V2X车路协同云控数据平台业务整理
Posted a little daily
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了V2X车路协同云控数据平台业务整理相关的知识,希望对你有一定的参考价值。
目录
V2X即Vehicle-to-Everything,是智能汽车和智能交通的支撑技术之一;首先我们要明确梳理该篇文章能够达到哪些目标?清楚【V2X车路协同云控数据平台】是做什么的?为什么需要?如何去做?(wwh的问题what\\why\\how)肯定是必选项;
其次我们还要清楚需要解决的核心问题有哪些:
- 车端和路侧与云端控制平台数据的上下行整体通路是怎样的?(智能路侧&自动驾驶车感知设备<—>v2x边缘云计算<—>v2x中心云数据平台—>高精地图&百度地图&车载设备)
- 车路协同相关的数据对象有哪些?(静态数据:sensor|rscu等设备信息;动态准实时数据:融合感知交通参与对象&交通事件&设备在线数据)
- 如何支撑车端和路侧各类sensor感知检测数据的高频率、准实时接入到云端平台,并进一步进行融合服务各类业务?(上行通路)
- 云端平台如何稳定输出数据到可视化的高精地图、智能网联(车载设备)、公众出行(百度地图)等服务?(数据输出通路)
- mqtt\\flink\\tsdb\\bos\\kafka等技术组件再中间承担的重要作用以及核心技术方案有什么?(通信|业务计算|数据存储&转发)
v2x车路协同云控平台的WWH问题
1、关于v2x的简单理解&思考
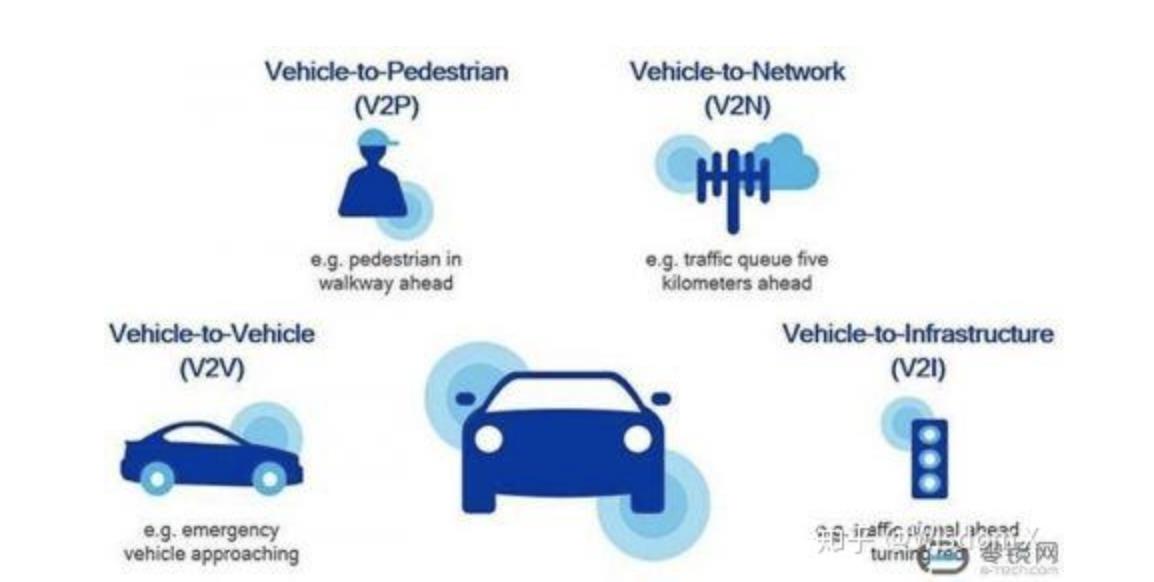
v2x主要包含vehicle-to-vehicle (V2V), vehicle-to-infrastructure (V2I), vehicle-to-network (V2N)以及vehicle-to-pedestrian (V2P)。其希望实现车辆与一切可能影响车辆的实体实现信息交互,所以包含了车辆与车辆、与路侧设备、与网络、与人的交互感知;我们可以理解为一种规定的车与车、车与人、车与路之间要实现通信的标准;如果我们实现了这种标准的话,L5级的自动驾驶实现起来会很容易,现有自动驾驶车辆的传感器就可以大大减少(目前只能达到L2~L4级别自动驾驶);
- 车车通信能够计算车辆之间的距离,不需要使用雷达等;
- 车路通信能够实现车辆在交叉路口与路侧设备以及信号灯的感知,那么车辆的摄像头可以减少一些;
- 车人通信能够让车辆知道行人在哪里,是否有可能产生碰撞等,同样可以减少雷达和摄像头的使用;
要全面实现V2X是及其困难的一件事
- 首先拿车车通信来说吧。V2X是基于5G标准的一个车联网标准,这就要求市面所有车辆全部具备5G通信能力,这意味着目前中国道路上跑的汽车全部不符合要求,那么把现有汽车全部换为具备5G通信能力的汽车,你可以想想需要多久?
- 再拿车路通信,那这要求所有的道路两旁以及交叉路口的信号灯也要具备5G通信能力,这就是国家一直所说的新基建,你可以评估这需要多久?(项目重点推进)
V2X的实现能够大大降低自动驾驶的难度,但V2X实现本身就是一件非常困难的事情。所以现有的自动驾驶方案都是通过大量的传感器来实现。我认为V2X是实现自动驾驶的必由之路,但需要等上几年。(理想与现实之间有一条很漫长的路在等待着!)
2、关于车路协同理解&思考
自动驾驶界已经逐渐达成的共识:
-
单从车端来看,车身搭载的传感器存在巨大短板,其视距较短,往往只有150-200米,FOV角也很有限,无法大范围感知道路环境,也难以识别重要路标,尤其是文字。如果要对于整个画面做计算的话,对于算力的要求会很高。另外,遮挡、恶劣天气等对于单车传感器的感知能力影响明显。鲁棒性、场景适应性、数据的准确性都会受到影响。(总结单车感知高成本、高技术壁垒)
- 如果路侧的同构感知设备等基础设施完成布局时,车端则可以摆脱部分昂贵的传感器,用后视镜、摄像头等相对简单的传感器保障基本安全,配合交叉路口的信号灯和路侧通信计算设备(RSCU|RSU)边缘计算分担计算压力,共同实现高级别的自动驾驶(总结车路协同)
- 车路协同主要涉及车端、路端和云端三个端口。路端会部署摄像头、毫米波雷达、激光雷达等多种传感器设备,这些设备与车端传感器是同构的,因此可以更方便地实现数据的传输与交互;
3、关于云控理解&思考
云端借助感应设备采集来的大数据进行数据处理分析、构建业务场景;万辆出租车一天就会上传数亿条 GPS 数据,加上车牌、监控等数据,交通有关的数据量级已经从 TB 等级跃升到了 PB 等级。
云端也可以分为中心云和边缘云,边缘云的作用是在数据最初级、最密集的边缘端提供具有云端计算能力的服务器(例如百度自研RSCU),是在最接近源头的地方将数据初步处理,同时也可以减轻中心云端的接入和运算压力,中心云与边缘云计算的结合可以将云计算的效率和成本发挥到最佳水平。
除了计算能力强,云端还可以对交通流做集中控制,构建起云控平台。同样在分析完所需要的数据后,根据云计算的结果,云平台也可以通过车路协同系统网络自动下发实施控制信号,实现全自动、全工况的动态交通系统控制。例如实时交通管理服务功能域中的交通控制子功能,当各个车辆上传的位置、速度以及方向等大数据通过云控平台的云计算系统,计算出一周中不同时段不同路段不同方向的车速及流量情况后,动态的计算出各个路口各个方向红绿灯的相位和时间,达到最优的通行速度,并将这些结果数据通过云控平台发送到各个路口的信号灯控制器,实施动态控制信号灯的绿信比,达到交通效率最优控制(其实是一种交通研判)。
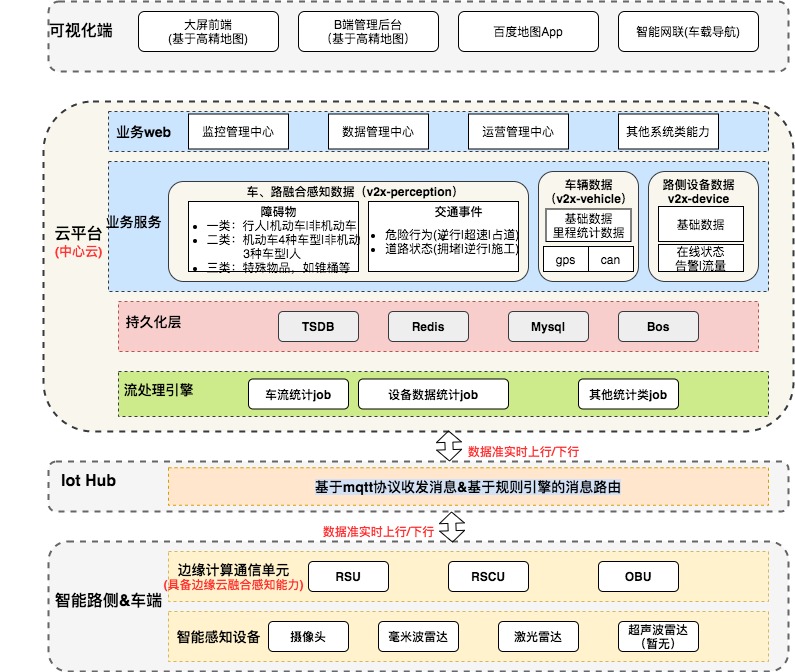
4、v2x车路协同云控平台的整体实现架构
总结前面所说传统的单车自动驾驶需要单车搭载大量的成本高昂感应器(毫米波|激光雷达、摄像头),即使这样单车感应也存在视距只有150~200m、FOV视角有限,无法大范围感知道路环境,也难识别路标、文字,恶略天气影响,如果需要对整个画面做感知计算的话,对于算力的要求也很高,所以利用V2I车路协同的理念(也是政府现在大力推动的新基建),在路侧150m间隔布置与车端同构的感知设备(毫米波|激光雷达、摄像头),车端则可以摆脱部分昂贵传感器,用后视镜、摄像头等相对简单的传感设备可保障基本安全;再配合部署路侧的RSCU|RSU具备通信、计算能力的(边缘云服务器)设备,实现传感器数据的采集和边缘云计算的能力;路侧RSCU最终将感知算法识别的数据输出到中心云(机房服务器)的各系统中做进一步的计算业务处理,边缘云和中心云结合将计算效率和成本发挥到最佳;同样中心云也会接收来自车端通信计算设备OBU一部分感知业务数据;【v2x车路协同云控数据平台】主要承担的就是中心云的能力,最终赋能到智能网联场景(例如百度的度小镜)、公众出行场景(百度地图app)以及交通监管业务(目前主要业务,结合高精地图实现的大屏前端+B端管理后台)
- 【V2X】依赖统一的路侧基础感应设施、车辆感应设备|定位通信设施、以及统一的网络模式;
- 【车路协同云控】通过部署于 路侧的RSCU|车端的OBU 提供边缘云的能力实现边缘感知计算、决策控制的能力;
- 【车路协同云控】中心云的负责将车端、路侧的融合感知数据、sensor设备数据进行采集、分析,最终应用到智能网联场景(例如百度的度小镜)、公众出行场景(百度地图app)以及交通监管业务(目前主要业务,结合高精地图实现的大屏前端+B端管理后台);
- 路漫漫其修远兮~~~~
车路协同云控数据平台相关数据对象
- 车路融合感知数据:障碍物&交通事件数据
- 车端车辆相关数据&路侧sensor设备相关数据:基础数据&车端GPS|CAN|里程统计数据&路侧各类sensor设备|RSU|RSCU通信计算设备在线状态|数据流量数据
5、中心云平台技术挑战-车路协同流计算引擎
- 各类实时高频(10hz+)车端、路侧感知障碍物数据、交通事件数据的融合、抽帧降频;
- 路侧设备的数据量实时统计、交通路口车流数据实时统计;
- 结合高精地图实现交通监管的大屏可视化需求,实现智能网联(度小镜)&公众出行场景(百度地图app)的数据输出对接需求;
参考:https://blog.csdn.net/a1290123825/article/details/109095241
6、博文参考
以上是关于V2X车路协同云控数据平台业务整理的主要内容,如果未能解决你的问题,请参考以下文章