAM_EX stSaveParam;
memset(&stSaveParam, 0, sizeof(MV_SAVE_IMAGE_PARAM_EX));
// 从上到下依次是:输出图片格式,输入数据的像素格式,提供的输出缓冲区大小,图像宽,
// 图像高,输入数据缓存,输出图片缓存,JPG编码质量
// Top to bottom are:
stSaveParam.enImageType = MV_Image_Bmp;
stSaveParam.enPixelType = stImageInfo.enPixelType;
stSaveParam.nBufferSize = stImageInfo.nWidth * stImageInfo.nHeight * 4 + 2048;
stSaveParam.nWidth = stImageInfo.nWidth;
stSaveParam.nHeight = stImageInfo.nHeight;
stSaveParam.pData = pData;
stSaveParam.nDataLen = stImageInfo.nFrameLen;
stSaveParam.pImageBuffer = pDataForSaveImage;
stSaveParam.nJpgQuality = 80;
nRet = MV_CC_SaveImageEx2(handle, &stSaveParam);
if(MV_OK != nRet)
{
printf("failed in MV_CC_SaveImage,nRet[%x]\\n", nRet);
break;
}
FILE* fp = fopen("image.bmp", "wb");
if (NULL == fp)
{
printf("fopen failed\\n");
break;
}
fwrite(pDataForSaveImage, 1, stSaveParam.nImageLen, fp);
fclose(fp);
printf("save image succeed\\n");
break;
}
default:
break;
}
}
else
{
printf("No data[%x]\\n", nRet);
}这些代码呢,就是先取一帧图像,然后进行图像处理,这里我发现一个事,就是好像这些函数再执行完函数后有个哦返回值,然后根据这个返回值在进行下一步操作,我也可以学习这种设计方式,好处就是不会出现空值啥的。
一会我用的时候直接用rgb的!
// 停止取流
// end grab image
nRet = MV_CC_StopGrabbing(handle);
if (MV_OK != nRet)
{
printf("MV_CC_StopGrabbing fail! nRet [%x]\\n", nRet);
break;
}
// 销毁句柄
// destroy handle
nRet = MV_CC_DestroyHandle(handle);
if (MV_OK != nRet)
{
printf("MV_CC_DestroyHandle fail! nRet [%x]\\n", nRet);
break;
}然后的话就是停止取流和摧毁句柄了
自己去实现 一回,要是成功了,下一步就加线程了,就可以了,开干:
- 我试了很长时间但是发现还是实现不了,于是我又看了一圈博客,发现得用回调,然后视频解码真的难搞,不过也是得学习一波:https://blog.csdn.net/CSDNwei/article/details/73896535?utm_medium=distribute.pc_relevant.none-task-blog-baidujs_title-4&spm=1001.2101.3001.4242,这个也只是学个思路感觉还是得自己去写,难搞!可恶呀,那么接下来的话我应该先学一下回调取流,然后在加线程
看一下回调取流的例子:Grab_ImageCallback.cpp
然后我们在看完上一个例子,看这个例子的时候就不会那么蒙了,然后的就是多了几个函数,还有就是主函数的几行有变化,那么现在开始:
// 设置触发模式为off
// set trigger mode as off
nRet = MV_CC_SetEnumValue(handle, "TriggerMode", 0);
if (MV_OK != nRet)
{
printf("MV_CC_SetTriggerMode fail! nRet [%x]\\n", nRet);
break;
}
// 注册抓图回调
// register image callback
nRet = MV_CC_RegisterImageCallBackEx(handle, ImageCallBackEx, handle);
if (MV_OK != nRet)
{
printf("MV_CC_RegisterImageCallBackEx fail! nRet [%x]\\n", nRet);
break;
}
主函数就这几行不一样:
这个触发现在用不到,然后的话下面这行就是最重要的了,其实就一个要主意就是那个中间的参数,这个是我们写的函数,然后就是会执行,一会我们改进,opencv转化就在这个函数里写。
好,现在开始改进。
改了很长时间,然后本来我还合计那个博客的库哪来的呢,后来我去查了一下,发现是海康的库,这..................https://www.hikvision.com/cn/download_61.html,下载那个播放库和网路的,然后会用到几个.h文件,然后加在cmakelists.txt里面就行了。
怎么说呢,虽然花费了这么长时间,但是对海康的库有了个大体的认知了吧。
然后经过2天得到调试可算将图像显示出来了,但是还没有转成mat对象,这个一会再说,先说下我是怎么调出来的吧!首先必须下载一个软件,直接下linux的,然后的话就是这个页面:

然后的话就是连接,之后最重要的就是调各种参数,然后一定要保存,之后再用display这个案例就好使了,然后下一步就是调为mat对象了,但是我的那个代码有问题就是解出来图像有问题,代码的问题?去看看去。不过说一句,开始时觉得海康的不行吧,但是后来的话会用之后感觉还是可以的!
我突然想到个事,就是在识别后要用将图像传到网络上去,我差点忘了,然后的话就是要也要学习一下网络相机哪方面的东西,一步步来吧!
网络摄像头:想弄明白这个得先知道网络摄像头的工作原理:网络摄像头是传统摄像机与网络视频技术相结合的新一代产品,除了具备一般传统摄像机所有的图像捕捉功能外,机内还内置了数字化压缩控制器和基于WEB的操作系统,使得视频数据经压缩加密后,通过局域网,internet或无线网络送至终端用户。
最后发现根本用不到,然后的话最后我借鉴了opencv和海康的官方例子最后成功的解决了,下面我放上我的代码:
#include<stdio.h>
#include<iostream>
#include <string.h>
#include <unistd.h>
#include "opencv2/opencv.hpp"
#include <stdlib.h>
#include "/home/dji/文档/MVS/include/MvCameraControl.h"
#include "/home/dji/文档/MVS/include/PlayM4.h"
#include "/home/dji/文档/MVS/include/plaympeg4.h"
#include "/home/dji/文档/MVS/include/HCNetSDK.h"
#include <cstdio>
#include <cstring>
#include <time.h>
#define USECOLOR 1
#include <ctime>
clock_t begin2, end2,end3,end4;
using namespace std;
using namespace cv;
/***************************************************************************************************
*
* Notes about how to configure your OpenCV environment and project.
* 1. You can prepare the required installation package from the official website. https://opencv.org/releases.html
* 2. If the *.lib files doesn't exist in the package download, you need to compile by yourself with the CMake tool.
* 3. Add the 'bin' folder path to the PATH.
* 4. Configure the 'Additional Include Directories', 'Additional Library Directories' and 'Additional Dependencies' for current project property.
*
* If there is any question or request, please feel free to contact us.
***************************************************************************************************/
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
#include "string.h"
unsigned int g_nPayloadSize = 0;
enum CONVERT_TYPE
{
OpenCV_Mat = 0, // Most of the time, we use 'Mat' format to store image data after OpenCV V2.1
OpenCV_IplImage = 1, //we may also use 'IplImage' format to store image data, usually before OpenCV V2.1
};
// print the discovered devices information to user
bool PrintDeviceInfo(MV_CC_DEVICE_INFO* pstMVDevInfo)
{
if (NULL == pstMVDevInfo)
{
printf("The Pointer of pstMVDevInfo is NULL!\\n");
return false;
}
if (pstMVDevInfo->nTLayerType == MV_GIGE_DEVICE)
{
int nIp1 = ((pstMVDevInfo->SpecialInfo.stGigEInfo.nCurrentIp & 0xff000000) >> 24);
int nIp2 = ((pstMVDevInfo->SpecialInfo.stGigEInfo.nCurrentIp & 0x00ff0000) >> 16);
int nIp3 = ((pstMVDevInfo->SpecialInfo.stGigEInfo.nCurrentIp & 0x0000ff00) >> 8);
int nIp4 = (pstMVDevInfo->SpecialInfo.stGigEInfo.nCurrentIp & 0x000000ff);
// print current ip and user defined name
printf("CurrentIp: %d.%d.%d.%d\\n" , nIp1, nIp2, nIp3, nIp4);
printf("UserDefinedName: %s\\n\\n" , pstMVDevInfo->SpecialInfo.stGigEInfo.chUserDefinedName);
}
else if (pstMVDevInfo->nTLayerType == MV_USB_DEVICE)
{
printf("UserDefinedName: %s\\n", pstMVDevInfo->SpecialInfo.stUsb3VInfo.chUserDefinedName);
printf("Serial Number: %s\\n", pstMVDevInfo->SpecialInfo.stUsb3VInfo.chSerialNumber);
printf("Device Number: %d\\n\\n", pstMVDevInfo->SpecialInfo.stUsb3VInfo.nDeviceNumber);
}
else
{
printf("Not support.\\n");
}
return true;
}
int RGB2BGR( unsigned char* pRgbData, unsigned int nWidth, unsigned int nHeight )
{
if ( NULL == pRgbData )
{
return MV_E_PARAMETER;
}
for (unsigned int j = 0; j < nHeight; j++)
{
for (unsigned int i = 0; i < nWidth; i++)
{
unsigned char red = pRgbData[j * (nWidth * 3) + i * 3];
pRgbData[j * (nWidth * 3) + i * 3] = pRgbData[j * (nWidth * 3) + i * 3 + 2];
pRgbData[j * (nWidth * 3) + i * 3 + 2] = red;
}
}
return MV_OK;
}
// convert data stream in Mat format
bool Convert2Mat(MV_FRAME_OUT_INFO_EX* pstImageInfo, unsigned char * pData)
{
cv::Mat srcImage;
if ( pstImageInfo->enPixelType == PixelType_Gvsp_Mono8 )
{
srcImage = cv::Mat(pstImageInfo->nHeight, pstImageInfo->nWidth, CV_8UC1, pData);
//imshow("1",srcImage);
//waitKey(10);
}
else if ( pstImageInfo->enPixelType == PixelType_Gvsp_RGB8_Packed )
{
RGB2BGR(pData, pstImageInfo->nWidth, pstImageInfo->nHeight);
srcImage = cv::Mat(pstImageInfo->nHeight, pstImageInfo->nWidth, CV_8UC3, pData);
//imshow("1",srcImage);
//waitKey(10);
}
else
{
printf("unsupported pixel format\\n");
return false;
}
if ( NULL == srcImage.data )
{
return false;
}
srcImage.release();
return true;
}
// convert data stream in Ipl format
bool Convert2Ipl(MV_FRAME_OUT_INFO_EX* pstImageInfo, unsigned char * pData)
{
IplImage* srcImage = NULL;
if ( pstImageInfo->enPixelType == PixelType_Gvsp_Mono8 )
{
srcImage = cvCreateImage(cvSize(pstImageInfo->nWidth, pstImageInfo->nHeight), IPL_DEPTH_8U, 1);
}
else if ( pstImageInfo->enPixelType == PixelType_Gvsp_RGB8_Packed )
{
RGB2BGR(pData, pstImageInfo->nWidth, pstImageInfo->nHeight);
srcImage = cvCreateImage(cvSize(pstImageInfo->nWidth, pstImageInfo->nHeight), IPL_DEPTH_8U, 3);
}
else
{
printf("unsupported pixel format\\n");
return false;
}
if ( NULL == srcImage )
{
printf("CreatImage failed.\\n");
return false;
}
srcImage->imageData = (char *)pData;
// save converted image in a local file
try {
cvSaveImage("IplImage.bmp", srcImage);
}
catch (cv::Exception& ex) {
fprintf(stderr, "Exception saving image to bmp format: %s\\n", ex.what());
}
cvReleaseImage(&srcImage);
return true;
}
int main()
{
int nRet = MV_OK;
void* handle = NULL;
// Enum device
MV_CC_DEVICE_INFO_LIST stDeviceList;
memset(&stDeviceList, 0, sizeof(MV_CC_DEVICE_INFO_LIST));
nRet = MV_CC_EnumDevices(MV_GIGE_DEVICE | MV_USB_DEVICE, &stDeviceList);
if (MV_OK != nRet)
{
printf("Enum Devices fail! nRet [0x%x]\\n", nRet);
}
if (stDeviceList.nDeviceNum > 0)
{
for (unsigned int i = 0; i < stDeviceList.nDeviceNum; i++)
{
printf("[device %d]:\\n", i);
MV_CC_DEVICE_INFO* pDeviceInfo = stDeviceList.pDeviceInfo[i];
if (NULL == pDeviceInfo)
{
break;
}
PrintDeviceInfo(pDeviceInfo);
}
}
else
{
printf("Find No Devices!\\n");
}
unsigned int nFormat = 0;
// select device to connect
printf("Please Input camera index(0-%d):", stDeviceList.nDeviceNum-1);
unsigned int nIndex = 0;
// Select device and create handle
nRet = MV_CC_CreateHandle(&handle, stDeviceList.pDeviceInfo[nIndex]);
if (MV_OK != nRet)
{
printf("Create Handle fail! nRet [0x%x]\\n", nRet);
}
// open device
nRet = MV_CC_OpenDevice(handle);
if (MV_OK != nRet)
{
printf("Open Device fail! nRet [0x%x]\\n", nRet);
}
do
{
begin2 = clock();
// Detection network optimal package size(It only works for the GigE camera)
if (stDeviceList.pDeviceInfo[nIndex]->nTLayerType == MV_GIGE_DEVICE)
{
int nPacketSize = MV_CC_GetOptimalPacketSize(handle);
if (nPacketSize > 0)
{
nRet = MV_CC_SetIntValue(handle,"GevSCPSPacketSize",nPacketSize);
if(nRet != MV_OK)
{
printf("Warning: Set Packet Size fail nRet [0x%x]!", nRet);
}
}
else
{
printf("Warning: Get Packet Size fail nRet [0x%x]!", nPacketSize);
}
}
// Set trigger mode as off
/*nRet = MV_CC_SetEnumValue(handle, "TriggerMode", 0);
if (MV_OK != nRet)
{
printf("Set Trigger Mode fail! nRet [0x%x]\\n", nRet);
break;
}
*/
// Get payload size
MVCC_INTVALUE stParam;
memset(&stParam, 0, sizeof(MVCC_INTVALUE));
nRet = MV_CC_GetIntValue(handle, "PayloadSize", &stParam);
if (MV_OK != nRet)
{
printf("Get PayloadSize fail! nRet [0x%x]\\n", nRet);
}
g_nPayloadSize = stParam.nCurValue;
// Start grab image
nRet = MV_CC_StartGrabbing(handle);
if (MV_OK != nRet)
{
printf("Start Grabbing fail! nRet [0x%x]\\n", nRet);
}
MV_FRAME_OUT_INFO_EX stImageInfo = {0};
memset(&stImageInfo, 0, sizeof(MV_FRAME_OUT_INFO_EX));
unsigned char * pData = (unsigned char *)malloc(sizeof(unsigned char) * (g_nPayloadSize));
if (pData == NULL)
{
printf("Allocate memory failed.\\n");
}
// get one frame from camera with timeout=1000ms
nRet = MV_CC_GetOneFrameTimeout(handle, pData, g_nPayloadSize, &stImageInfo, 1000);
if (nRet == MV_OK)
{
printf("Get One Frame: Width[%d], Height[%d], nFrameNum[%d]\\n",
stImageInfo.nWidth, stImageInfo.nHeight, stImageInfo.nFrameNum);
}
else
{
printf("No data[0x%x]\\n", nRet);
free(pData);
pData = NULL;
break;
}
end3 = clock();
unsigned uRunTime2 = (end3 - begin2) * 1.0 / CLOCKS_PER_SEC * 1000;
cout<<"1:"<<uRunTime2<<endl;
// 数据去转换
bool bConvertRet = false;
if ( 0 == nFormat )
{
bConvertRet = Convert2Mat(&stImageInfo, pData);
}
else
{
bConvertRet = Convert2Ipl(&stImageInfo, pData);
}
// print result
if ( bConvertRet )
{
printf("OpenCV format convert finished.\\n");
free(pData);
pData = NULL;
}
else
{
printf("OpenCV format convert failed.\\n");
free(pData);
pData = NULL;
}
// Stop grab image
/*nRet = MV_CC_StopGrabbing(handle);
if (MV_OK != nRet)
{
printf("Stop Grabbing fail! nRet [0x%x]\\n", nRet);
break;
}*/
// Close device
/*nRet = MV_CC_CloseDevice(handle);
if (MV_OK != nRet)
{
printf("ClosDevice fail! nRet [0x%x]\\n", nRet);
break;
}*/
// Destroy handle
/*nRet = MV_CC_DestroyHandle(handle);
if (MV_OK != nRet)
{
printf("Destroy Handle fail! nRet [0x%x]\\n", nRet);
break;
}*/
end2 = clock();
unsigned uRunTime = (end2 - begin2) * 1.0 / CLOCKS_PER_SEC * 1000;
cout<<"3:"<<uRunTime<<endl;
} while (1);
if (nRet != MV_OK)
{
if (handle != NULL)
{
MV_CC_DestroyHandle(handle);
handle = NULL;
}
}
printf("Press a key to exit.\\n");
return 0;
}
然后的话是cmakelists.txt
project(fan)
CMAKE_MINIMUM_REQUIRED(VERSION 3.10)
find_package(OpenCV REQUIRED)
find_package(OpenCV QUIET COMPONENTS core highgui imgproc imgcodecs videoio)
AUX_SOURCE_DIRECTORY(./ DIR_SRCS)
include_directories(${OpenCV_INCLUDE_DIRS})
include_directories(/home/dji/文档/RM2021/capture/MVS/inlude)
link_directories(${OpenCV_LIBRARY_DIRS})
link_directories("/home/dji/文档/RM2021/capture/MVS/lib/aarch64")
link_libraries("/home/dji/文档/RM2021/capture/MVS/lib/aarch64/libMvCameraControl.so")
SET(EXECUTABLE_OUTPUT_PATH ${PROJECT_BINARY_DIR}/bin)
add_compile_options(-std=c++11)
#-Wall -Werror
ADD_EXECUTABLE(fan ${DIR_SRCS})
target_link_libraries(fan ${OpenCV_LIBS})
target_link_libraries(fan -lpthread -luuid -lMvCameraControl -lX11 )
target_link_libraries(fan libMvCameraControl.so)
以上是关于rm记录第三阶段:海康威视工业相机的使用,cmake的复习的主要内容,如果未能解决你的问题,请参考以下文章