STM32CubeMX | 39-使用硬件定时器获取超声波模块数据(HC-SR04)
Posted Mculover666
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了STM32CubeMX | 39-使用硬件定时器获取超声波模块数据(HC-SR04)相关的知识,希望对你有一定的参考价值。
本篇详细的记录了如何使用STM32CubeMX配置STM32L431RCT6的通用定时器外设,捕获超声波模块的距离信号。
本系列教程所编写的驱动源码:https://github.com/Mculover666/HAL_Driver_Lib,好用的话,记得点个Star呀!
1. 准备工作
硬件准备
首先需要准备一个开发板,这里我准备的是STM32L4的开发板(BearPi):
超声波模块使用HC-SR04,如图:
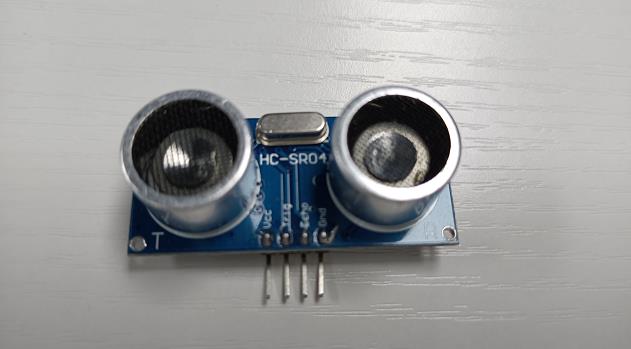
该模块的四个引脚说明如下表:
| 引脚名 | 引脚作用 |
|---|---|
| Vcc | 5V供电 |
| Trig | 触发控制信号输入 |
| Echo | 回响信号输出 |
| Gnd | 地 |
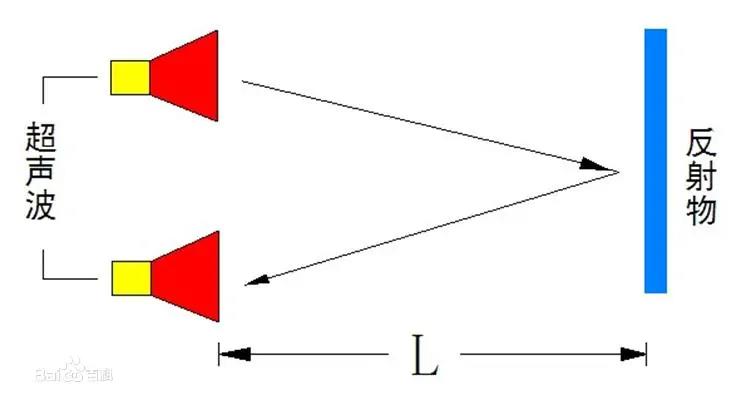
超声波模块测距原理
如图,超声波模块发出超声波信号,如果前方碰到障碍物,则被障碍物反射回来,模块收到回来的超声波后,即可计算出与障碍物的距离:
HR-SC04模块工作原理
HR-SC04模块的时序图如下:
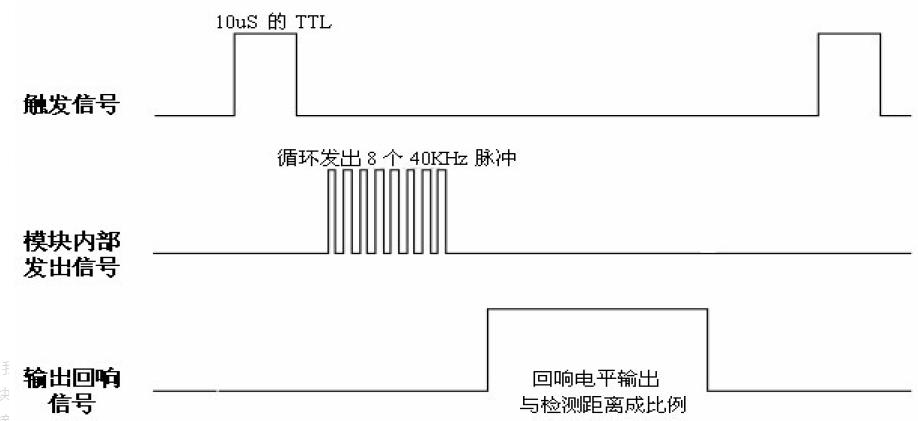
根据该时序图,可以看出一次测距的流程如下:
1.给超声波模块接入电源和地。
2.给脉冲触发引脚(trig)输入一个长为20us的高电平方波
3.输入方波后,模块会自动发射8个40KHz的声波,与此同时回波引脚(echo)端的电平会由0变为1;(此时应该启动定时器计时)
4.当超声波返回被模块接收到时,回波引 脚端的电平会由1变为0;(此时应该停止定时器计数),定时器记下的这个时间即为超声波由发射到返回的总时长。
5.根据声音在空气中的速度为344米/秒,即可计算出所测的距离。
- 触发信号由Trig引脚输入,10us的高电平即可触发一次测距;
- 触发后,距离信息由Echo引脚输出,该输出信号的高电平时间与检测距离成比例;
在整个测距过程中,最重要的是Echo引脚输出信号高电平的时间,可以使用STM32硬件定时器得到时长,这个时间为超声波从发射到接收的时长,由声速计算出传播距离,再取1/2,计算出当前距离障碍物的距离。
软件准备
- 需要安装好Keil - MDK及芯片对应的包,以便编译和下载生成的代码。
2.生成MDK工程
选择芯片型号
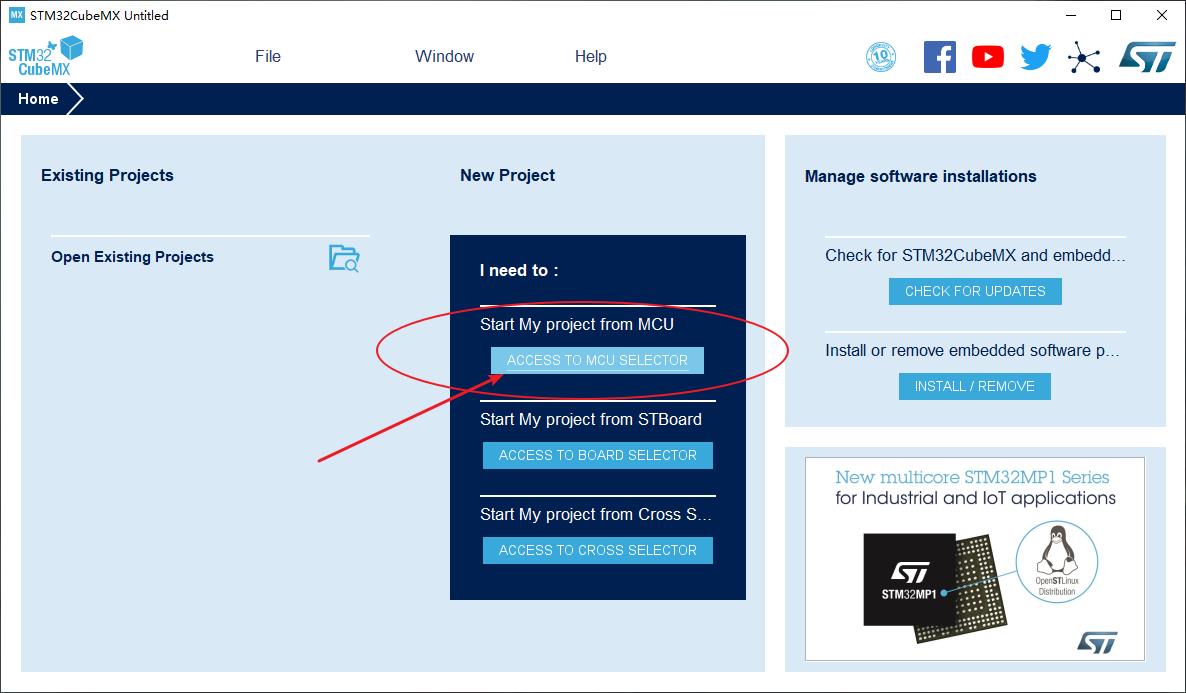
打开STM32CubeMX,打开MCU选择器:
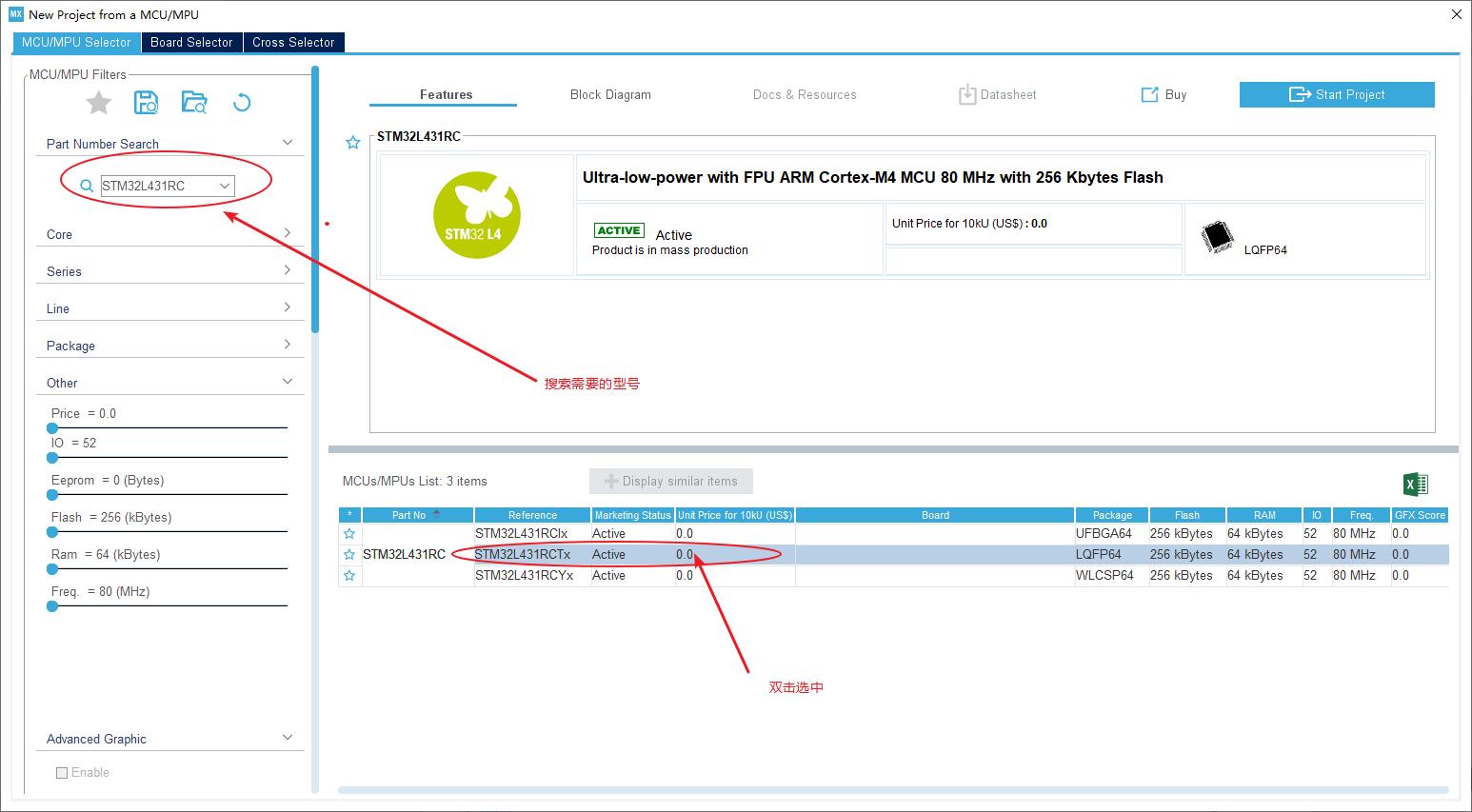
搜索并选中芯片STM32L431RCT6:
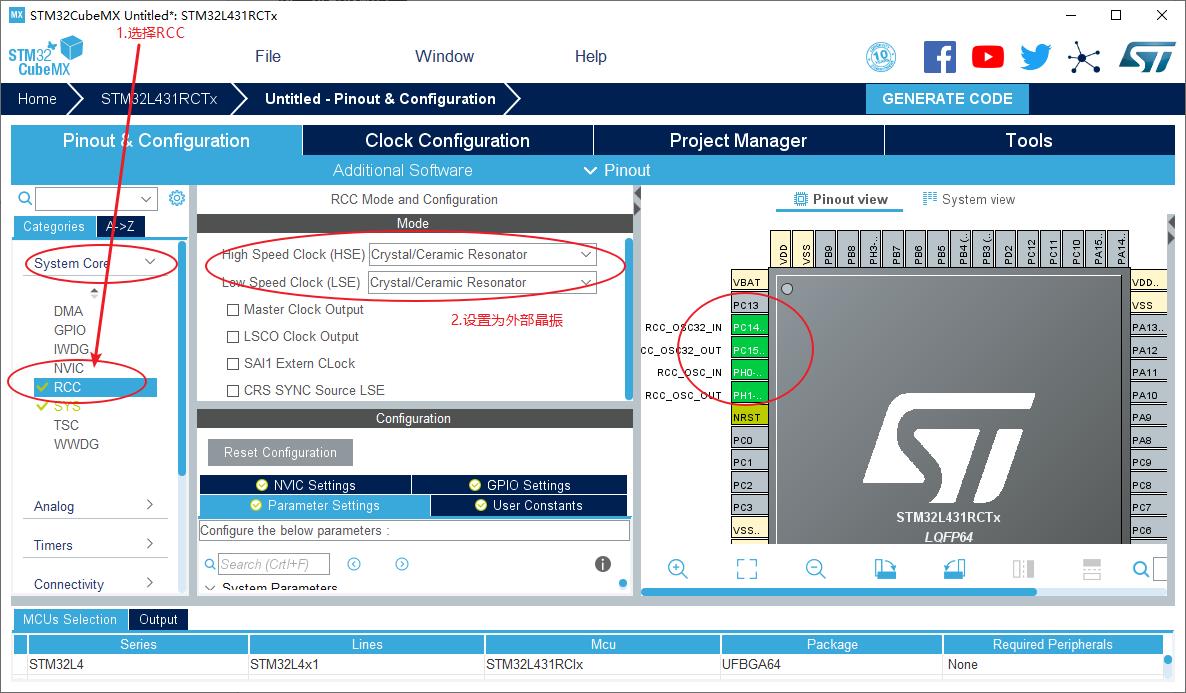
配置时钟源
- 如果选择使用外部高速时钟(HSE),则需要在System Core中配置RCC;
- 如果使用默认内部时钟(HSI),这一步可以略过;
这里我都使用外部时钟:
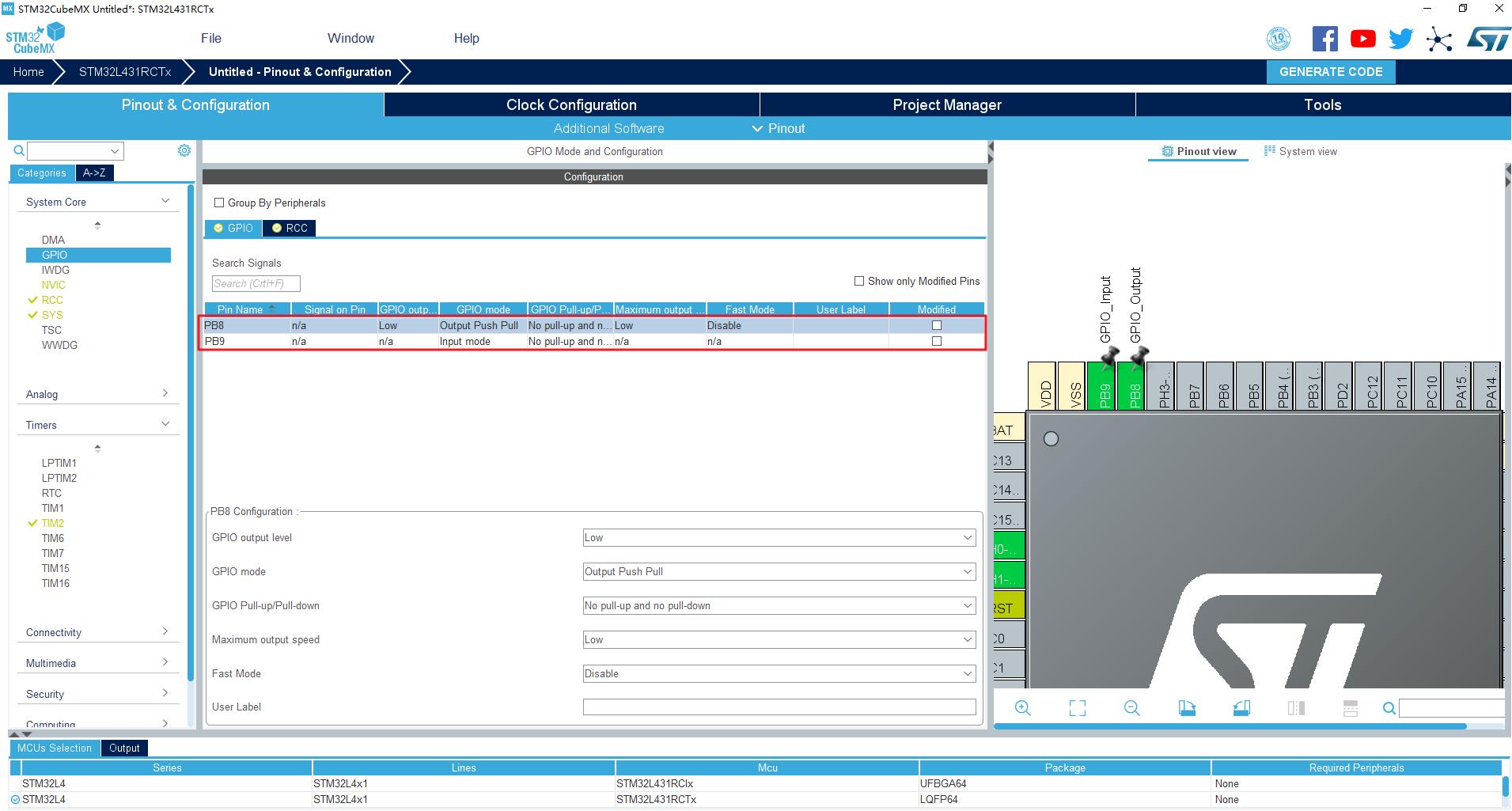
配置GPIO
配置两个普通的GPIO,一个配置为输出模式,用于连接模块的Trig引脚,触发一次测距,这里我配置为PB8,另一个配置为输入模式(浮空),用于连接模块的Echo引脚,接收echo信号,这里我配置为PB9。
配置通用定时器TIM2
知识小卡片——STM32L431的定时器
STM32L431xx 系列有 1 个高级定时器(TIM1), 3 个通用定时器(TIM2、TIM15、TIM16),两个基本定时器(TIM6、TIM7),还有两个低功耗定时器(LPTIM1、LPTIM2)。
STM32L431 的通用 TIMx (TIM2、TIM15、TIM16)定时器功能包括:
-
16 位(TIM15,TIM16)/32 位(TIM2)向上、向下、向上/向下自动装载计数器,注意:
TIM15、TIM16 只支持向上(递增)计数方式; -
16 位可编程(可以实时修改)预分频器,计数器时钟频率的分频系数为 1~65535 之间的任
意数值。 -
4 个独立通道(TIMx_CH1~4, 其中 TIM15 最多 2 个通道, TIM16 最多 1 个
通道),这些通道可以用来作为:- 输入捕获
- 输出比较
- PWM 生成(边缘或中间对齐模式)
- 单脉冲模式输出
-
可使用外部信号控制定时器和定时器互连的同步电路。
-
如下事件发生时产生中断/DMA:
- 更新:计数器向上溢出/向下溢出,计数器初始化(通过软件或者内部/外部触发)
- 触发事件(计数器启动、停止、初始化或者由内部/外部触发计数)
- 输入捕获
- 输出比较
知识小卡片结束啦~
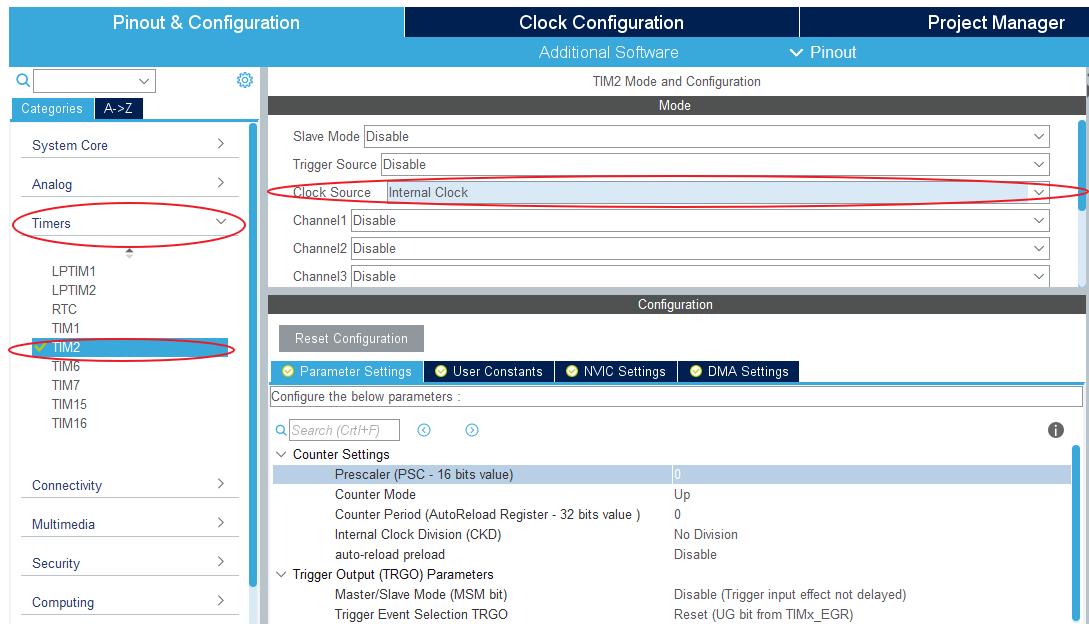
接下来开始配置TIM2,首先选择TIM2,时钟源选择内部时钟:
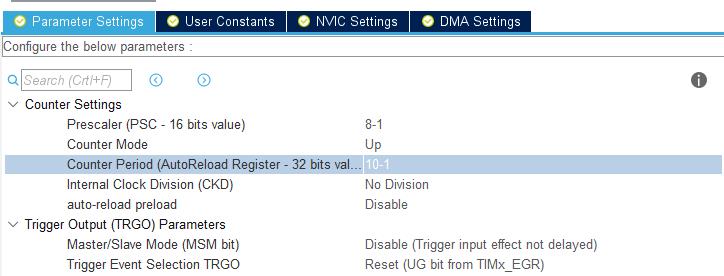
接下来是对TIM2的参数设置,参照数据手册中的RCC时钟树,TIM2内部时钟来源是PCLK1 = 80Mhz,我们的目的是每1us产生一次中断(1Mhz),所以预分频系数设置为8,自动重载值为10,得到的计时器更新中断频率即为80000000/8/10=1000000Hz=1MHz:
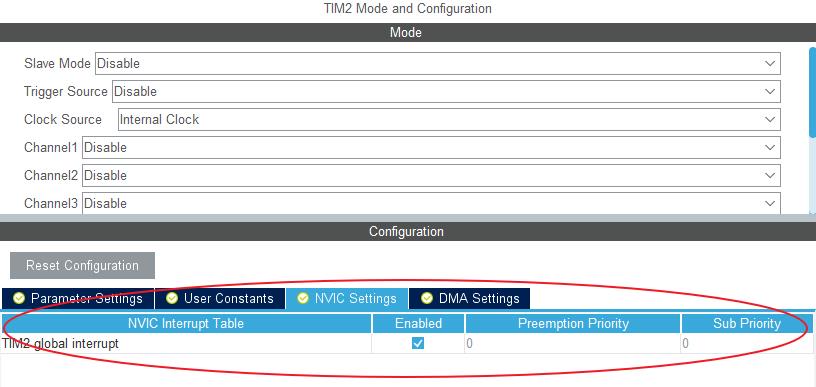
其余的一些设置保持默认即可,最后开启TIM2中断:
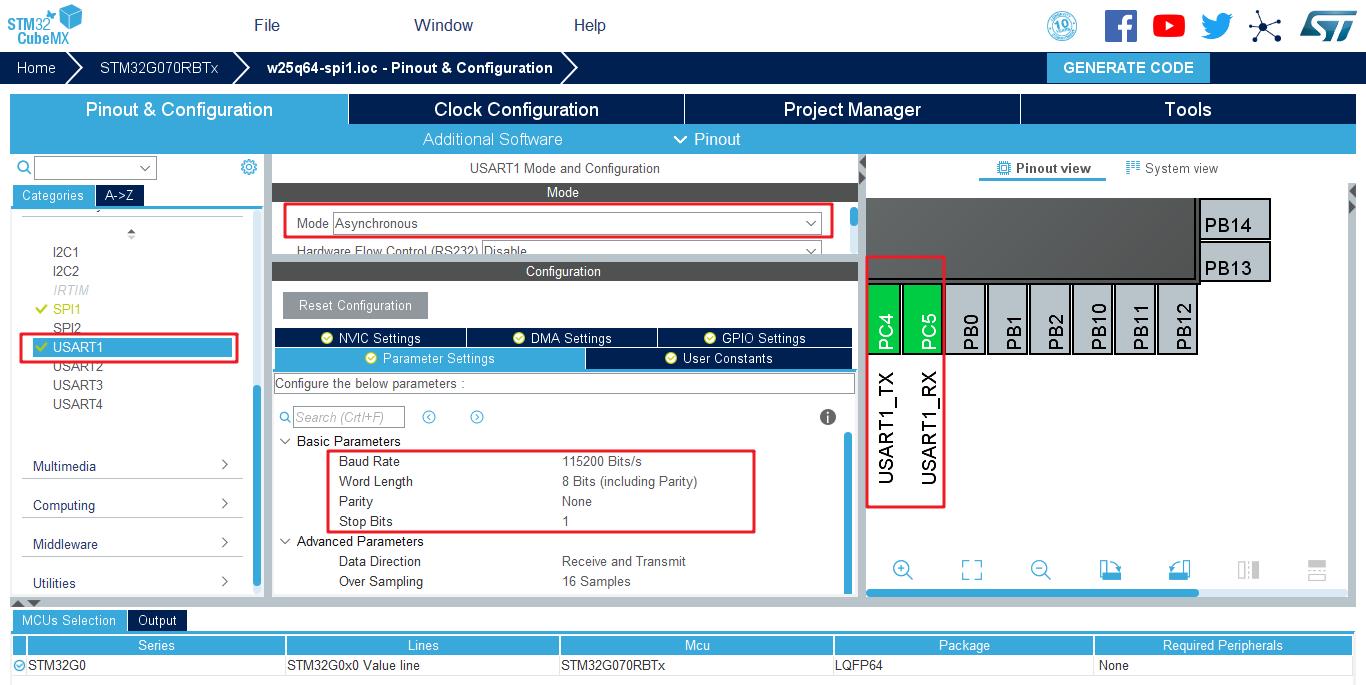
配置串口
开发板板载了一个CH340换串口,连接到USART1。
接下来开始配置USART1:
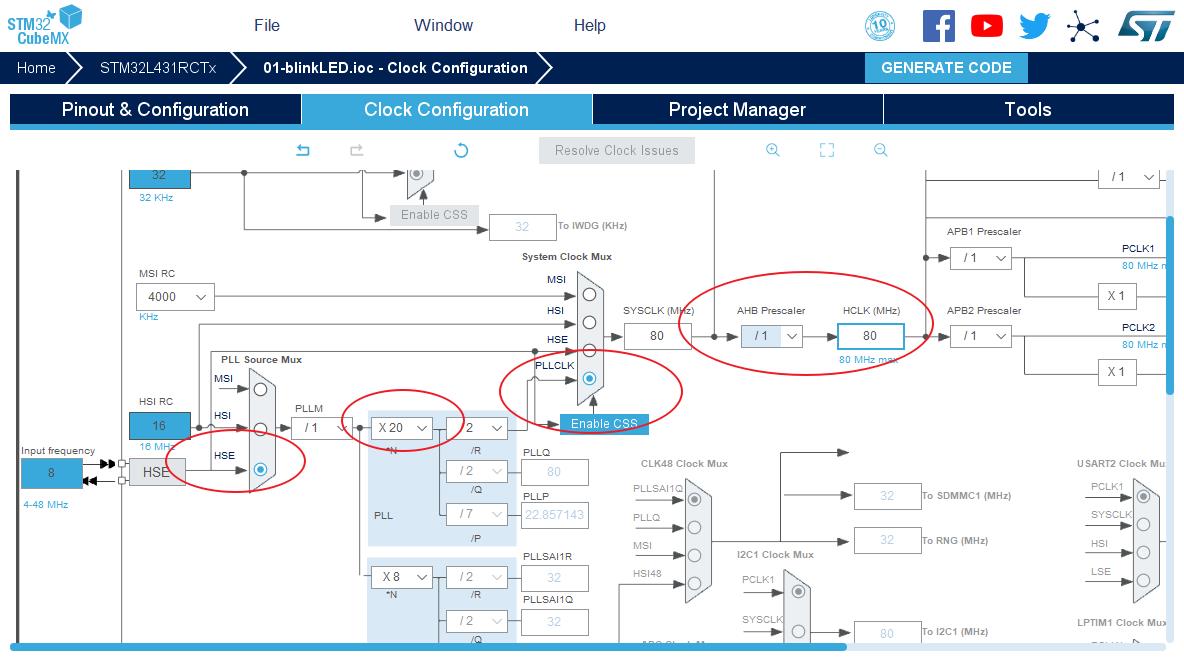
配置时钟树
STM32L4的最高主频到80M,所以配置PLL,最后使HCLK = 80Mhz即可:
生成工程设置
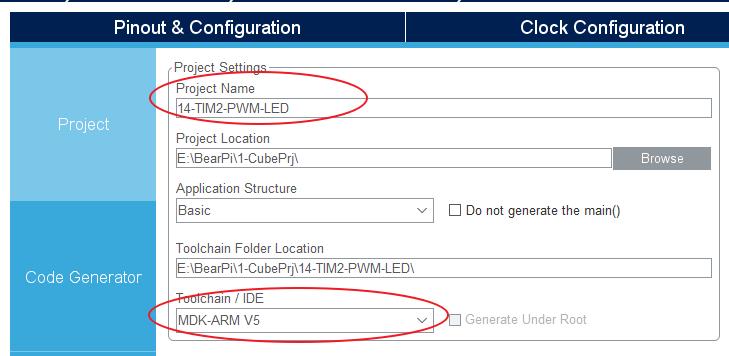
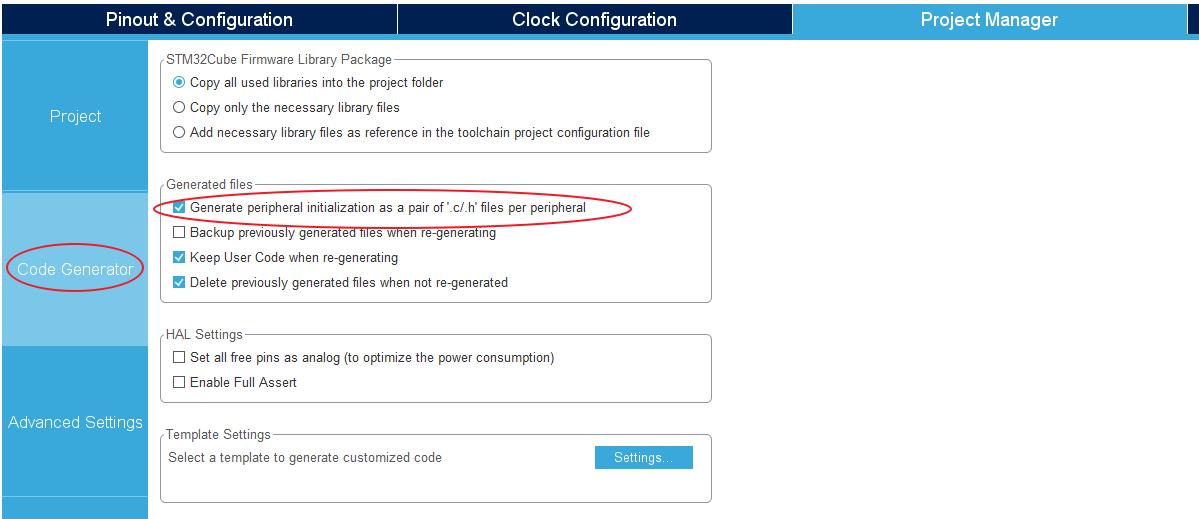
代码生成设置
最后设置生成独立的初始化文件:
生成代码
点击GENERATE CODE即可生成MDK-V5工程:

3. 在MDK中编写、编译、下载用户代码
1. printf重定向
STM32CubeMX_09 | 重定向printf函数到串口输出的多种方法
2. 添加us级延时函数
3. 编写驱动
HC_SR04.h
/**
* @Copyright (c) 2021,mculover666 All rights reserved
* @filename HC_SR04.c
* @breif Drive HC_SR04 based on stm32 tim peripheral
* @changelog v1.0 mculover666 2021/5/9
*/
#ifndef _HC_SR04_H_
#define _HC_SR04_H_
#include "stm32l4xx.h"
#include "core_delay/core_delay.h"
/* HC-SR04模块控制引脚 */
#define HC_SR04_TRIG_PORT GPIOB
#define HC_SR04_TRIG_PIN GPIO_PIN_8
#define HC_SR04_ECHO_PORT GPIOB
#define HC_SR04_ECHO_PIN GPIO_PIN_9
/* us级延时函数 */
#define HC_SR04_Delay_Us(n) CPU_TS_Tmr_Delay_US(n)
/* us级硬件定时器 */
#define HC_SR04_TIM htim2
void HC_SR04_Init(void);
int HC_SR04_Measure(double *distance_cm);
#endif /* _HC_SR04_H_ */
HC_SR04.c
/**
* @Copyright (c) 2021,mculover666 All rights reserved
* @filename HC_SR04.c
* @breif Drive HC_SR04 based on stm32 tim peripheral
* @changelog v1.0 mculover666 2021/5/9
*/
#include "HC_SR04.h"
#include <stdio.h>
extern TIM_HandleTypeDef HC_SR04_TIM;
static uint32_t high_level_time_us;
/**
* @brief GPIO and TIM initialization.
* @param none
* @return none
*/
void HC_SR04_Init(void)
{
// it is initialized in main function
}
/**
* @brief Send trig signal.
* @param none
* @return none
*/
static void HC_SR04_Start(void)
{
/* output high level */
HAL_GPIO_WritePin(HC_SR04_TRIG_PORT, HC_SR04_TRIG_PIN, GPIO_PIN_SET);
/* maintain high level at least 10us */
HC_SR04_Delay_Us(10);
/* resume low level */
HAL_GPIO_WritePin(HC_SR04_TRIG_PORT, HC_SR04_TRIG_PIN, GPIO_PIN_RESET);
}
/**
* @brief Measure the high level time of the echo signal.
* @param none
* @return errcode
* @retval 0 success
* @retval -1 fail
*/
int HC_SR04_Measure(double *distance_cm)
{
uint32_t timeout_start, timeout_cur;
HC_SR04_Start();
/* waitting for start of the high level through echo pin */
timeout_start = HAL_GetTick();
while (HAL_GPIO_ReadPin(HC_SR04_ECHO_PORT, HC_SR04_ECHO_PIN) == GPIO_PIN_RESET) {
// timeout check code to avoid blocking
timeout_cur = HAL_GetTick();
if (timeout_cur - timeout_start > 100) {
//100ms timeout
return -1;
}
}
/* start the tim and enable the interrupt */
high_level_time_us = 0;
HAL_TIM_Base_Start_IT(&HC_SR04_TIM);
/* waitting for end of the high level through echo pin */
timeout_start = HAL_GetTick();
while (HAL_GPIO_ReadPin(HC_SR04_ECHO_PORT, HC_SR04_ECHO_PIN) == GPIO_PIN_SET)
{
// timeout check code to avoid blocking
timeout_cur = HAL_GetTick();
if (timeout_cur - timeout_start > 100) {
//100ms timeout
return -1;
}
}
/* stop the tim */
HAL_TIM_Base_Stop(&HC_SR04_TIM);
/* calc distance in unit cm */
*distance_cm = (double)(high_level_time_us/1000000.0) * 340.0 / 2.0 *100.0;
return 0;
}
/**
* @brief Realize the callback function of TIM.
*/
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef* tim_baseHandle)
{
if(tim_baseHandle->Instance == HC_SR04_TIM.Instance)
{
high_level_time_us++;
}
}
测试结果
在main.c中包含驱动头文件:
#include <stdio.h>
#include "core_delay.h"
#include "HC_SR04.h"
在main函数中创建变量:
/* USER CODE BEGIN 1 */
double distance_cm;
/* USER CODE END 1 */
编写测试代码:
/* USER CODE BEGIN 2 */
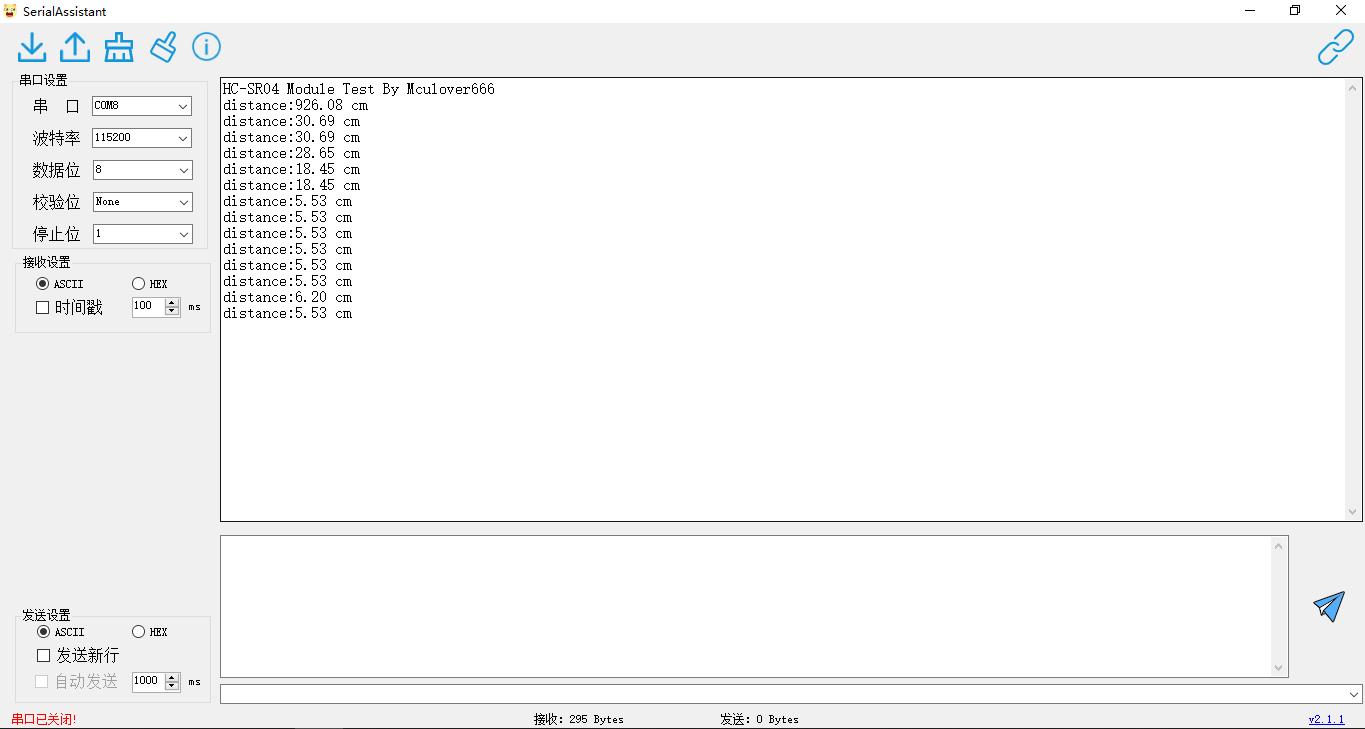
printf("HC-SR04 Module Test By Mculover666\\r\\n");
HC_SR04_Init();
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
if (HC_SR04_Measure(&distance_cm) == 0)
{
printf("distance:%.2f cm\\r\\n", distance_cm);
}
else
{
printf("measure fail\\r\\n");
}
HAL_Delay(1000);
}
/* USER CODE END 3 */
测试结果为:
更多精彩文章及资源,请关注我的微信公众号:『mculover666』。
以上是关于STM32CubeMX | 39-使用硬件定时器获取超声波模块数据(HC-SR04)的主要内容,如果未能解决你的问题,请参考以下文章
STM32G070RBT6基于STM32CubeMX创建定时器中断控制LED闪烁