图像基本知识整理——图像几何变换
Posted Lyndon_zheng
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了图像基本知识整理——图像几何变换相关的知识,希望对你有一定的参考价值。
一、图像平移 图像平移是指将图像中的所有像素点按指定方向平移的一种变换。只改变图像在屏幕上的位置,图像本身不变。其实质是一种坐标变换。 1、基本原理 设图像中某点的原始坐标为(x0,y0),平移量分别为Xset和Yset的距离,平移后的点为(x1,y1),则平移后的坐标关系为: x1=x0+Xsety1=y0+Yset
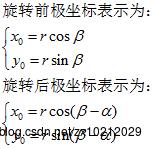
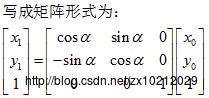
二、图像旋转 图像的旋转是图像校准,图像识别常用的一种技术。其本质是以图像的中心为原点,将图像上的所有的点都旋转相同的角度。 1、基本原理 设图像中某点的原始坐标为 (x0,y0),旋转角度为a,旋转后的点为(x1,y1),则平移后的坐标关系为:
 三、图像缩放
图像缩放是一种非常有用的图像处理方式,不管是在像素级别的处理,还是在高层特征提取等方面,多尺度对比的思想都有很重要的作用。
1、基本原理
设图像中某点的原始坐标为
(x0,y0),缩放量分别为ZoomX和YoomY的距离,缩放后的点为(x1,y1),则缩放后的坐标关系为:
三、图像缩放
图像缩放是一种非常有用的图像处理方式,不管是在像素级别的处理,还是在高层特征提取等方面,多尺度对比的思想都有很重要的作用。
1、基本原理
设图像中某点的原始坐标为
(x0,y0),缩放量分别为ZoomX和YoomY的距离,缩放后的点为(x1,y1),则缩放后的坐标关系为:
x1=x0 *ZoomX
y1=y0 *ZoomY 四、插值算法 在实际操作中,缩放和旋转等几何变换会导致目标图像和原始像素点之间的关系不能相互对应,这时就需要运用插值算法来填补不能对应的点。在课程中,用到了最近邻插值、双线性插值和立方卷积插值。 1、最近邻插值 最近邻插值简单来说就是通过逆向运算得到一个浮点坐标,对浮点坐标进行取整后,在原图中找到与之相对应的像素作为目标像素。 算法实现:
for (i = 0; i<h_c - 1; i++)
for (j = 0; j<w_c - 1; j++)
int i0, j0;
i0 = (int)(i / mmultiple + 0.5);
j0 = (int)(j / mmultiple + 0.5);
if ((i0 >= 0) && (i0<h) && (j0 >= 0) && (j0<w))
::memcpy((unsigned char*)(lpDIBBitsNew + i*lineByte_c + j * 3), (unsigned char*)(lpDIBBits + i0*lineByte + j0 * 3), 3);//复制图像信息
else
::memset((unsigned char*)(lpDIBBitsNew + i*lineByte_c + j * 3), 255, 3);
2、双线性插值 双线性插值算法是根据输出图像的宽度和高度将输入图像的宽度和高度进行均分,进而确定输出图像值的方法。
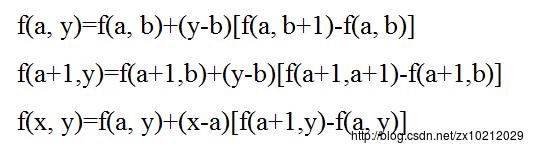
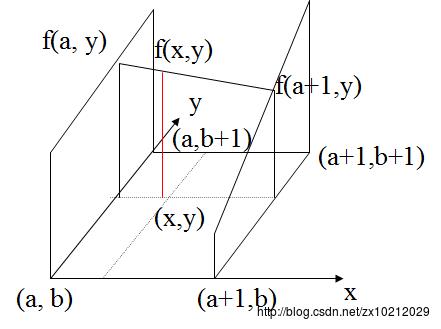 其中(x,y)为目标图像坐标,(a,b)为原始图像坐标,f(x,y)表示该点的像素值。
其中(x,y)为目标图像坐标,(a,b)为原始图像坐标,f(x,y)表示该点的像素值。
 算法实现:
算法实现:
for (i = 0; i<h_c - 1; i++)
for (j = 0; j<w_c - 1; j++)
i0 = (int)(i / mmultiple + 0.5);
j0 = (int)(j / mmultiple + 0.5);
s1 = (i / 2.0 - i0)*(j / 2.0 - j0);
s2 = (1.0 - i / 2.0 + i0)*(j / 2.0 - j0);
s3 = (1.0 - i / 2.0 + i0)*(1.0 - j / 2.0 + j0);
s4 = (i / 2.0 - i0)*(1.0 - j / 2.0 + j0);
if ((i0 >= 0) && (i0<h) && (j0 >= 0) && (j0<w))
*(lpDIBBitsNew + i*lineByte_c + j * 3) = char(s1**(lpDIBBits + i0*lineByte + j0 * 3) + s2**(lpDIBBits + i0*lineByte + (j0 + 1) * 3)
+ s3**(lpDIBBits + (i0 + 1)*lineByte + j0 * 3) + s4**(lpDIBBits + (i0 + 1)*lineByte + (j0 + 1) * 3));
*(lpDIBBitsNew + i*lineByte_c + j * 3 + 1) = char(s1**(lpDIBBits + i0*lineByte + j0 * 3 + 1) + s2**(lpDIBBits + i0*lineByte + (j0 + 1) * 3 + 1)
+ s3**(lpDIBBits + (i0 + 1)*lineByte + j0 * 3 + 1) + s4**(lpDIBBits + (i0 + 1)*lineByte + (j0 + 1) * 3 + 1));
*(lpDIBBitsNew + i*lineByte_c + j * 3 + 2) = char(s1**(lpDIBBits + i0*lineByte + j0 * 3 + 2) + s2**(lpDIBBits + i0*lineByte + (j0 + 1) * 3 + 2)
+ s3**(lpDIBBits + (i0 + 1)*lineByte + j0 * 3 + 2) + s4**(lpDIBBits + (i0 + 1)*lineByte + (j0 + 1) * 3 + 2));
else
::memset((unsigned char*)(lpDIBBitsNew + i*lineByte_c + j * 3), 255, 3);
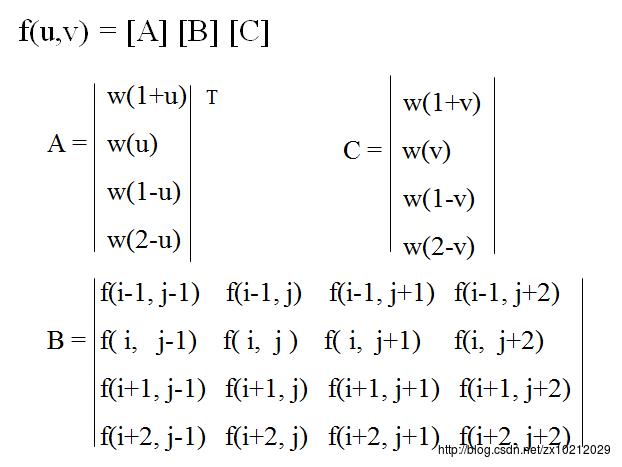
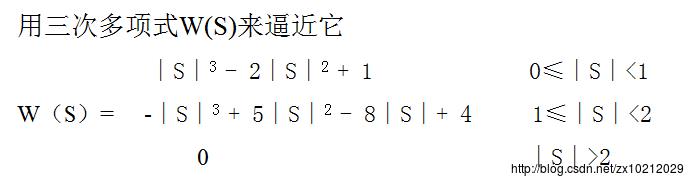
其中w为插值逼近函数。
算法实现:
for (i = 0; i<h_c - 1; i++)
for (j = 0; j<w_c - 1; j++)
x = i / mmultiple; y = j / mmultiple; Ix = (int)x; Iy = (int)y; u = x - Ix; v = y - Iy;
A[0] = w_f(1 + u); A[1] = w_f(u); A[2] = w_f(1 - u); A[3] = w_f(2 - u);
C[0] = w_f(1 + v); C[1] = w_f(v); C[2] = w_f(1 - v); C[3] = w_f(2 - v);
for (k = 0; k<3; k++)
if ((Ix >= 0) && (Ix<h) && (Iy >= 0) && (Iy<w))
B[0][0] = *(lpDIBBits + (Ix - 1)*lineByte + (Iy - 1) * 3 + k); B[0][1] = *(lpDIBBits + (Ix - 1)*lineByte + (Iy)* 3 + k);
B[0][2] = *(lpDIBBits + (Ix - 1)*lineByte + (Iy + 1) * 3 + k); B[0][3] = *(lpDIBBits + (Ix - 1)*lineByte + (Iy + 2) * 3 + k);
B[1][0] = *(lpDIBBits + (Ix)*lineByte + (Iy - 1) * 3 + k); B[1][1] = *(lpDIBBits + (Ix)*lineByte + (Iy)* 3 + k);
B[1][2] = *(lpDIBBits + (Ix)*lineByte + (Iy + 1) * 3 + k); B[1][3] = *(lpDIBBits + (Ix)*lineByte + (Iy + 2) * 3 + k);
B[2][0] = *(lpDIBBits + (Ix + 1)*lineByte + (Iy - 1) * 3 + k); B[2][1] = *(lpDIBBits + (Ix + 1)*lineByte + (Iy)* 3 + k);
B[2][2] = *(lpDIBBits + (Ix + 1)*lineByte + (Iy + 1) * 3 + k); B[2][3] = *(lpDIBBits + (Ix + 1)*lineByte + (Iy + 2) * 3 + k);
B[3][0] = *(lpDIBBits + (Ix + 2)*lineByte + (Iy - 1) * 3 + k); B[3][1] = *(lpDIBBits + (Ix + 2)*lineByte + (Iy)* 3 + k);
B[3][2] = *(lpDIBBits + (Ix + 2)*lineByte + (Iy + 1) * 3 + k); B[3][3] = *(lpDIBBits + (Ix + 2)*lineByte + (Iy + 2) * 3 + k);
for (i1 = 0; i1<4; i1++)
M[i1] = 0;
for (i1 = 0; i1<4; i1++)
for (j1 = 0; j1<4; j1++)
M[i1] += A[j1] * B[j1][i1];
middle = 0;
for (i1 = 0; i1<4; i1++)
middle += M[i1] * C[i1];
*(lpDIBBitsNew + i*lineByte_c + j * 3 + k) = (int)(middle + 0.5);
if (*(lpDIBBitsNew + i*lineByte_c + j * 3 + k) > 255)
*(lpDIBBitsNew + i*lineByte_c + j * 3 + k) = 255;
if (*(lpDIBBitsNew + i*lineByte_c + j * 3 + k) < 0)
*(lpDIBBitsNew + i*lineByte_c + j * 3 + k) = 0;
else
*(lpDIBBitsNew + i*lineByte_c + j * 3 + k) = *(lpDIBBits + (int)(i / 2.0 + 0.5)*lineByte + (int)(j / 2.0 + 0.5) * 3 + k);
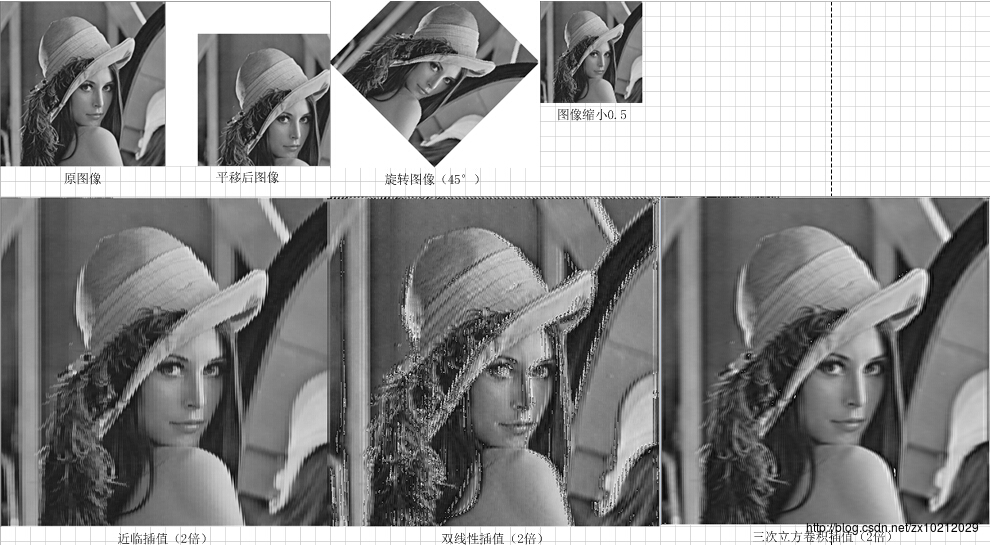
通过效果图我们可以看到,近临插值有不连续的地方,而双线性插值在边缘较多的地方会形成模糊,使边缘信息丢失。三次立方卷积的效果比较好,但是在实际计算时比较费时。
以上是关于图像基本知识整理——图像几何变换的主要内容,如果未能解决你的问题,请参考以下文章