kitti之ros可视化_学习笔记--第1课:资料准备及环境介绍
Posted 鸿_H
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了kitti之ros可视化_学习笔记--第1课:资料准备及环境介绍相关的知识,希望对你有一定的参考价值。
概要:本系列笔记,记录的是使用kitti数据集在ros可视化操作,并案例方式进行介绍。在开始本系列课程学习之前,交代清楚一些所需要的材料。
0、环境及工具
ubuntu16.04,ros-kinetic,python2,vscode,opencv
这里要特别注意ros-kintic,一定要注意这些环境和工具都是没有问题的,相关依赖都是ok的。第一次安装ros-kinetic的话,依赖这些,可参考链接
https://blog.csdn.net/qq_45701501/article/details/109266080
1、使用的kitti数据集及下载
下载链接:http://www.cvlibs.net/datasets/kitti/raw_data.php
本系列教程,下载的是2011_09_26_drive_0005 (0.6 GB)包

注意点:
1)数据集下载:点击 synced+rectified data :下载整个原生资料集
2)坐标系变换资料下载:点击 calibration :记录的是各个坐标系之间转换,如相机坐标系之间的转换,激光坐标系与相机坐标系的转换等等。
3)解压文件保存,内容打开路径参考:

简单理解,把1)下载的压缩包解压,放到home目录下的文件夹data里面;然后,把2)下载的压缩包解压得到的三个.txt文件,放到截图目录下的2011_09_26文件夹中,效果如图

4)小建议,无法科学上网的小伙伴,这两个压缩包有需要的可私信。
2、一些基本的传感器安装展示
来源:http://www.cvlibs.net/datasets/kitti/setup.php
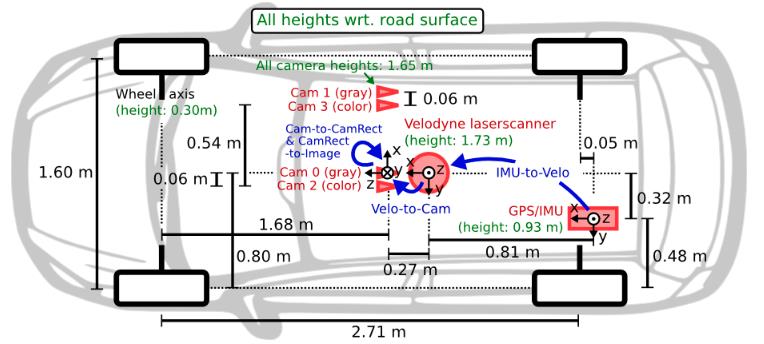
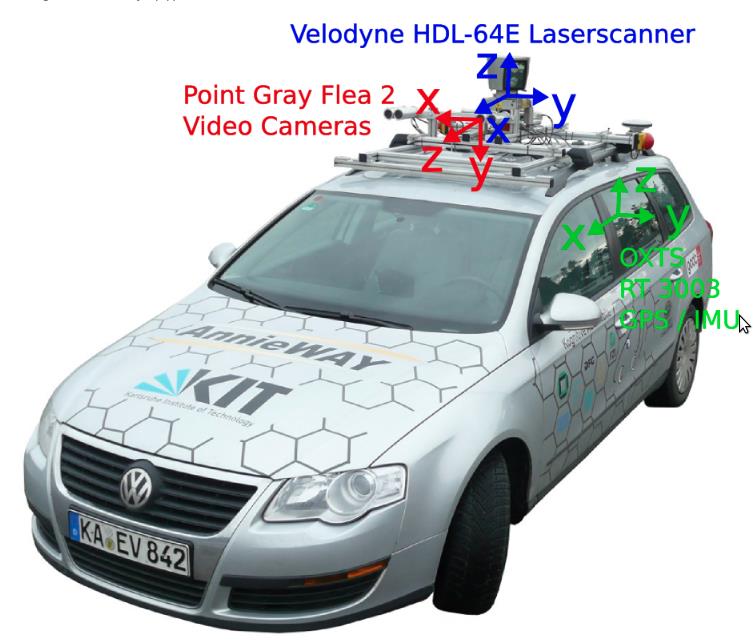
这两图,主要关注点在于里面传感器的坐标系,以及安装位置,特别是激光雷达和相机。
3、kitti数据集ros可视化方法一般介绍
1)使用ros2bag,具体操作可参考这篇博客
https://blog.csdn.net/qq_45701501/article/details/116191196
这种方式虽然简单,但样式固定,没有多少灵活性可言。
2)自定义方式,也就是本系列课程学习笔记内容,后续博客详细介绍。最后效果如图所示
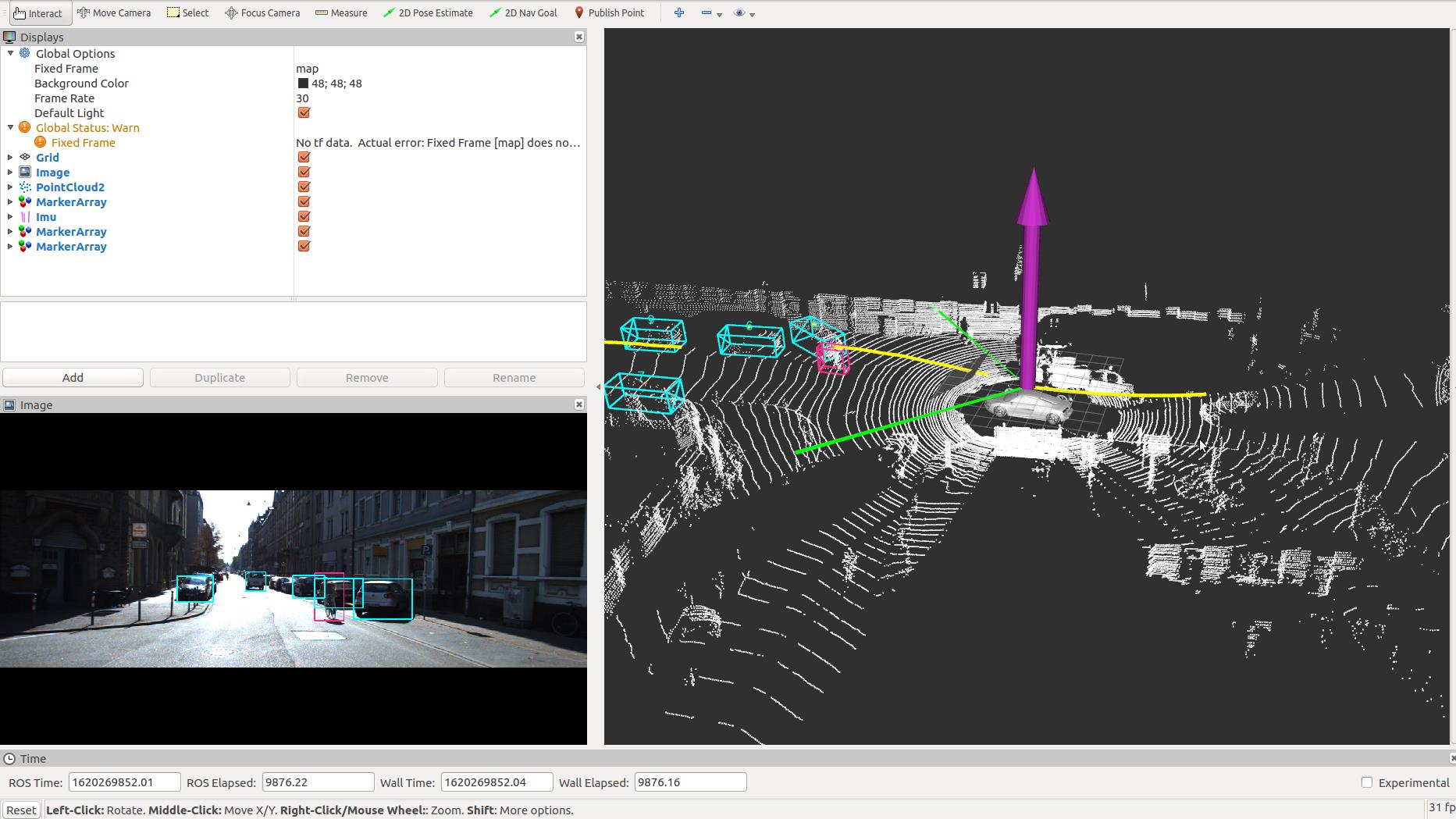
#####################
学习课程来源up主,AI葵:
https://www.youtube.com/watch?v=TBdcwwr5Wyk
致谢AI葵老师
不积硅步,无以至千里
好记性不如烂笔头
感觉有点收获的话,麻烦大大们点赞收藏哈
以上是关于kitti之ros可视化_学习笔记--第1课:资料准备及环境介绍的主要内容,如果未能解决你的问题,请参考以下文章
kitti之ros可视化_学习笔记--第7课:发布gps资料
kitti之ros可视化_学习笔记--第8课:tracking资料下载及2d侦测框绘制
kitti之ros可视化_学习笔记--第4课:车子模型的添加