ROS实验笔记之——基于EKF融合Visual-marker localization与IMU
Posted gwpscut
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS实验笔记之——基于EKF融合Visual-marker localization与IMU相关的知识,希望对你有一定的参考价值。
本博文实现了通过EKF融合之前博客《ROS实验笔记之——基于ArUco Marker来估算camera的位姿》实现的odometry数据(实际上为marker定位的结果)以及IMUdata
效果见如下视频
基于扩展卡尔曼滤波的Visual-marker与IMU融合定位
目录
源代码
注意这个包可能与“robot_localization-melodic-devel”相冲突了,故此需要重命名一下或者把原来的删掉~
ekf_node.cpp(详细的注释见代码备注)
#include <iostream>
#include <ros/ros.h>
#include <ros/console.h>
#include <sensor_msgs/Imu.h>
#include <sensor_msgs/Range.h>
#include <nav_msgs/Odometry.h>
#include <Eigen/Eigen>
using namespace std;
using namespace Eigen;
ros::Publisher odom_pub;
MatrixXd Q = MatrixXd::Identity(12, 12);//预测的噪声
MatrixXd Rt = MatrixXd::Identity(6,6);//测量的噪声
//定义状态与协方差
VectorXd X_t=VectorXd::Zero(15);//类似于EKF包,
//x, y, z,
//roll, pitch, yaw,
//vx, vy, vz,
//vroll, vpitch, vyaw,
//ax, ay, az
MatrixXd Var_t = MatrixXd::Identity(15, 15);
//Rotation from the camera frame to the IMU frame
Eigen::Matrix3d Rcam;
//时间
double last_time=-1;
//重力加速度
double g=9.8;
//*********************************************************
//引入 inline 关键字的原因 在 c/c++ 中,为了解决一些频繁调用的小函数大量消耗栈空间(栈内存)的问题,
// 特别的引入了 inline 修饰符,表示为内联函数。
inline Eigen::Vector3d rotationMatrix2EulerVector_zxy(Eigen::Matrix3d R)
{
Eigen::Vector3d xyz_vector;
double phi = asinf64(R(2, 1));
double theta = atan2f64(-R(2, 0), R(2, 2));
double psi = atan2f64(-R(0, 1), R(1, 1));
xyz_vector << phi, theta, psi;
// Eigen::Vector3d zxy_vector = R.eulerAngles(2, 0, 1);
// Eigen::Vector3d temp;
// temp << zxy_vector(1), zxy_vector(2), zxy_vector(0);
// cout << "check eigen euler" << endl;
// cout << xyz_vector << ";" << temp << endl;
// xyz_vector <<
return xyz_vector;
}
inline Eigen::Matrix3d delGinv_delroll(double roll, double pitch)
{
// \\frac{\\partial G}{\\partial \\phi}
Eigen::Matrix3d deltaG;
double theta = pitch;
double phi = roll;
double cos2_1 = 1.0 / (cos(phi) * cos(phi) + 1e-8);
deltaG << 0, 0, 0,
sin(theta) * cos2_1, 0, -cos(theta) * cos2_1,
-sin(phi) * sin(theta) * cos2_1, 0, cos(theta) * sin(phi) * cos(phi);
return deltaG;
}
inline Eigen::Matrix3d delGinv_delpitch(double roll, double pitch)
{
// \\frac{\\partial G}{\\partial \\theta}
Eigen::Matrix3d deltaG;
double theta = pitch;
double phi = roll;
double cos_1 = 1.0 / (cos(phi) + 1e-8);
deltaG << -sin(theta), 0, cos(theta),
cos(theta) * sin(phi) * cos_1, 0, sin(theta) * sin(phi) * cos_1,
-cos(theta)* cos_1, 0 , - sin(theta) * cos_1;
return deltaG;
}
inline Eigen::Matrix3d deltaR_deltaroll(double roll, double pitch, double yaw)
{
// \\frac{\\partial R}{\\partial \\phi}
Eigen::Matrix3d deltaR;
double theta = pitch;
double phi = roll;
double psi = yaw;
deltaR <<
-cos(phi)*sin(psi)*sin(theta), sin(phi)*sin(psi), cos(phi)*cos(theta)*sin(psi),
cos(phi)*cos(psi)*sin(theta), -cos(psi)*sin(phi), -cos(phi)*cos(psi)*cos(theta),
sin(phi)*sin(theta), cos(phi), -cos(theta)*sin(phi);
return deltaR;
}
inline Eigen::Matrix3d deltaR_deltapitch(double roll, double pitch, double yaw)
{
// \\frac{\\partial R}{\\partial \\phi}
Eigen::Matrix3d deltaR;
double theta = pitch;
double phi = roll;
double psi = yaw;
deltaR <<
- cos(psi)*sin(theta) - cos(theta)*sin(phi)*sin(psi), 0, cos(psi)*cos(theta) - sin(phi)*sin(psi)*sin(theta),
cos(psi)*cos(theta)*sin(phi) - sin(psi)*sin(theta), 0, cos(theta)*sin(psi) + cos(psi)*sin(theta)*sin(phi),
-cos(phi)*cos(theta) , 0, -cos(phi)*sin(theta);
return deltaR;
}
inline Eigen::Matrix3d deltaR_deltayaw(double roll, double pitch, double yaw)
{
// \\frac{\\partial R}{\\partial \\phi}
Eigen::Matrix3d deltaR;
double theta = pitch;
double phi = roll;
double psi = yaw;
deltaR << - cos(theta)*sin(psi) - cos(psi)*sin(phi)*sin(theta), -cos(phi)*cos(psi), cos(psi)*cos(theta)*sin(phi) - sin(psi)*sin(theta),
cos(psi)*cos(theta) - sin(phi)*sin(psi)*sin(theta), -cos(phi)*sin(psi), cos(psi)*sin(theta) + sin(phi)*sin(psi)*cos(theta),
0, 0, 0;
return deltaR;
}
//*********************************************************
void publish_ekf_msg(VectorXd X, std_msgs::Header header){
// Eigen::Vector3d T_c_i;//camera position in the IMU frame
// T_c_i<<0.05, 0.05, 0;
// Matrix3d R1;//camera R in the world frame
// R1=AngleAxisd(X(5),Vector3d::UnitZ())*
// AngleAxisd(X(3),Vector3d::UnitX())*
// AngleAxisd(X(4),Vector3d::UnitY());
// //将IMU的结果转到world frame
// // R1.transposeInPlace();//原地转置
// Eigen::Matrix3d R_i_w=Rcam*R1;
// Eigen::Vector3d T_i_w=T_c_i+Rcam*X.head(3);
// Eigen::Matrix3d R_w_i=R_i_w.transpose();
// X.segment<3>(3)=rotationMatrix2EulerVector_zxy(R_w_i);
// X.segment<3>(0)=-R_w_i*T_i_w;
Eigen::Vector3d T_i_c;
T_i_c << 0.05, 0.05, 0;
Matrix3d R_1;
R_1 = AngleAxisd(X(5), Vector3d::UnitZ()) *
AngleAxisd(X(3), Vector3d::UnitX()) *
AngleAxisd(X(4), Vector3d::UnitY());
R_1.transposeInPlace();
Matrix3d R_cw = Rcam.transpose() * R_1;
X.segment<3>(3) = rotationMatrix2EulerVector_zxy(R_cw);
X.segment<3>(0) = Rcam.transpose() * (-R_1 * X.segment<3>(0) - T_i_c);
nav_msgs::Odometry new_msg;
double roll=X(3);
double pitch=X(4);
double yaw=X(5);
Matrix3d R; //当前状态对应的旋转矩阵 旋转矩阵(3×3) Eigen::Matrix3d
R=AngleAxisd(yaw,Vector3d::UnitZ())*
AngleAxisd(roll,Vector3d::UnitX())*
AngleAxisd(pitch,Vector3d::UnitY());
Quaternion<double> q;
q=R;
new_msg.header=header;
new_msg.header.frame_id="world";
new_msg.pose.pose.position.x=X(0);
new_msg.pose.pose.position.y=X(1);
new_msg.pose.pose.position.z=X(2);
new_msg.pose.pose.orientation.w=q.w();
new_msg.pose.pose.orientation.x=q.x();
new_msg.pose.pose.orientation.y=q.y();
new_msg.pose.pose.orientation.z=q.z();
new_msg.twist.twist.linear.x=X(6);
new_msg.twist.twist.linear.y=X(7);
new_msg.twist.twist.linear.z=X(8);
new_msg.twist.twist.angular.x=X(9);
new_msg.twist.twist.angular.y=X(10);
new_msg.twist.twist.angular.z=X(11);
//x, y, z,
//roll, pitch, yaw,
//vx, vy, vz,
//vroll, vpitch, vyaw,
//ax, ay, az
odom_pub.publish(new_msg);
}
void imu_callback(const sensor_msgs::Imu::ConstPtr &msg)
{
//your code for propagation
//400HZ
//关于sensor message可以参考http://wiki.ros.org/sensor_msgs
//而其中的IMU在http://docs.ros.org/en/api/sensor_msgs/html/msg/Imu.html
//对于其中的stamp有注释如下:
// # Two-integer timestamp that is expressed as:
// # * stamp.sec: seconds (stamp_secs) since epoch (in Python the variable is called 'secs')
// # * stamp.nsec: nanoseconds since stamp_secs (in Python the variable is called 'nsecs')
// # time-handling sugar is provided by the client library
//那么定义的时间应该为:
double time=msg->header.stamp.sec+msg->header.stamp.nsec*1e-9; //单位为秒
double dt=0;
if (last_time>0){
dt=time-last_time;
}
last_time=time;
//IMU message:http://docs.ros.org/en/api/sensor_msgs/html/msg/Imu.html
//定义的消息如下:
// std_msgs/Header header
// geometry_msgs/Quaternion orientation
// float64[9] orientation_covariance
// geometry_msgs/Vector3 angular_velocity
// float64[9] angular_velocity_covariance
// geometry_msgs/Vector3 linear_acceleration
// float64[9] linear_acceleration_covariance
Vector3d omega_imu;//角速度
omega_imu<<msg->angular_velocity.x,msg->angular_velocity.y,msg->angular_velocity.z;
// omega_m=msg->angular_velocity; (没有这个运算符)
Vector3d a_imu;//线加速度
a_imu<<msg->linear_acceleration.x,msg->linear_acceleration.y,msg->linear_acceleration.z;
double roll=X_t(3);
double pitch=X_t(4);
double yaw=X_t(5);
//Rotation Matrix
Matrix3d R; //当前状态对应的旋转矩阵 旋转矩阵(3×3) Eigen::Matrix3d
//旋转向量(3×1)Eigen::AngleAxisd
//AngleAxisd(yaw,Vector3d::UnitZ())初始化旋转向量,角度为yaw,旋转轴为Z
//**********************
// 欧拉角转到旋转矩阵的做法:
// Eigen::AngleAxisd rollAngle(AngleAxisd(eulerAngle(2),Vector3d::UnitX()));
// Eigen::AngleAxisd pitchAngle(AngleAxisd(eulerAngle(1),Vector3d::UnitY()));
// Eigen::AngleAxisd yawAngle(AngleAxisd(eulerAngle(0),Vector3d::UnitZ()));
// Eigen::Matrix3d rotation_matrix;
// rotation_matrix=yawAngle*pitchAngle*rollAngle;
//**********************
R=AngleAxisd(yaw,Vector3d::UnitZ())*AngleAxisd(roll,Vector3d::UnitX())*AngleAxisd(pitch,Vector3d::UnitY());
//状态的变化
VectorXd dotX_t=VectorXd::Zero(15);
dotX_t.head(3)=X_t.segment<3>(6);//参考:https://blog.csdn.net/shuzfan/article/details/52367329
//x.head<n>()// x(1:n)
// x.segment<n>(i)// x(i+1 : i+n) X_t(6:9)为//vx, vy, vz,
//x, y, z,
//roll, pitch, yaw,
//vx, vy, vz,
//vroll, vpitch, vyaw,
//ax, ay, az
//angular velocity change (角速度的变化)
//angular velocity in the body frame (IMU) =matrix (G) * world angular velocity
// /matrix (G)为:
Matrix3d G, G_inverse;
G<<cos(pitch),0, -cos(roll)*sin(pitch),
0, 1, sin(roll),
sin(pitch),0, cos(roll)*cos(pitch);
G_inverse=G.inverse();
dotX_t.segment<3>(3)=G_inverse*(omega_imu-X_t.segment<3>(9));
dotX_t.segment<3>(6)=R*(a_imu-X_t.segment<3>(12));
dotX_t(8)=dotX_t(8)+g;
//计算状态转移矩阵的雅可比矩阵
MatrixXd F=MatrixXd::Identity (15,15);
// Derivatives for G, R
MatrixXd dGinv_droll = delGinv_delroll(roll, pitch);
MatrixXd dGinv_dpitch = delGinv_delpitch(roll, pitch);
MatrixXd dR_droll = deltaR_deltaroll(roll, pitch, yaw);
MatrixXd dR_dpitch = deltaR_deltapitch(roll, pitch, yaw);
MatrixXd dR_dyaw = deltaR_deltayaw(roll, pitch, yaw);
F.block<3, 3>(0, 6) = MatrixXd::Identity(3, 3) * dt; // position -> speed
F.block<3, 3>(3, 9) -= G_inverse * dt; // orientation -> bg
F.block<3, 1>(3, 3) += dGinv_droll * (omega_imu - X_t.segment<3>(9)) * dt; // orientation -> roll
F.block<3, 1>(3, 4) += dGinv_dpitch * (omega_imu - X_t.segment<3>(9)) * dt; // orientation -> pitch
F.block<3, 1>(6, 3) += dR_droll * (a_imu - X_t.segment<3>(12)) * dt; // velocity -> roll/pitch/yaw
F.block<3, 1>(6, 4) += dR_dpitch * (a_imu - X_t.segment<3>(12)) * dt;
F.block<3, 1>(6, 5) += dR_dyaw * (a_imu - X_t.segment<3>(12)) * dt;
F.block<3, 3>(6, 12) -= R * dt;
MatrixXd U=MatrixXd::Identity (15,12);
//P.block<rows, cols>(i, j) // P(i+1 : i+rows, j+1 : j+cols)
U.block<3,3>(3,0)=G_inverse; //U(3+1:3+3. 0+1:0+3)
U.block<3,3>(6,3)=R;
MatrixXd V=MatrixXd::Identity (15,12);
V=U*dt;
//EKF的状态预测
X_t=X_t+dt*dotX_t;
Var_t=F*Var_t*F.transpose()+V*Q*V.transpose();
//需要将当前的预测X_t发布嘛???
//在此处发布而不在measurement处发布的原因在于此次的频率更高,而measurement会自动更新状态
publish_ekf_msg(X_t,msg->header);
}
void odom_callback(const nav_msgs::Odometry::ConstPtr &msg) //marker
{
//your code for update
// camera position in the IMU frame = (0.05, 0.05, 0)
// camera orientaion in the IMU frame = Quaternion(0, 1, 0, 0); w x y z, respectively
// RotationMatrix << 1, 0, 0,
// 0, -1, 0,
// 0, 0, -1;
//20 HZ
//get measurements
Eigen::Matrix3d R_c_w;//camera在world frame下的旋转矩阵
Eigen::Vector3d T_c_w;
//赋值
T_c_w<<msg->pose.pose.position.x,msg->pose.pose.position.y,msg->pose.pose.position.z;
Eigen::Quaterniond q(
msg->pose.pose.orientation.w,
msg->pose.pose.orientation.x,
msg->pose.pose.orientation.y,
msg->pose.pose.orientation.z
);
R_c_w=q;
//Transform back
Eigen::Vector3d T_c_i;//camera position in the IMU frame
T_c_i<<0.05, 0.05, 0;
//IMU在world frame下的pose
Eigen::Matrix3d R_i_w=Rcam*R_c_w;
Eigen::Vector3d T_i_w=T_c_i+Rcam*T_c_w;
Eigen::Matrix3d R_w_i=R_i_w.transpose();
Eigen::Vector3d euler_meas=rotationMatrix2EulerVector_zxy(R_w_i);
Eigen::Vector3d T_w_i=-R_w_i*T_i_w;
VectorXd measurement_different(6);
measurement_different.head(3)=T_w_i-X_t.head(3);
measurement_different.segment<3>(3)=euler_meas-X_t.segment<3>(3);
//对角度进行归一化到-pi~pi区间
for (int i=3;i<6;i++){
if (measurement_different(i)>M_PI){
measurement_different(i)=measurement_different(i)-2*M_PI;
}
else if(measurement_different(i)<-M_PI){
measurement_different(i)=measurement_different(i)+2*M_PI;
}
}
Eigen::MatrixXd C=Eigen::MatrixXd::Zero(6,15);
C.block<6,6>(0,0)=Eigen::MatrixXd::Identity(6,6);
Eigen::MatrixXd W=Eigen::MatrixXd::Identity(6,6);
Eigen::MatrixXd K=Var_t*C.transpose()*(C*Var_t*C.transpose()+W*Rt*W.transpose()).inverse();
//measuremnet update
X_t=X_t+K*measurement_different;
Var_t=Var_t-K*C*Var_t;
for (int i=3;i<6;i++){
if (X_t(i)>M_PI){
X_t(i)=X_t(i)-2*M_PI;
}
else if(X_t(i)<-M_PI){
X_t(i)=X_t(i)+2*M_PI;
}
}
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "ekf");
ros::NodeHandle n("~");
ros::Subscriber s1 = n.subscribe("imu", 1000, imu_callback);//做预测
ros::Subscriber s2 = n.subscribe("tag_odom", 1000, odom_callback);//做测量更新,虽然称呼为odom,但实际上是基于PNP的3D-2D pose estimation
odom_pub = n.advertise<nav_msgs::Odometry>("ekf_odom", 100);
Rcam = Quaterniond(0, 1, 0, 0).toRotationMatrix();//camera orientaion in the IMU frame
cout << "R_cam" << endl << Rcam << endl;
// Q imu covariance matrix; Rt visual odomtry covariance matrix
// You should also tune these parameters
// Q.topLeftCorner(6, 6) = 0.01 * Q.topLeftCorner(6, 6);
// Q.bottomRightCorner(6, 6) = 0.01 * Q.bottomRightCorner(6, 6);
// Rt.topLeftCorner(3, 3) = 0.1 * Rt.topLeftCorner(3, 3);
// Rt.bottomRightCorner(3, 3) = 0.1 * Rt.bottomRightCorner(3, 3);
// Rt.bottomRightCorner(1, 1) = 0.1 * Rt.bottomRightCorner(1, 1);
Var_t.block<6, 6>(9, 9) = MatrixXd::Identity(6, 6) * 0.01;
Q.topLeftCorner(6, 6) = 0.1 * Q.topLeftCorner(6, 6);
Q.bottomRightCorner(6, 6) = 0.005 * Q.bottomRightCorner(6, 6);
Rt.topLeftCorner(3, 3) = 0.1 * Rt.topLeftCorner(3, 3);
Rt.bottomRightCorner(3, 3) = 0.1 * Rt.bottomRightCorner(3, 3);
Rt.bottomRightCorner(1, 1) = 0.1 * Rt.bottomRightCorner(1, 1);
ros::spin();
}
对应的launch文件
<launch>
<!-- <node name="rosbag" pkg="rosbag" type="play" args=" $(find ekf)/bag/ekf_A3.bag -r 1" /> -->
<node name="rosbag" pkg="rosbag" type="play" args=" $(find ekf)/bag/ekf_A3.bag -r 0.5" />
<!-- 更改了视频播放的速率 -->
<node pkg="ekf" type="ekf" name="ekf" output="screen">
<remap from="~imu" to="/djiros/imu"/>
<!-- <remap from="~tag_odom" to="/tag_detector/odom_yourwork"/> -->
<remap from="~tag_odom" to="/tag_detector/odom_ref"/>
</node>
<node pkg="tag_detector" type="tag_detector" name="tag_detector" output="log">
<remap from="~image_raw" to="/djiros/image"/>
<param name="cam_cal_file" type="string" value="$(find ekf)/config/TA-camera.yml"/>
<param name="board_config_file" type="string" value="$(find ekf)/config/tag_1.yml"/>
</node>
</launch>
测试
运行代码是
roslaunch ekf A3.launch 注意,对于launch如果不小心用了rosrun运行,会出现下面的错误:
通过rviz与rqt_plot来可视化结果~
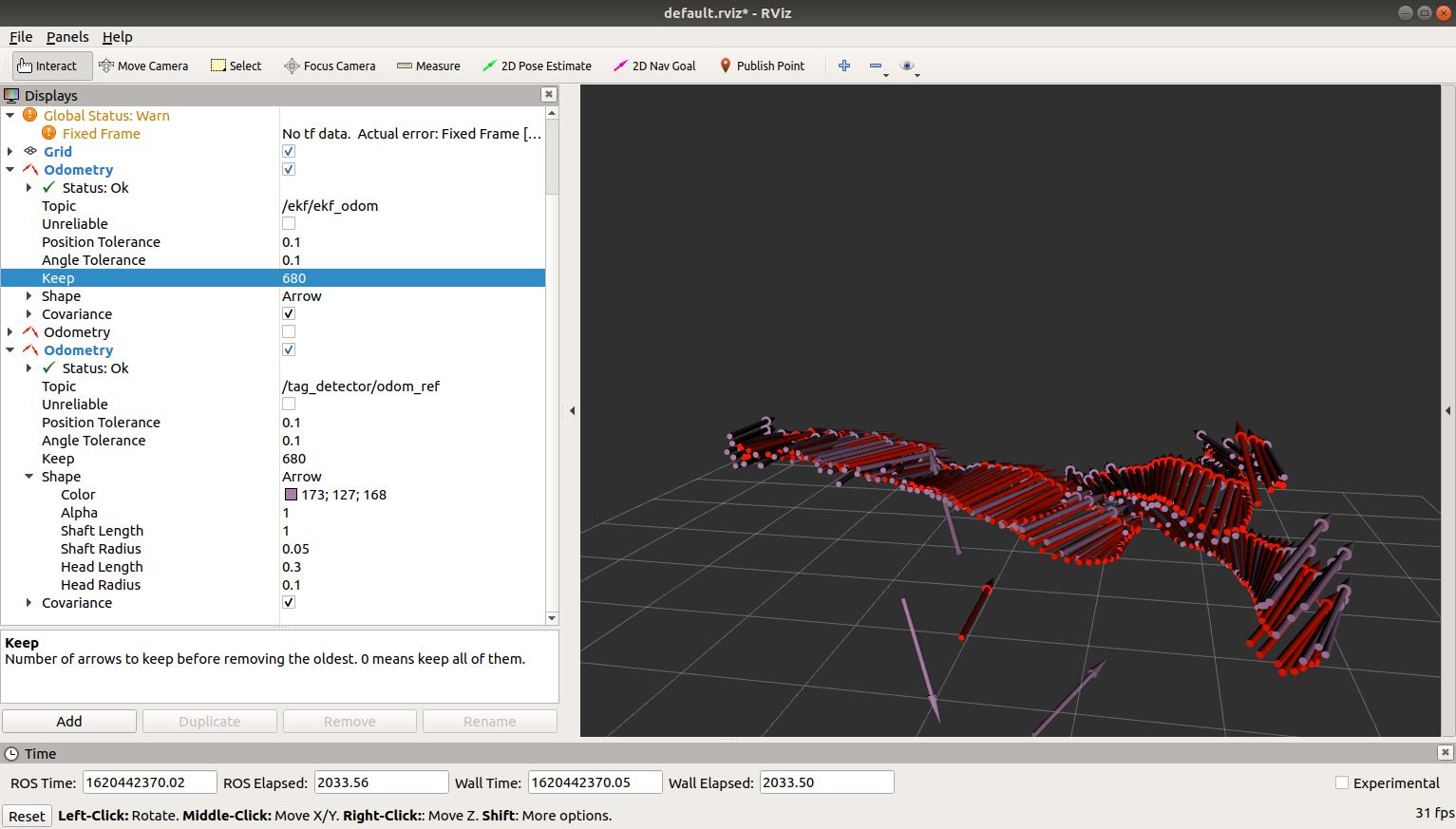
更多实验的效果可见视频~
以上是关于ROS实验笔记之——基于EKF融合Visual-marker localization与IMU的主要内容,如果未能解决你的问题,请参考以下文章