两所大学中的智能车竞赛校内赛
Posted 卓晴
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了两所大学中的智能车竞赛校内赛相关的知识,希望对你有一定的参考价值。

简 介: 第十六届全国大学生智能车竞赛将会在2021年暑期举行。首先是在7月份进行各个分赛区比赛,8月将会在哈尔滨工程大学举办全国总决赛。现在各个学校分别举办了校内的比赛,以期检验同学们车模作品制作进展情况,加强交流学习,为暑期比赛打下基础。下面分别展示了西安邮电大学、青岛农业大学校内赛的部分录像片段。
关键词: 全国大学生智能车竞赛,西安邮电大学,校内赛,基础组,全向组,双车组,节能信标组,室外越野,单车拉力,视觉AI
01 西安邮电大学校内赛
1.公众号留言提问
昨天在公众号TSINGHUAZHUOQING留言中看到同学提出了一个问题:
卓大大,前几天西安邮电大学有学生发布了他们的校赛视频,我看见越野组里有人在过九十度角的时候,冲出角后进行了倒退,请问这样符合规则吗。规则中所述行进方向限定前行是指不能倒退吧 ?
附视频链接https://b23.tv/FfZo2C
根据留言中的视频B站链接,看到了这段西安邮电大学智能车校内赛的录像剪辑。

▲ 西安邮电大学第 十六届智能车竞赛校内赛
习惯的力量可真大!看到西安邮电大学校内选拔赛室外横幅上还写着“NXP”杯智能车竞赛,这是前14届比赛的冠名了。从第十五届开始,全国大学生智能车竞赛就不再冠名某一家赞助公司的名称了。
下面就看看录像剪辑中每个组别的比赛情况吧。
2.基础四轮组
相比与往届赛题内容,在普通的四轮组别中,竞赛要求有了以下几点主要变化:
- 车模要求使用阿克曼结构的B车模;
- 控制芯片要求使用Infineon公司的芯片
- 赛道上出现了三岔路口,要求车模运行两圈分别走三岔路口的两个支路。
此外,车模还应该完成出库入库的动作。看到西安邮电大学比赛现场,第一个印象就是他们的比赛场地很大,其中包括了一大一小两个环岛元素。而且赛道元素衔接非常考究。

▲ 基础四轮组
但是在录像中没有显示出这个车模是否运行两周?
3.全向行进组
全向行进组使用的H型车模,具有四个麦克纳姆轮驱动,可以完成前后左右四个方向的运行机制,在三岔路口进行转向。
下图显示了比赛中的车模顺畅完成三岔路口转向控制。车模在经过小的环岛动作也非常干净利索。
▲ 全向行进组过三岔路口
由于H车模底盘较低,所以对于较高的坡道有一定的挑战。下面动图显示了该车模通过比赛赛道上的坡道的情形。

▲ 全向组过坡道
4.双车接力组
在室内组别中,要求较高的是双车接力组。它需要分别使用三轮车模、双轮直立车模完成在三岔路口处对接力球的交接过程。
原来录像中明显是经过剪辑处理。前一段是校赛比赛录像,后一段则使用调试时的录像。它采用三轮车模出发,将球传递给直立车模的方案。

▲ 双车接力组1
比赛中包括了两支接力队伍。下面显示了是第二组队伍进行三岔路口交接的过程。等待的直立车模在接到传递球之后,被三轮车推着行进了一段距离之后,在起身继续运行。
▲ 双车接力组2
5.室内AI视觉组
从录像显示的西安邮电大学的室内AI视觉组只是进行了三岔路口的数字识别。没有演示对于动物和水果图案的识别过程。可能现在队伍还没有完全实现相应的功能。
车模使用C车模,通过视觉判断进入三岔路口之后,对于前方图片的数字进行识别之后,选择正确的三岔路口进行转向。
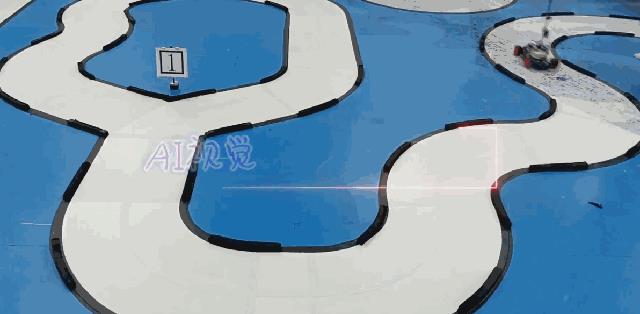
▲ AI视觉组
6.电磁AI越野组
录像中给出了两个片段室外电磁AI越野组运行的情景。第一个片段显示的是他们在夜间在室外调试越野车膜的情况。
反正电磁组不需要光线,所以在夜间调试,室外天气比较凉爽。
▲ 夜间行进的AI电磁越野组
第二段录像应该是正式比赛的画面了。令人震撼的硕大广袤室外电磁组场地,整个环形赛道极其复杂。也显示了西安邮电大学的队伍在平时训练和调试中,专门选择这样的“魔鬼赛道 ”来要求自己,使其车模达到尽善尽美。

▲ 白天室外电磁越野组
录像中引起大家争议的地方就是,车模在路过急转弯的地方,由于车模转弯半径较大,车模容易冲出赛道。但聪明的同学们,则是利用了局部倒车的技术使得车模能够重新回到正确的导航赛道上来,这一点实属不易,令人赞叹。
在之前的比赛中,使用这种技术来通过急转弯的方案还没有出现过。西安邮电大学的这种室外赛道方案值得竞赛秘书处参考。

▲ 前前进进的AI车模
7.节能信标组
节能信标组是今年最具有挑战性的组别。除了它要求参赛队伍在车模的机械制作、无线电能接收、目标检测和路径优化方面整体进行考虑,最终主要的一个因素,就是同学们拿到比赛所使用的信标灯已经是今年四月之后了。
看到同学们在这短短的时间内做出这样的调试成果实数不容易。

▲ 无线节能信标组
在博文 吹灭蛋糕上蜡烛的节能小车 展示了山东威海大学节能组同学的车模作品调试情况。据他们说,他们车模,一个队员管硬件,两个队员管软件。从放寒假开始变一直优化合理的算法,进而可以获得比较稳定的车模运行效果。
8.单车拉力组
单车车模是今年第一次引入比赛。在调试方面它比起其它组别都要困难。所谓的拉力组,指的是两方面的内容,是它考察车模运行的速度和稳定性。对于赛道要求不高,比如没有三岔路口,没有环岛等。
下面动图显示了西安邮电大学的单车车模能够完成一个较为复杂的赛道运行。不过录像没有完整展现整个运行过程,所以我们无法得知当时是否这个车模在这个赛道上跑完了。

▲ 单车拉力组
近期一直有同学在询问,单车赛道的细则。我想上面动图中显示的这个赛道就应该距离比赛所使用的赛道很接近,不会再难了。
完整的视频可以在B站(https://b23.tv/FfZo2C)观看,也可以观看下面的录屏视频。
西安邮电大学第十六届智能车竞赛
02 青岛农业大学大学校内赛
1.现场比赛场景
今天上午在朋友圈看到青岛农业大学智能车校内赛的录像片段。他们的场地很大。不过好像没有设置今年特有的三岔路口元素,也没有设置车库元素。
比赛中的电磁车模运行速度很快,不过对于第一个车环岛元素并没有完成,而是直接路过。其它的赛道元素则非常顺利的全部完成了。

▲ 青岛农业大学校内智能车竞赛
不过这不重要,下面才是重点。我们看到这辆车模的主人是一位女生,很可惜,这个录像中就没有给她一个正面的特写。

▲ 参赛的女同学

▲ 智能车发车前瞬间
2.比赛的其它组别
除了正规的全国大学生智能车的赛道之外,现场还设置了其它的有趣的比赛场地。下面让我们来看看吧。

▲ 赛场中的另外一块场地

▲ 纯电磁组赛道

▲ 在大型农机前的智能小车显得那么渺小
下面是比赛的视频内容:
校内赛
■ 相关文献链接:
以上是关于两所大学中的智能车竞赛校内赛的主要内容,如果未能解决你的问题,请参考以下文章