基于SVM,KNN,CNN的数字图像识别
Posted 宫水二叶
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了基于SVM,KNN,CNN的数字图像识别相关的知识,希望对你有一定的参考价值。
文章目录
一些瞎扯的话
跟朋友们随便瞎扯几句
在学校过了个五一,也没回家也没出去玩,倍感无聊和寂寞。看着空间里大家晒出游,晒朋友,更加难受,我想,不能这样了。于是我打开老师布置的作业开始研究,实验搞了一天,写文档又写了一天,写完后感觉十分充实,快乐了许多。果然“学习使人快乐”所言非虚哈哈哈。
以上内容纯属瞎扯,写着作业还是寂寞呜呜呜。
这里推荐Todd Li翻唱的一首歌《最寂寞的时候》
离谱的是布置完实验的第二天就有粉丝催更,我看明白了,你们根本不馋我身子,只馋我代码。

一、必备的有关 OpenCV 和 HOG 的前置知识
想要看懂下面的实验,这些知识必不可少。
1.关于OpenCV模块:图片读、写和显示操作,以及图片属性
(1)读入图片:
读入图片时使用’cv.imread’函数,第一个参数是图片位置,第二个参数是读图片的模式,‘1’为读入为彩色图像,‘0’为读入为灰度图像,’-1’为原始图像读入。因此将彩色图像转为灰度图时,只需选择参数为‘0’即可。
代码如下(示例):
import cv2 as cv
if __name__ == '__main__':
# 读图片(有多种模式)
# Load an color image in grayscale
img = cv.imread('1.jpg', 0)
# 1 彩色 0 灰度图像 -1 原始图像
(2)写图片:
写图片时直接使用‘cv.imwrite’函数即可,第一个参数为写入的位置,第二个参数即图像本身。如(1),笔者读入’1.jpg’,读入时转为灰度图像,在写入同一文件夹下的’1_grey.jpg’文件中。两张图片如下如所示:
代码如下(示例):
cv.imwrite('1_grey.jpg', img)
两张图片如下:


↑我女朋友
没错我在想peach,图源网络,侵删
(3)显示图片:
显示图片是使用‘cv.imshow’函数,第二个参数是要显示的图像,第一个参数是显示时图片窗口的名字。注意显示图片时要加上一行’cv.waitKey(0)’来让窗口等待用户按键,不然显示的图片会一闪而过。
代码如下(示例):
# 显示图片
cv.imshow('picture1', img) # 第一个参数定义窗口名
cv.waitKey(0) #无限制的等待用户的按键
cv.destroyAllWindows()
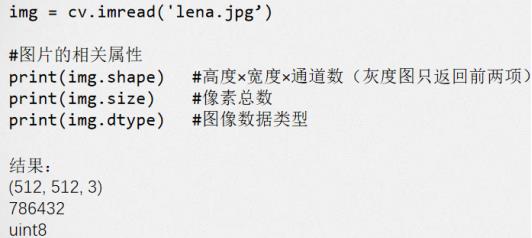
(4)图片属性:
图片属性包括高度、宽度、通道数、像素总数等信息,示例如下图:
2.关于OpenCV模块:图片缩放和仿射变换
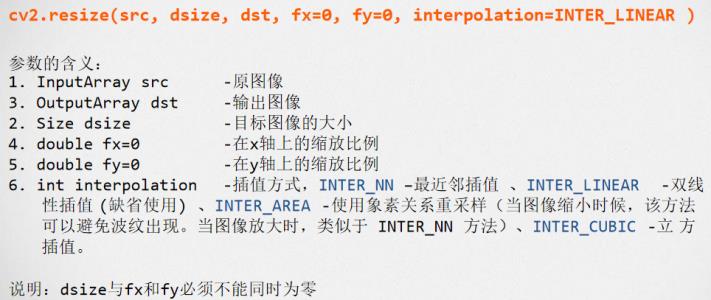
(1)图片缩放:
使用 OpenCV 模块实现图片缩放时主要使用 ‘cv2.resize’函数,注意是‘主要’,因为仿射变换也能实现图片缩放,下面一个实验即是。
函数可以使用参数 ‘fx’和‘fy’或者直接使用‘dsize’参数来控制缩放比例,十分方便。
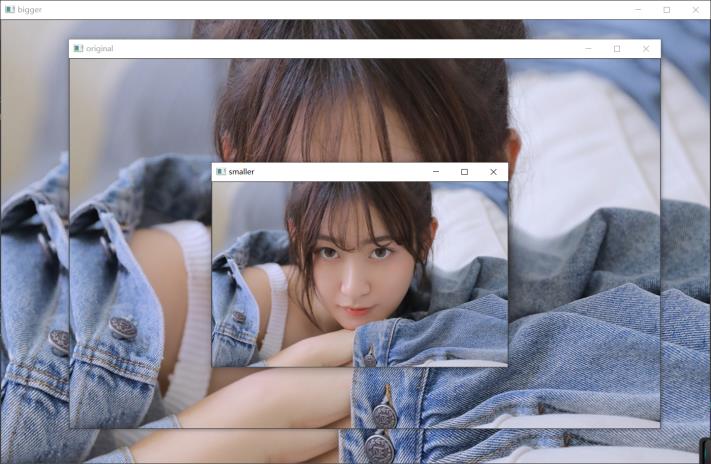
代码如下(示例):
smaller = cv.resize(img, None, fx=0.5, fy=0.5, interpolation=cv.INTER_CUBIC) # OR
height, width = img.shape[:2]
bigger = cv.resize(img, (int(1.2 * width), int(1.2 * height)), interpolation=cv.INTER_CUBIC)
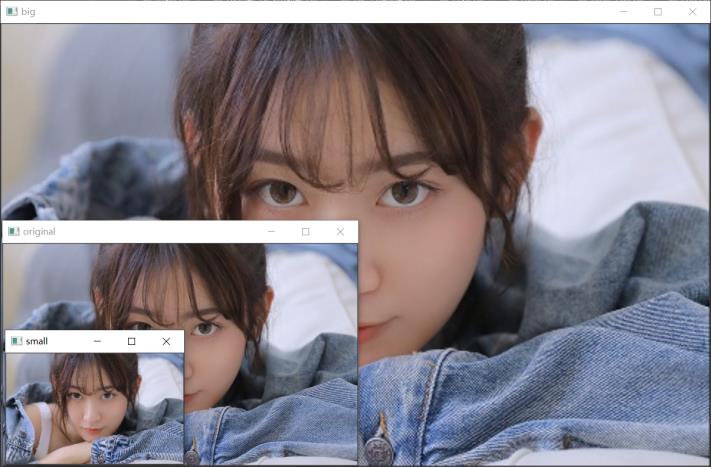
结果示例如下,注意看窗口名字来辨别图片:
(2)仿射变换:
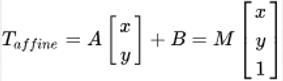
一个任意的仿射变换都能表示为乘以一个矩阵(线性变换)接着再加上一个向量(平移)。
旋转(线性变换)
平移 (向量加)
缩放操作 (线性变换)
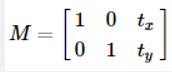
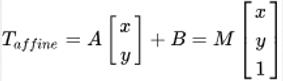
我们通常使用 2 x 3 矩阵来表示仿射变换.其中左边的2×2子矩阵是线性变换矩阵,右边的2×1的两项是平移项:

对于图像上的任一位置(x,y),仿射变换执行的是如下的操作:
平移:将每一点移到到(x+t , y+t),变换矩阵为:
旋转变换:目标图形围绕原点顺时针旋转Θ弧度,线性变换矩阵为:
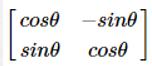
目标图形以(x,y)为轴心顺时针旋转θ弧度,相当于两次平移与一次原点旋转变换的复合,即先将轴心(x,y) 移到到原点,然后做旋转变换,最后将图片的左上角置为图片的原点。变换矩阵为:

仿射函数‘cv2.warpAffine’:
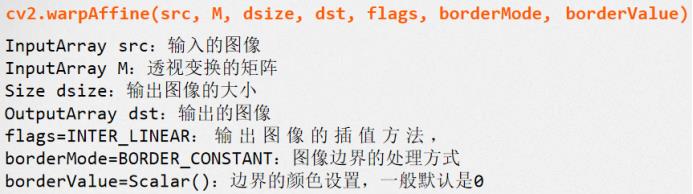
用来获得变换矩阵M的函数‘cv2.warpAffine’,方便我们在进行图片旋转时计算弧度:
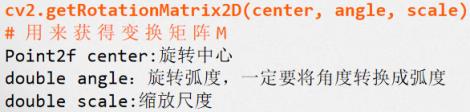
仿射函数‘cv.getAffineTransform’:
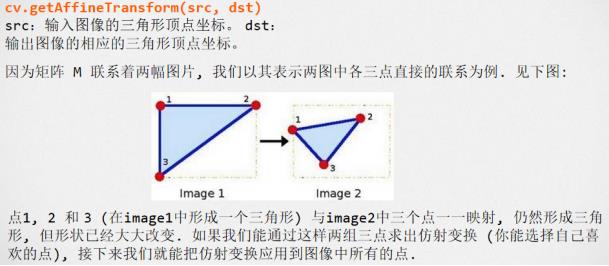
看懂了吗,建议看不懂的童鞋重新研读线性代数课本

3.有关 HSV 空间, Gramma变换, HOG 特征的知识。
(1)HSV 空间:
HSV空间是由美国的图形学专家A. R. Smith提出的一种颜色空间,HSV分别是色调(Hue),饱和度(Saturation)和明度(Value)。
在HSV空间中进行调节就避免了直接在RGB空间中调节是还需要考虑三个通道的相关性。OpenCV中H的取值是[0, 180),其他两个通道的取值都是[0, 256),通过HSV空间对 图像进行调色更加方便:
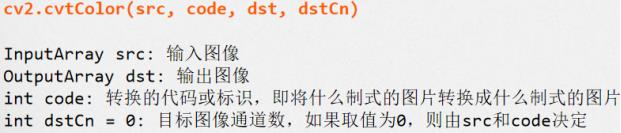
转换图片制式的函数‘cv2.cvtColor’:
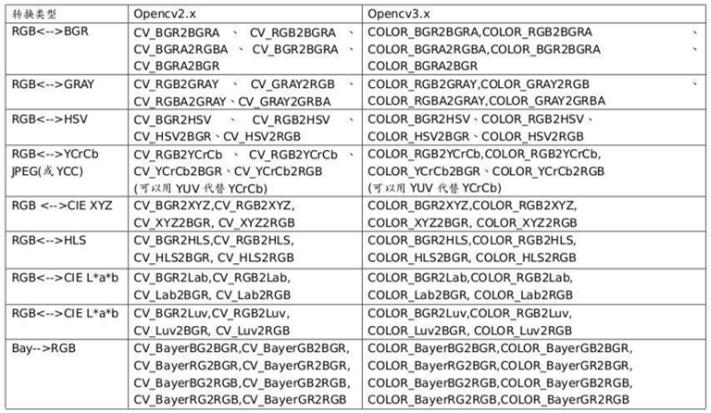
转换类型表:
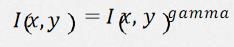
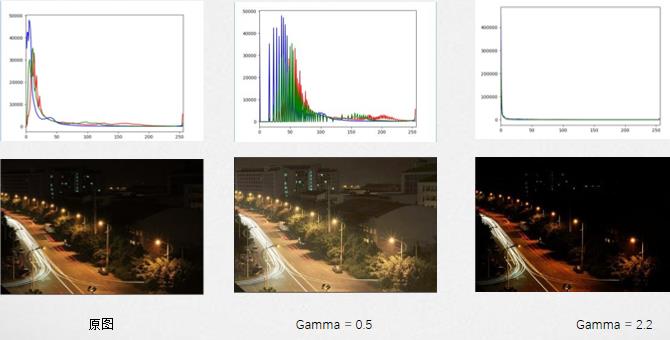
(2)Gramma变换:
Gamma变换是矫正相机直接成像和人眼感受图像差别的一种常用手段,简单来说就是通过非线性 变换(因为人眼对自然的感知是非线性的)让图像从对曝光强度的线性响应变得更接近人眼感受到 的响应。Gamma压缩公式:
如果直方图中的成分过于靠近0或者255,可能就出现了暗部细节不足或者亮部细节丢失的情况。一个常用方法是考虑用Gamma变换来提升/降低暗部细节。
示例图如下:
(3)HOG 特征:
方向梯度直方图(Histogram of Oriented Gradient, HOG)特征是一种在计算机视觉和 图像处理中用来进行物体检测的特征描述子。它通过计算和统计图像局部区域的梯度方向直方 图来构成特征。HOG特征结合SVM分类器已经被广泛应用于图像识别中,尤其在行人检测中获 得了极大的成功。
HOG特征提取方法就是将一个image(你要检测的目标或者扫描窗口):
1)灰度化(将图像看做一个x,y,z(灰度)的三维图像);
2)采用Gamma校正法对输入图像进行颜色空间的标准化(归一化);目的是调节图 像的对比度,降低图像局部的阴影和光照变化所造成的影响,同时可以抑制噪音的干扰;
3)计算图像每个像素的梯度(包括大小和方向);主要是为了捕获轮廓信息,同时进一步弱化光照的干扰。
4)将图像划分成小cells(例如10X10像素/cell);
5)统计每个cell的梯度直方图(不同梯度的个数),即可形成每个cell的descriptor;
6)将每几个cell组成一个block(例如2*2个cell/block),一个block内所有cell的特征descriptor串联起来便得到该block的HOG特征descriptor。
7)将图像image内的所有block的HOG特征descriptor串联起来就可以得到该image(你要检测的目标)的HOG特征descriptor了。这个就是最终的可供分类使用的特征向量了。
这里只是简单讲一下提取 HOG 特征的步骤,具体操作见下面实验。
二、用 OpenCV 的仿射变换实现图片缩放
我们通常使用 2 x 3 矩阵来表示仿射变换.其中左边的2×2子矩阵是线性变换矩阵,右边的2×1的两项是平移项:

对于图像上的任一位置(x,y),仿射变换执行的是如下的操作:
我们要实现缩放,并不需要对图像进行平移,B矩阵中的值取0即可。接下来我们考虑怎么使用A矩阵实现缩放。
根据线性代数的知识,我们可以取a00和a11为0,取a01和a10相等,这样的话图像相当于没有旋转,而且每个像素点的横纵坐标都乘以了一个相同的值。设a01和a10的值为rate,乘以A矩阵之后,每个像素点的位置由(x, y)移到了(x*'rate, y*rate),即实现了缩放。
代码如下:
import numpy as np
import cv2 as cv
# Load an color image in grayscale
img = cv.imread('11.jpg')
rows, cols = img.shape[:2]
#缩放
rate = 0.5
np1 = np.float32([[rate, 0, 0], [0, rate, 0]])
dst4 = cv.warpAffine(img, np1, (int(cols*rate), int(rows*rate)))
rate = 2
np2 = np.float32([[rate, 0, 0], [0, rate, 0]])
dst5 = cv.warpAffine(img, np2, (int(cols*rate), int(rows*rate)))
cv.imshow('original',img)
cv.imshow('small',dst4)
cv.imshow('big',dst5)
cv.waitKey(0) # 无限制的等待用户的按键
cv.destroyAllWindows()
结果如下:
三、理解 HOG、ORC 过程,使用SVM 和 KNN 模型实现数字图像的识别
本实验的难点到了。
本实验的步骤十分简单,可以分为两个部分,提取数字图像的HOG特征,和放到分类器中进行训练分类。
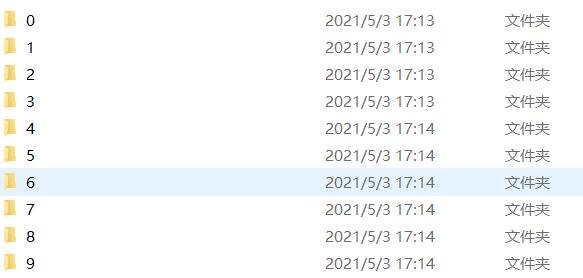
1.数字图像的类型
本次实验的数据集分为训练集和测试集两个部分,每一部分都包含十个文件夹,分别存有一定数量的数字图像,文件夹名称即是储存的数字图像中的数字。
训练集共包含10000张图片,测试集共包含5000张图片。每张图片的大小是28*28,与MNIST数据集图片相同。


2.提取数字图像的HOG特征
在前置知识中提到了提取图像 HOG 特征的步骤,下面是具体实现。
(1)读入图像
读取训练集和测试集中的每个图像,定义images列表存储图像的HOG特征,lables列表存储图像的分类。最后用numpy模块将列表转化为矩阵,以用于模型训练。
在读入图像时,首先要转化为灰度图像,之后进行偏斜校正,提取HOG特征值,降维等操作,下面来一一详解。
def data(path):
images = []
lables = []
indexs = os.listdir(path)
for index in indexs:
names = os.listdir(path + '\\\\' + index)
for name in names:
image_path = path + '\\\\' + index + '\\\\' + name
img = cv2.imread(image_path, 0)#灰度化
img_deskew = deskew(img)#偏斜校正
img_hsv = hog.compute(img_deskew)
images.append(np.squeeze(img_hsv))
lables.append(int(index))
return np.array(images), np.array(lables)
(2)偏斜校正
先解释一下矩特征:
从图像中计算出来的矩通常描述了图像不同种类的几何特征如:大小、灰度、方向、形状等,图像矩广泛应用于模式识别、目标分类、目标识别与防伪估计、图像编码与重构等领域。矩是概率与统计中的一个概念,是随机变量的一种数字特征。opencv中提供了moments()来计算图像中的中心矩(最高到三阶)。Opencv中的moments得到图像矩的字典,包括m00,m10,m01,m20,m11,m02,m30,m21,m12,m03,mu20,mu11,mu02,mu30,mu21,mu12,mu03,nu20,nu11,nu02,nu30,nu21,nu12,nu03。
也就是说调用‘cv.moments’函数,就能自动计算出图片的中心距。这里数字图像我们视为矩形,我们主要使用图片的二阶矩(mu02)判断图像中数字的方向。
代码如下,SZ为图片的长和宽。我们先利用‘cv2.threshold’函数对图片(传入函数的为灰度图)进行二值化处理,将大于等于127的值全改为255,小于127的值全改为0。该函数返回的第一个值就是输入的thresh值,第二个就是处理后的图像。
再利用‘cv2.findContours’函数来查找图像的轮廓,函数第一个参数是寻找轮廓的图像;第二个参数表示轮廓的检索模式,第三个参数method为轮廓的近似办法,这里不再详细说明。
‘cv2.findContours’函数返回两个值,一个是轮廓本身,还有一个是每条轮廓对应的属性。
我们利用计算出的轮廓,运用‘cv2.moments’函数计算图片的二阶矩,再进行判断,如果其小于0.01,认为图像没有偏斜,直接返回原图像。
否则利用仿射变换进行校正。
def deskew(img):
SZ = 28
ret, thresh = cv2.threshold(img, 127, 255, 0)
contours, hierarchy = cv2.findContours(thresh, 1, 2)
cnt = contours[0]
m = cv2.moments(cnt)
if abs(m['mu02']) < 1e-2:
# no deskewing needed.
return img.copy()
# Calculate skew based on central momemts.
skew = m['mu11']/m['mu02']
# Calculate affine transform to correct skewness.
M = np.float32([[1, skew, -0.5 * SZ * skew], [0, 1, 0]])
# Apply affine transform
img = cv2.warpAffine(img, M, (SZ, SZ), flags=cv2.WARP_INVERSE_MAP | cv2.INTER_LINEAR)
return img
(3)计算水平和垂直梯度
可以通过使用以下内核卷积图像来轻松实现。左下图为大小为1的内核,mag为梯度大小,ang为梯度方向的角度的弧度值。

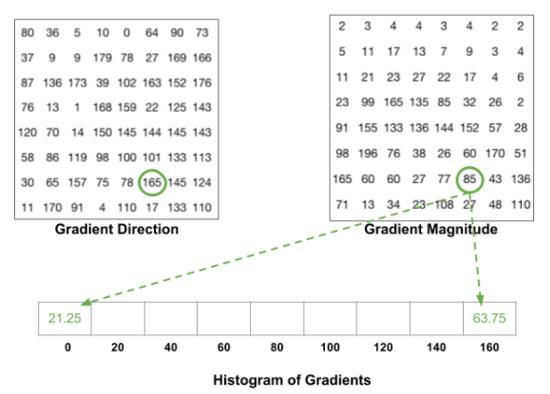
(4)计算梯度分布的直方图,梯度被分为9等分
以一个8*’8的cell为例,下图为RGB颜色向量的长度和方向的矩阵。我们将方向从0-180九等分,对于一个颜色向量的长度,我们根据其方向将其分在两个最近的梯度值上。对于一个cell中的每个像素点执行此操作,即可得到该cell的梯度分布直方图。
(5)向量归一化
在上一步中,我们基于图像的梯度创建了一个直方图。 图像的渐变对整体光照敏感。 如果通过将所有像素值除以2来使图像更暗,则梯度大小将改变一半,因此直方图值将改变一半。
理想情况下,我们希望描述符与照明变化无关。 换句话说,我们想“标准化”直方图,以使它们不受光照变化的影响。在解释如何对直方图进行归一化之前,让我们看看如何对长度为3的向量进行归一化。
假设我们有RGB颜色向量[128,64,32]。 此向量的长度为sqrt {128 ^ 2 + 64 ^ 2 + 32 ^ 2} = 146.64。 这也称为向量的L2范数。 将该向量的每个元素除以146.64,得出的归一化向量为[0.87,0.43,0.22]。
现在考虑另一个向量,其中元素是第一个向量的值的两倍2*[128,64,32] = [256,128,64]。 标准化[256,128,64]将产生[0.87,0.43,0.22],这与原始RGB向量的标准化版本相同。光照大小将不影响向量值。
(6)将向量分布直方图拼接并展开,得到最后的HOG特征值
(7)代码实现:
下面以(20,20)大小的图像为例,以(10,10)大小计算梯度分布直方图,Normalize大小也为(10,10)。
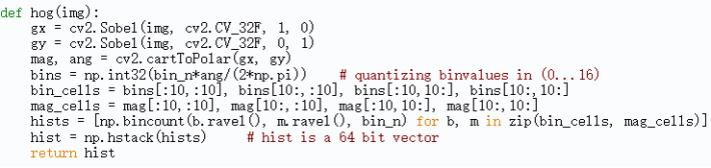
除了上述代码,我们也可以使用opencv自带的HOGDescriptor计算HOG特征值,调节winSize,blockSize等参数获得更好的效果。(本实验中笔者用的这种方法)
winSize = (28, 28)
blockSize = (14, 14)
blockStride = (7, 7)
cellSize = (14, 14)
nbins = 9
derivAperture = 1
winSigma = -1
histogramNormType = 0
L2HysThreshold = 0.2
gammaCorrection = 1
nlevels = 64
signedGradients = True
hog = cv2.HOGDescriptor(winSize, blockSize, blockStride,
cellSize, nbins, derivAperture,
winSigma, histogramNormType, L2HysThreshold,
gammaCorrection, nlevels, signedGradients)
这里是对各种参数的描述:
winSize:数字图像的大小为28×28,此处为整个图像计算一个描述符。
cellSize:图像是28×28灰度图像。换句话说,图像由28×28 = 784个像素点表示。cellSize是根据对分类重要的特征的比例来选择的。一个很小的cellSize会使特征向量的大小过大,而一个很大的cellSize可能无法捕获相关信息。这里我们选择了14×14的cellSize,可以尝试修改cellSize获得更好的效果。
blockSize:用于解决亮度变化影响gradient分布。较大的块大小会使本地像素变化的重要性降低,而较小的块大小会使本地像素变化的权重更大。通常,blockSize设置为2 x cellSize,因为在我们的数字分类图像中,亮度并不是很大的干扰项。因此14×14的块大小给出了最佳结果。
blockStride:blockStride确定相邻块之间的重叠并控制对比度归一化的程度。通常,将blockStride设置为blockSize的50%。
nbins:nbins设置渐变直方图中的bin数。 HOG论文的作者建议值为9,以20度为增量捕获0到180度之间的梯度。
signedGradients:通常,渐变可以具有0到360度之间的任何方向。这些梯度称为“有符号”梯度,与“无符号”梯度相反,“无符号”梯度使符号下降并采用0到180度之间的值。
3.训练模型并测试
(1) 获得训练数据和测试数据
直接使用上述data函数保存训练数据和测试数据,并打印出数据的大小。
这里要注意,训练数据和测试数据的维度应该均为2,且第一个维度为数据的数量。因此在data函数中加了一行降维代码“np.squeeze(img_hsv)”,将81*1的二维矩阵降维为一维矩阵。
train_data, train_lable = data('digit_data\\\\train')
print(train_data.shape)
images_test, lables_test = data('digit_data\\\\test')
print(images_test.shape)

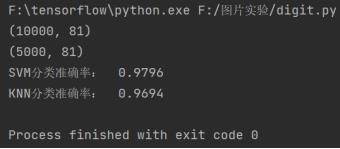
打印结果如下:

(2) 训练SVM模型并进行测试
直接带入SVM模型训练和测试模板即可。
clf = make_pipeline(StandardScaler(), SVC(gamma='auto'))
clf.fit(train_data, train_lable)
result = clf.predict(images_test)
correct = np.sum(result == lables_test)
print('SVM分类准确率: ', correct/len(images_test))
(3) 训练KNN模型并进行测试
同上:
neigh = KNeighborsClassifier(n_neighbors=3)
neigh.fit(train_data, train_lable)
result = neigh.predict(images_test)
correct = np.sum(result == lables_test)
print('KNN分类准确率: ', correct/len(images_test))
(4) 分类结果如下,效果很好。
四、使用 CNN 神经网络模型实现数字图像的识别
1.处理图像数据
使用 CNN 模型时,我们不需要提取 HOG 特征,只需灰度化即可。
def data(path):
images = []
lables = []
indexs = os.listdir(path)
for index in indexs:
names = os.listdir(path + '\\\\' + index)
for name in names:
image_path = path + '\\\\' + index + '\\\\' + name
img = cv2.imread(image_path, 0)
images.append(np.array(img))
lables.append(index)
return np.array(images), np.array(lables)
将图片读入矩阵之后,进行归一化操作,除于255。再对矩阵升维,由三维升为四维。
另外还要对分类标签进行one-hot编码。
if __name__ == "__main__":
x_train, y_train = data('digit_data\\\\train')
x_test, y_test = data('digit_data\\\\test')
x_train = x_train.astype('float32')
x_test = x_test.astype('float32')
x_train = x_train / 255.0
x_test = x_test / 255.0
x_train = x_train.reshape(x_train.shape[0], 28, 28, 1)
y_train = keras.utils.to_categorical(y_train, 10)
x_test = x_test.reshape(x_test.shape[0], 28, 28, 1)
y_test = keras.utils.to_categorical(y_test, 10)
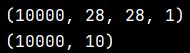
print (x_train.shape)
print (y_train.shape)
打印结果如下:
2.设置模型,训练模型
CNN框架图如下:
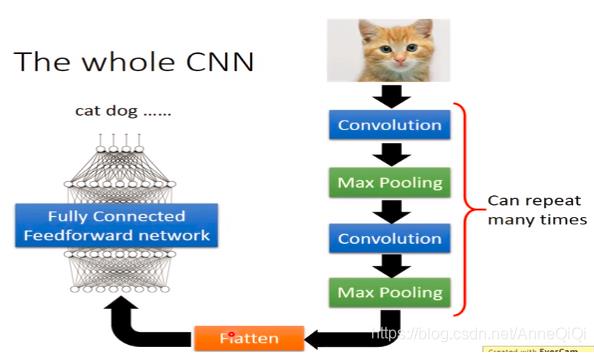
简单来说,卷积层用来提取特征,而池化层可以减少参数数量。
pooling池化的作用则体现在降采样:保留显著特征、降低特征维度,增大kernel的感受野。另外一点值得注意:pooling也可以提供一些旋转不变性。
实验中我们使用两对卷积、池化层。
我们设置卷积核为大小为5*5,第一层卷积层使用32个卷积核,第二层卷积层使用64个卷积核。
Padding选择补0使得卷积后的激活映射尺寸不变。
激活函数我们使用‘relu’。
池化层我们使用最大池化(Max Pooling),取一个区域内所有神经元的最大值。
最后添加两个全连接层。设置损失函数,评估标准后,模型设置完毕。
使用 ‘model.fit’进行模型训练。
#build the model
model = Sequential()
model.add(Conv2D(32,(5,5),activation = 'relu',input_shape = (28,28,1),padding='same'))
model.add(MaxPooling2D(pool_size = (2,2)))
model.add(Conv2D(64,(5,5),activation = 'relu',padding='same'))
model.add(MaxPooling2D(pool_size = (2,2)))
model.add(Flatten())
model.add(Dense(1024,activation = 'relu'))
model.add(Dense(10,activation = 'softmax'))
sgd = optimizers.SGD(lr=0.01, decay=1e-6, momentum=0.9, nesterov=True)
model.compile(loss=keras.losses.categorical_crossentropy,optimizer=sgd,metrics=['accuracy'])
model.fit(x_train, y_train, batch_size = 100, epochs = 14)
看不太懂的童鞋可以去找一些讲cnn结构的博客来读

3.保存模型
使用 ‘model.save_weights’ 保存模型的权重;使用’model.load_weight’加载模型的权重。
训练模型时注释掉加载模型的代码;
加载模型时注释掉‘model.fit’训练模型和‘model.save’保存模型权重的代码。
# save architecture
model.save_weights('CNN_model')
#load
#model.load_weights('cnn_model')
4.测试模型
使用测试集进行模型的测试,输出测试结果。
score = model.evaluate(x_test, y_test)
print ("loss: "+str(score[0]))
print ("accuracy: "+str(score[1]))
打印结果如下,准确率为97.74%.

五、代码总和
又到了大家最喜欢的代码环节
1.图片缩放
前面放过完整代码了,大家动动手去前面翻一下
2.使用 SVM 和 KNN 模型实现数字图像识别
from sklearn.svm import SVC
from sklearn.pipeline import make_pipeline
from sklearn.preprocessing import StandardScaler
from sklearn.neighbors import KNeighborsClassifier
import os
import cv2
import numpy as np
winSize = (28, 28)
blockSize = (14, 14)
blockStride = (7, 7)
cellSize = (14, 14)
nbins = 9
derivAperture =