计算机视觉算法——图像分类网络总结
Posted Jichao_Peng
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了计算机视觉算法——图像分类网络总结相关的知识,希望对你有一定的参考价值。
计算机视觉算法——图像分类网络总结
计算机视觉算法——图像分类网络总结
由于后面工作方向的需要,也是自己的兴趣,我决定补习下计算机视觉算法相关的知识点,参考的学习资料主要是B站Up主霹雳吧啦Wz,强推一下,Up主的分享非常的细致认真,从他这里入门是个不错的选择,Up主也有自己的CSDN博客,我这里主要是作为课程的笔记,也会加入一些自己的理解,我也只是个入门的小白,如果有错误还请读者指正。
要入门基于DNN的计算机视觉,分类网络构架是基础,分类网络会作为各种衍生网络的backbone,也就是重要组成部分,起到了提取特征等作用,下面开始逐个总结各个图像分类网络的特点。
1. AlexNet
AlexNet是2012年CVPR发表的一篇革命性的论文,现在的引用量都快接近8w了,它的主要创新点是:
- 首次利用GPU进行网络加速训练;
- 使用了RxeLU激活函数,而不是传统的SIgmoid激活函数以及Tanh激活函数;
- 使用了LRN局部响应归一化;
- 在全连接层的前两层使用了Dropout随机失活神经元操作,以减少过拟合;
1.1 网络结构
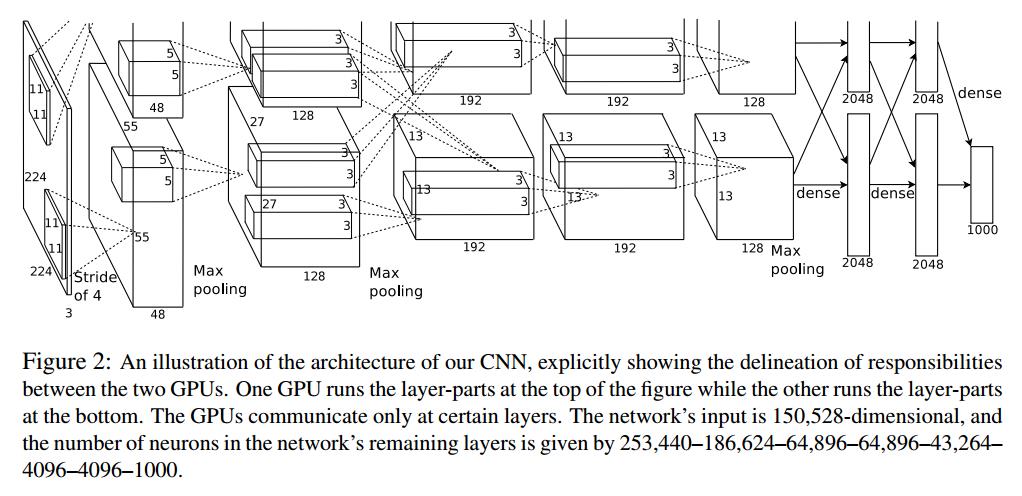
AlexNet网络由五层卷积加三层最大池化层,以及最后三层的全连接层构成,那会儿由于GPU显存不够大,因此作者采用的方式是将一张图一份为二,分别使用两张GPU训练,在进行第三层卷积时会将两张GPU的输出进行联合输入,在其他层数据都是独立的。
1.2 关键知识点
1.2.1 卷积和池化特征尺寸计算公式
AlexNet中主要是使用了卷积和最大池化层,卷积后特征尺寸计算公式为: N = ( W − F + 2 P ) / S + 1 N=(W-F+2 P) / S+1 N=(W−F+2P)/S+1其中,输入特征尺寸为 W W W,卷积核的大小为 F × F F \\times F F×F,卷积步daxiao长为 S S S,padding的像素数为 P P P,那么输出特征尺寸即为 N N N。池化可以看作一种特殊的卷积核,因此池化后特征尺寸计算同样满足上述规律。
1.2.2 ReLU非线性激活函数
ReLU非线性激活函数有如下优势:
- 可以使网络训练更快。 相比于sigmoid、tanh,导数更加好求,反向传播就是不断的更新参数的过程,因为其导数不复杂形式简单;
- 增加网络的非线性。 本身为非线性函数,加入到神经网络中可以是网格拟合非线性映射;
- 防止梯度消;
- 使网格具有稀疏性;
1.2.3 防止过拟合
AlexNet中使用两种方法减少过拟合,分别是:
- 数据扩增:对图片进行随机crop以及对RGB颜色空间进行调整
- Dropout:在训练阶段的每次前向传播中,都会重新进行 dropout。因此,每次有新的输入时,模型会被随机采样成不同的架构,但是所有的架构共享权值。该技术可以减少神经元之间的相互依赖性。因此,模型被强制学习更加稳健的特征。
2. VGG
VGG是2014年由牛津大学提出的,是应用非常广泛的一种backbone,此方法在提出时主要的贡献是:
- 文章提出通过堆叠多个 3 × 3 3 \\times 3 3×3的卷积核可以代替大尺度卷积核,在保证相同感受野的前提下,增加了网络深度,并且 3 × 3 3\\times3 3×3的卷积核更有利于保留图像性质,改善了网络效果。
2.1 网络结果
VGG网络的具体参数如下:
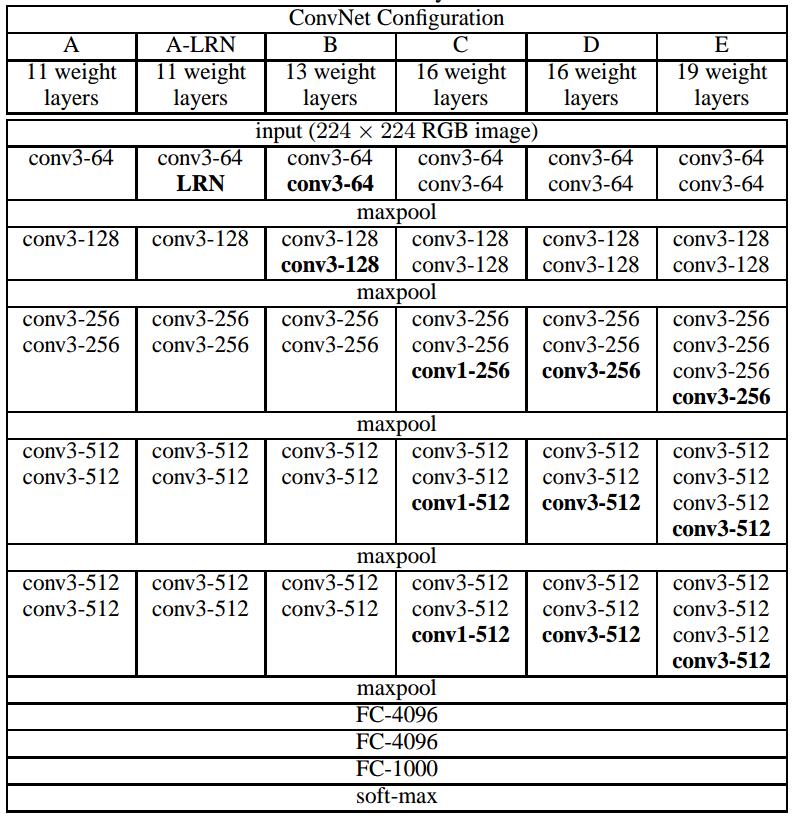
其中网络D包含16个隐藏层,称为VGG16,网络D包含19个隐藏层,称为VGG19,VGG16的结构如下图所示:
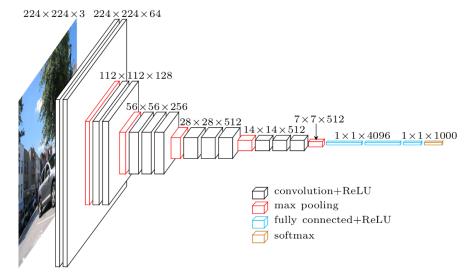
这里值得注意的一点是,在网络D中,卷积层中卷核大小为
3
×
3
3 \\times 3
3×3,步距为1,padding为1,最大池化层的尺寸为2, 步距为2,因此我们可以计算经过卷积层后的特征尺寸不变,经过最大池化层后特征尺寸减半。此外最后三层为全连接层,占据了网络的绝大多数参数数量。
2.2 关键知识点
2.2.1 感受野的计算以及大小卷积核
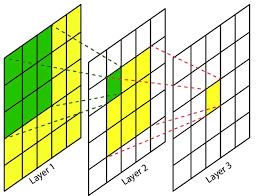
这是VGG网路中最大的亮点,首先我们来了解下什么是感受野:在卷积神经网络中,决定某一层输出结果中一个元素对应的输入层的区域大小,称作感受野,也可以说是feature map上的一个单元对应输入层的区域的大小,如下图的例子:
在上图中我们设置卷积核大小为
3
×
3
3\\times3
3×3,步距为1,padding为0,按照前文的特征尺寸计算公式,
5
×
5
5\\times5
5×5的特征,经过一层卷积后大小为
3
×
3
3\\times3
3×3,再经过一层卷积后大小为
1
×
1
1\\times1
1×1,感受野就是反过来推导,
1
×
1
1\\times1
1×1的特征单元在两层卷积前对应的区域的大小即
5
×
5
5\\times5
5×5,因此两层
3
×
3
3\\times3
3×3的卷积核的感受野的大小即
5
×
5
5\\times5
5×5,即可以代替一个
5
×
5
5\\times5
5×5的卷积核。我们来计算下两种方法需要的参数数量,对于
5
×
5
5\\times5
5×5的卷积核,参数数量为:
5
×
5
×
C
×
C
=
25
C
2
5 \\times 5 \\times C \\times C = 25C^2
5×5×C×C=25C2对于两层
3
×
3
3\\times3
3×3的卷积核,参数数量为:
3
×
3
×
C
×
C
+
3
×
3
×
C
×
C
=
18
C
2
3 \\times 3 \\times C \\times C + 3 \\times 3 \\times C \\times C = 18C^2
3×3×C×C+3×3×C×C=18C2由此可见,在感受野相同的情况下,叠加小卷积核的数量更小,并且网络更深,效果更有,并且有文章称
3
×
3
3\\times3
3×3更有利于保持图像性质。
3. GoogLeNet
GoogLeNet的网络的亮点主要有:
- 引入Inception结构,用于融合不同尺寸的特征信息;
- 使用 1 × 1 1 \\times 1 1×1的卷积核进行降维以及映射处理;
- 添加两个辅助分类器帮助训练
- 丢弃全连接层,使用平均池化层,大大减少模型参数;
3.1 网络结构
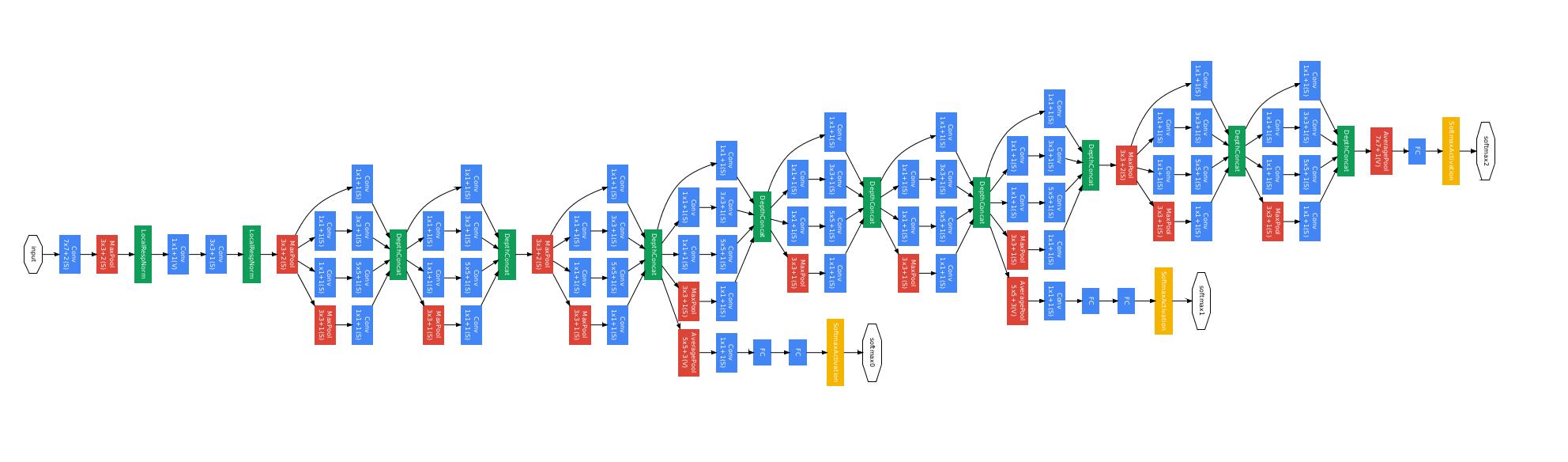
我们可以注意到,在AlexNet和VGG中都是串行处理,而在GoogLeNet通过Inception结构实现了并行处理,下面我们对Inception结构的细节进行讨论,
3.2 关键知识点
3.2.1 Inception结构
Inception结构设计的核心思想是,通过多个卷积核提取图像不同尺度的信息,最后进行融合,以得到图像更好的表征,我们以第三层的Inception结构为例,结构图如下: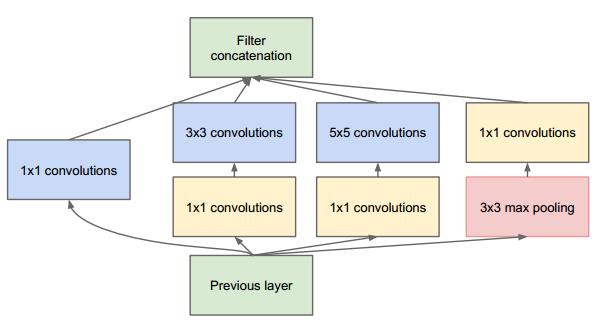
具体来说,分别是:
- 64个1x1的卷积核,然后RuLU,输出28x28x64;
- 96个1x1的卷积核,作为3x3卷积核之前的降维,变成28x28x96,然后进行ReLU计算,再进行128个3x3的卷积(padding为1),输出28x28x128;
- 16个1x1的卷积核,作为5x5卷积核之前的降维,变成28x28x16,进行ReLU计算后,再进行32个5x5的卷积(padding为2),输出28x28x32;
- pool层,使用3x3的核(padding为1),输出28x28x192,然后进行32个1x1的卷积,输出28x28x32。
最后将四个结果进行连接,对这四部分输出结果的第三维并联,即64+128+32+32=256,最终输出28x28x256,这一步操作称为concate。
3.2.2 1 × 1 1 \\times 1 1×1卷积作用
1
×
1
1 \\times 1
1×1卷积层引起人们重视是在NIN的网络结构中,在GoogLeNet网络中,
1
×
1
1 \\times 1
1×1卷积层主要是用于降维和升维,目的在与减少网络计算量,同样以上述第三层的Inception结构为例,我们计算参数量:
1
×
1
×
192
×
64
+
(
1
×
1
×
192
×
96
+
3
×
3
×
96
×
128
)
+
(
1
×
1
×
192
×
16
+
5
×
5
×
16
×
32
)
1 \\times 1 \\times 192 \\times 64+(1 \\times 1 \\times 192 \\times 96+3 \\times 3 \\times 96 \\times 128)+(1 \\times 1 \\times 192 \\times 16+5 \\times 5 \\times 16 \\times 32)
1×1×192×64+(1×1×192×96+3×3×96×128)+(1×1×192×16+5×5×16×32)
如果去掉网络中的
1
×
1
1 \\times 1
1×1的模块,参数量如下:
1
×
1
×
192
×
64
+
3
×
3
×
192
×
128
+
5
×
5
×
192
×
32
1 \\times 1 \\times 192 \\times 64+3 \\times 3 \\times 192 \\times 128+5 \\times 5 \\times 192 \\times 32
1×1×192×64+3×3×192×128+5×5×192×32由此可见,如果去掉网络中的
1
×
1
1 \\times 1
1×1模块,参数量将增加到原来网络的三倍
3.2.3 辅助分类器
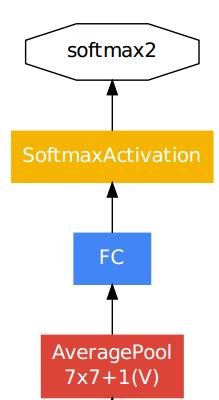
辅助分类器在训练的过程中同样会计算损失,在GoogLeNet论文中,辅助分类器的损失被乘以0.3后加到主分类器的损失中作为最终的损失来训练网络,主分类器的结果如下:
辅助分类器的结构如下:
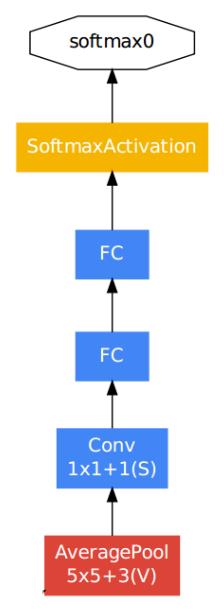
结构的细节具体说来:
- 均值池化层核尺寸为5x5,步长为3;
- 1x1的卷积用于降维,拥有128个滤波器,采用ReLU激活函数;
- 全连接层有1024个神经元,采用ReLU激活函数;
- dropout层的dropped的输出比率为70%;
- softmax激活函数用来分类,和主分类器一样预测1000个类,但在推理时移除。
辅助分类器的作用的是一方面增加了反向传播的梯度信号,帮助低层特征训练,从而低层特征也有很好的区分能力,另一方面辅助分类器提供了额外的正则化效果,对于整个网络的训练很有裨益。
4. ResNet
ResNet是2015年由微软实验室提出的,网络的亮点主要有:
- 超深的网络结构(可以突破1000层);
- 提出risidual模块:
- 使用batch normalization加速训练(丢弃dropout);
4.1 网络结构
网络结构如下图所示,其中ResNet为下图中最上层的网络
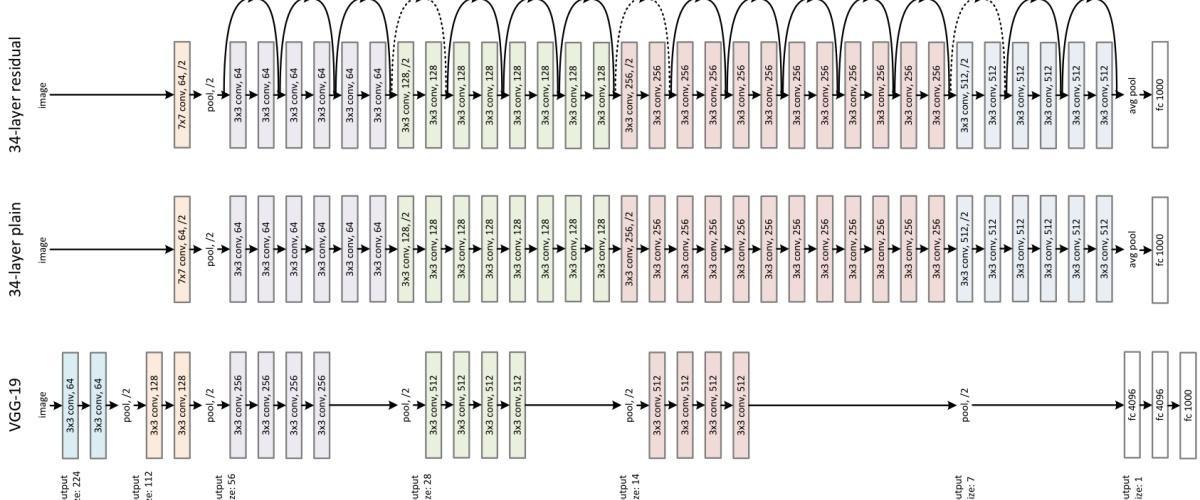
可以看到ResNet其实就是对residual模块的反复堆叠,随着网络层数的增加,深层网络中主要会出现如下两个问题而导致网络效果变差:
- 梯度消失或者梯度爆炸;
- 退化问题;
其中梯度消失或者梯度爆炸主要通过数据预处理、权重初始化以及batch normalization方法解决,而退化问题主要是通过本文提出的residual模块解决,下面分别对这两个关键知识点进行总结。
4.2 关键知识点
4.2.1 residual模块
residual模块主要解决了深层网络出现的退化问题,退化问题具体表现就是层数深的网络反而没有层数浅的好,residual模块结构如下图所示:
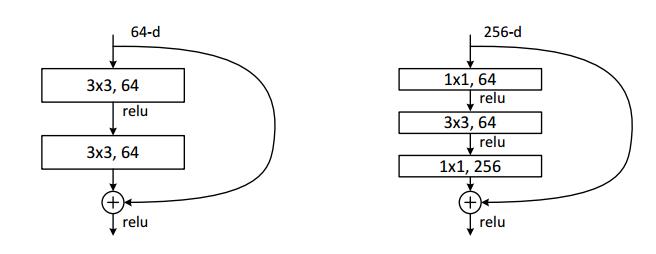
其中,左侧为34层网络的residual模块,右侧为50、101、152层网络的residual模块,右侧residual模块的主要特点是增加
1
×
1
1\\times1
1×1卷积核来进行升维和降维,减少网络参数量,以不至于过深的网络带来巨大的参数量导致难以学习。另一个值得注意的点是这里的residual是通过add操作将特征合并,而不是通过concate操作,这里我们来说明下concate操作和add操作的区别:
- add要求整个特征矩阵的长宽和深度都相同,而concate仅仅要求长宽相同,而深度可以不同,因此concate就是按照深度方向进行拼接的
- add和concate操作是可以相互转换的,如下图所示:
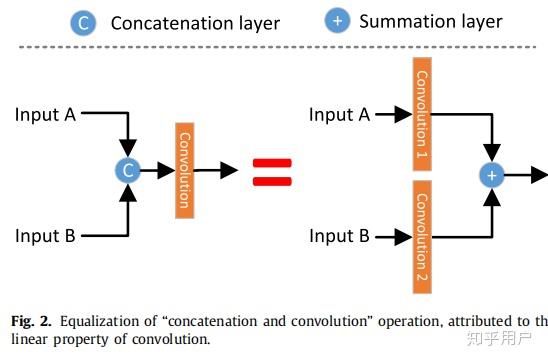
由此可见,add其实可以相当于concate之后对应通道共享同一个卷积核,add相当于加了一种先验,当两路输入可以具有“对应通道的特征图语义类似”(可能不太严谨)的性质的时候,可以用add来替代concate,这样更节省参数和计算量(concate是add的2倍)。
4.2.2 batch normalization
batch normalization是2015年的论文《Batch Normalization: Accelerating Deep Network Training by Reducing Internal Covariate Shift》提出的,其目的是使得我们同一通道的feature map满足均值为0,方差为1的分布规律,batch normalization的具体操作如下:假设小批量输入为 B = { x 1 … m } \\mathcal{B}=\\left\\{x_{1 \\ldots m}\\right\\} B={x1…m},学习的参数为 γ , β \\gamma, \\beta γ,β,那么操作主要有如下四个步骤:
- 求得小批量数据的均值: μ B ← 1 m ∑ i = 1 m x i \\mu_{\\mathcal{B}} \\leftarrow \\frac{1}{m} \\sum_{i=1}^{m} x_{i} μB←m1i=1∑mxi
- 求得小批量数据的方差:
σ
B
2
←
1
m
∑
i
=
1
m
(
x
i
−
μ
B
)
2
\\sigma_{\\mathcal{B}}^{2} \\leftarrow \\frac{1}{m} \\sum_{i=1}^{m}\\left(x_{i}-\\mu_{\\mathcal{B}}\\right)^{2}
以上是关于计算机视觉算法——图像分类网络总结的主要内容,如果未能解决你的问题,请参考以下文章