飞行机器人DJI平台OSDK ROS 编译及使用
Posted Techblog of HaoWANG
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了飞行机器人DJI平台OSDK ROS 编译及使用相关的知识,希望对你有一定的参考价值。
系列文章目录
第一章 飞行机器人(一)DJI平台OSDK简介飞行机器人(一)DJI平台OSDK简介_Techblog of HaoWANG-CSDN博客DJI OSDK/OSDK-ROS for M600Pro技术文档 Version 2.1.1 https://haowang.blog.csdn.net/article/details/122336345
https://haowang.blog.csdn.net/article/details/122336345
第二章 飞行机器人(二)DJI平台软硬件连接
目录
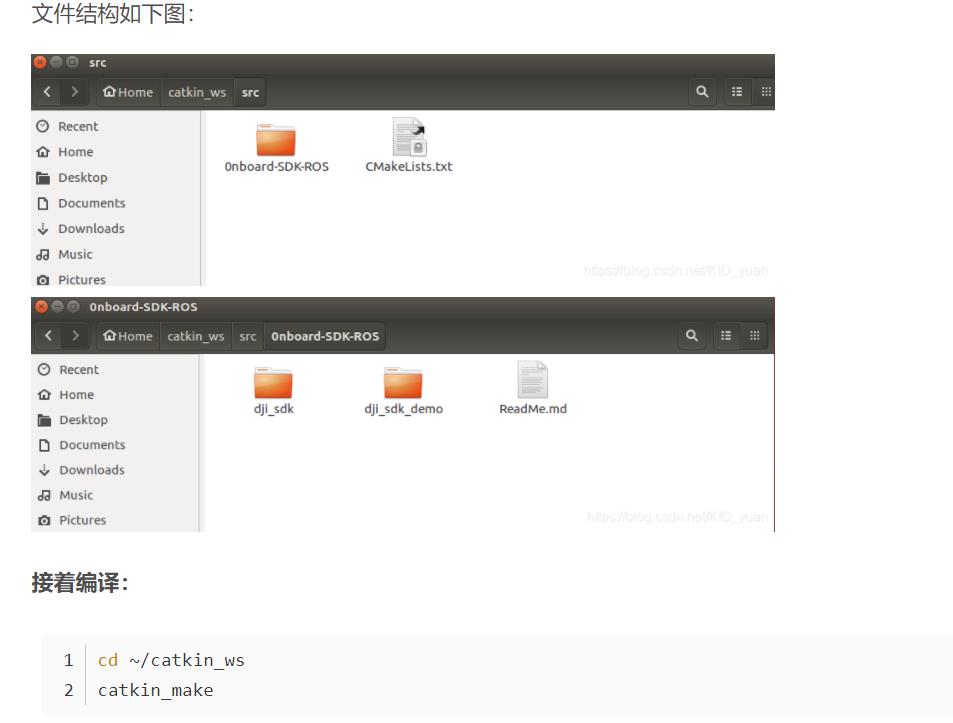
1. 源码编译
https://github.com/dji-sdk/Onboard-SDK-ROS https://github.com/dji-sdk/Onboard-SDK-ROS
https://github.com/dji-sdk/Onboard-SDK-ROS
注意:在4.1.0版本的osdk_ros中,仍然支持3.8.1版本的M100、M600、A3\\N3飞控,但是需要运行dji_sdk_node用于发布传感器数据,使用新版本的功能demo处理相应数据,完成功能任务。

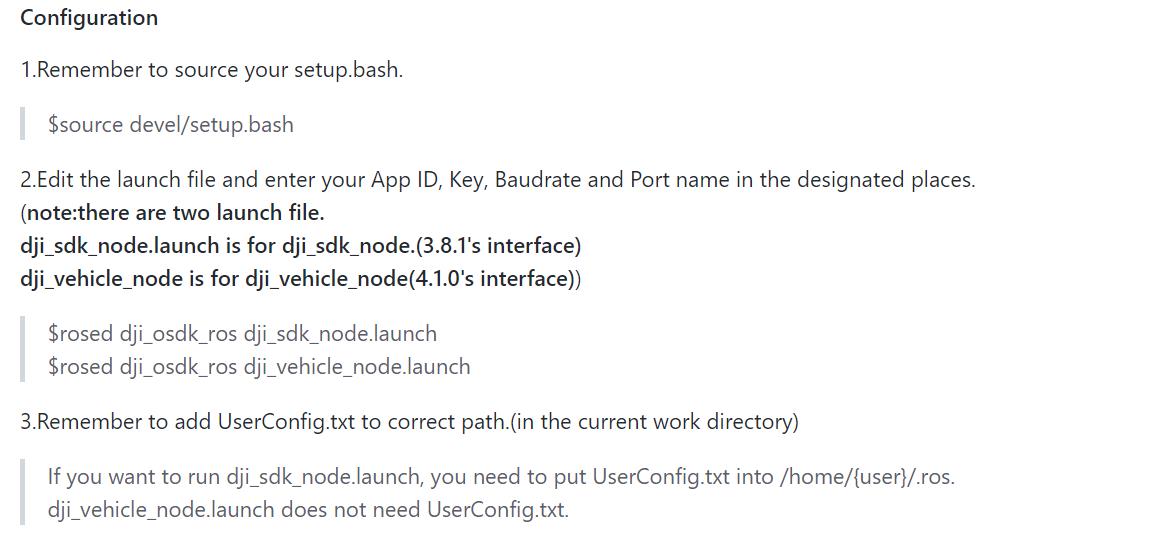
2. Configuration配置文件
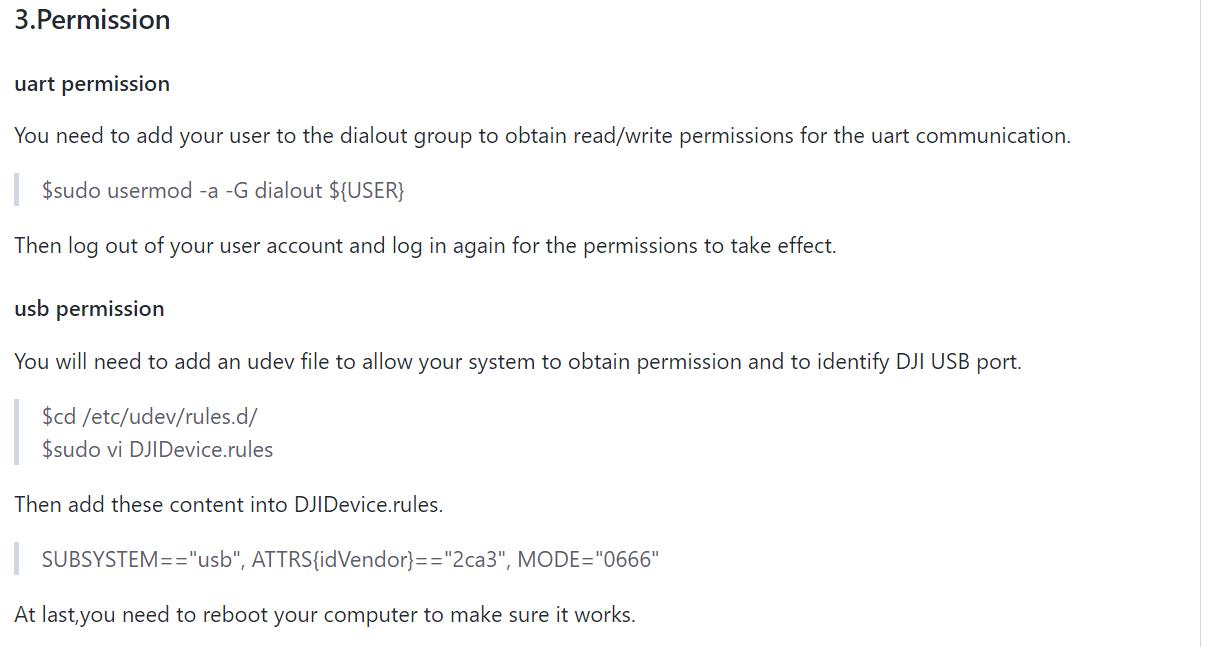
You will need to add an udev file to allow your system to obtain permission and to identify DJI USB port.
>$cd /etc/udev/rules.d/
>$sudo vi DJIDevice.rules
Then add these content into DJIDevice.rules.
>SUBSYSTEM=="usb", ATTRSidVendor=="2ca3", MODE="0666"
Remember to add UserConfig.txt to correct path.(in the current work directory)
>If you want to run dji_sdk_node.launch, you need to put UserConfig.txt into /home/user/.ros.
>dji_vehicle_node.launch does not need UserConfig.txt.3. 测试dji_ros_osdk
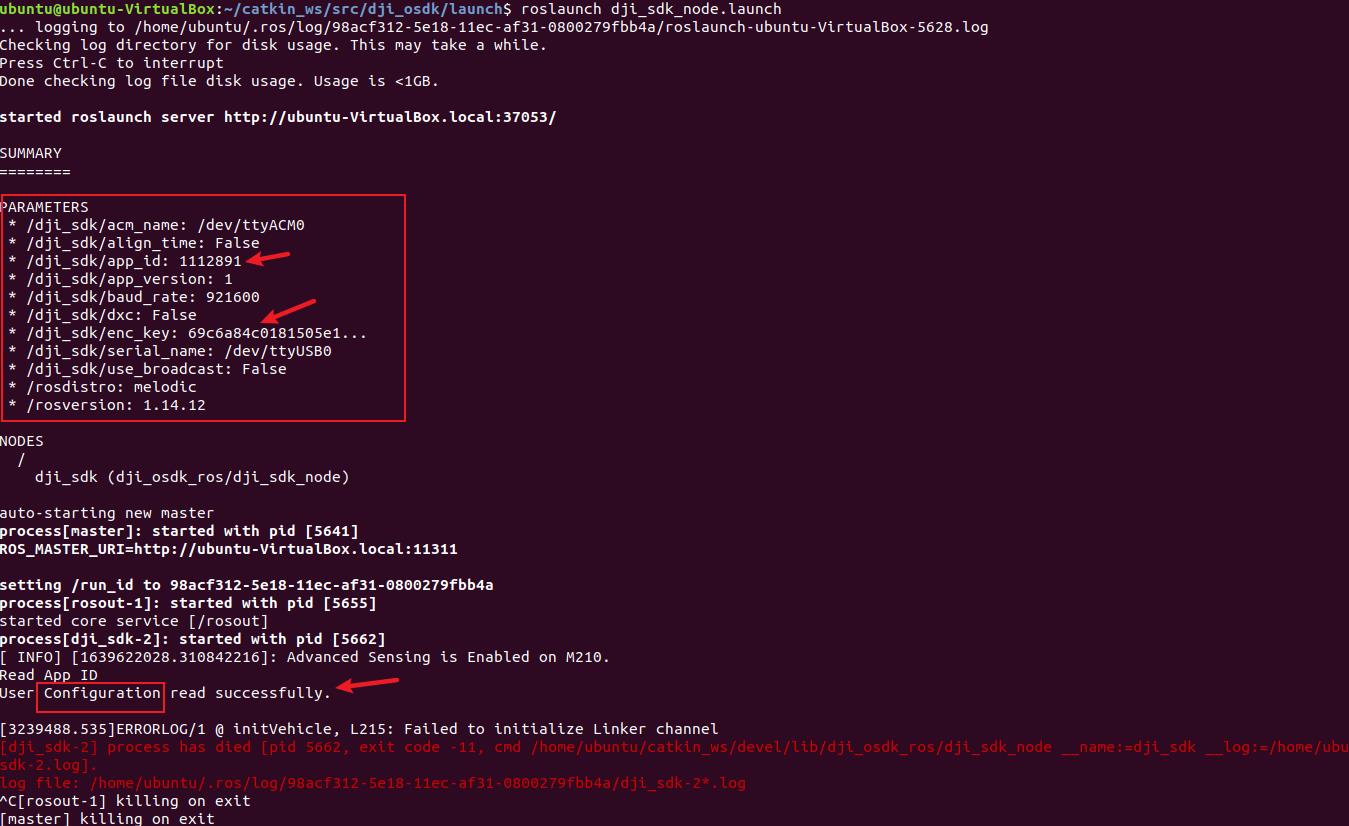
USB2TTL端口权限
注意:节点无法启动时请检查是否USB2TTL线序接反,或者调参软件已经调整至API智能控制模式等。
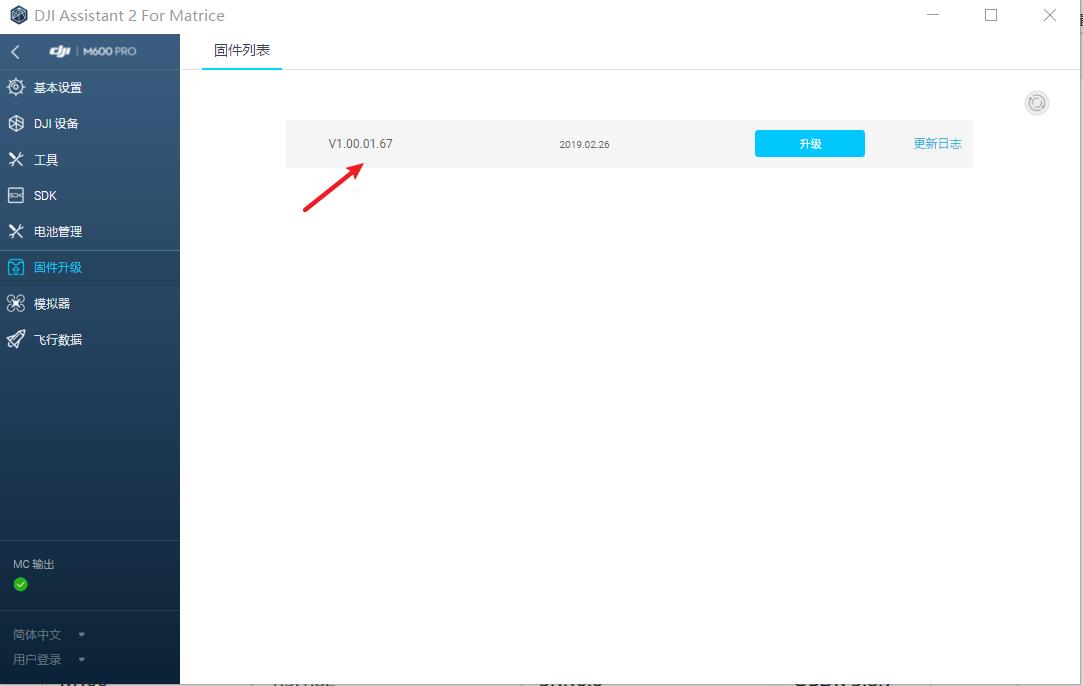
4. 调参软件配置
20211231固件版本信息
飞控参数信息

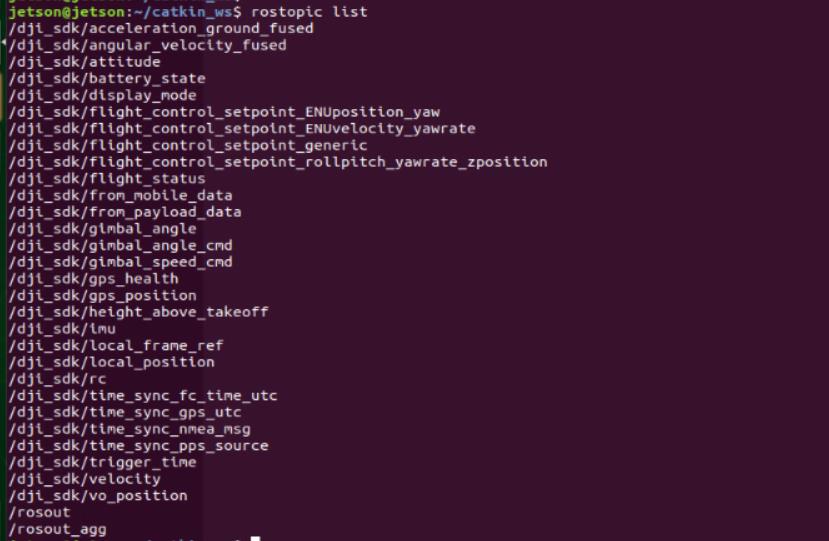
DJI_OSDK_ROS 常用Topic
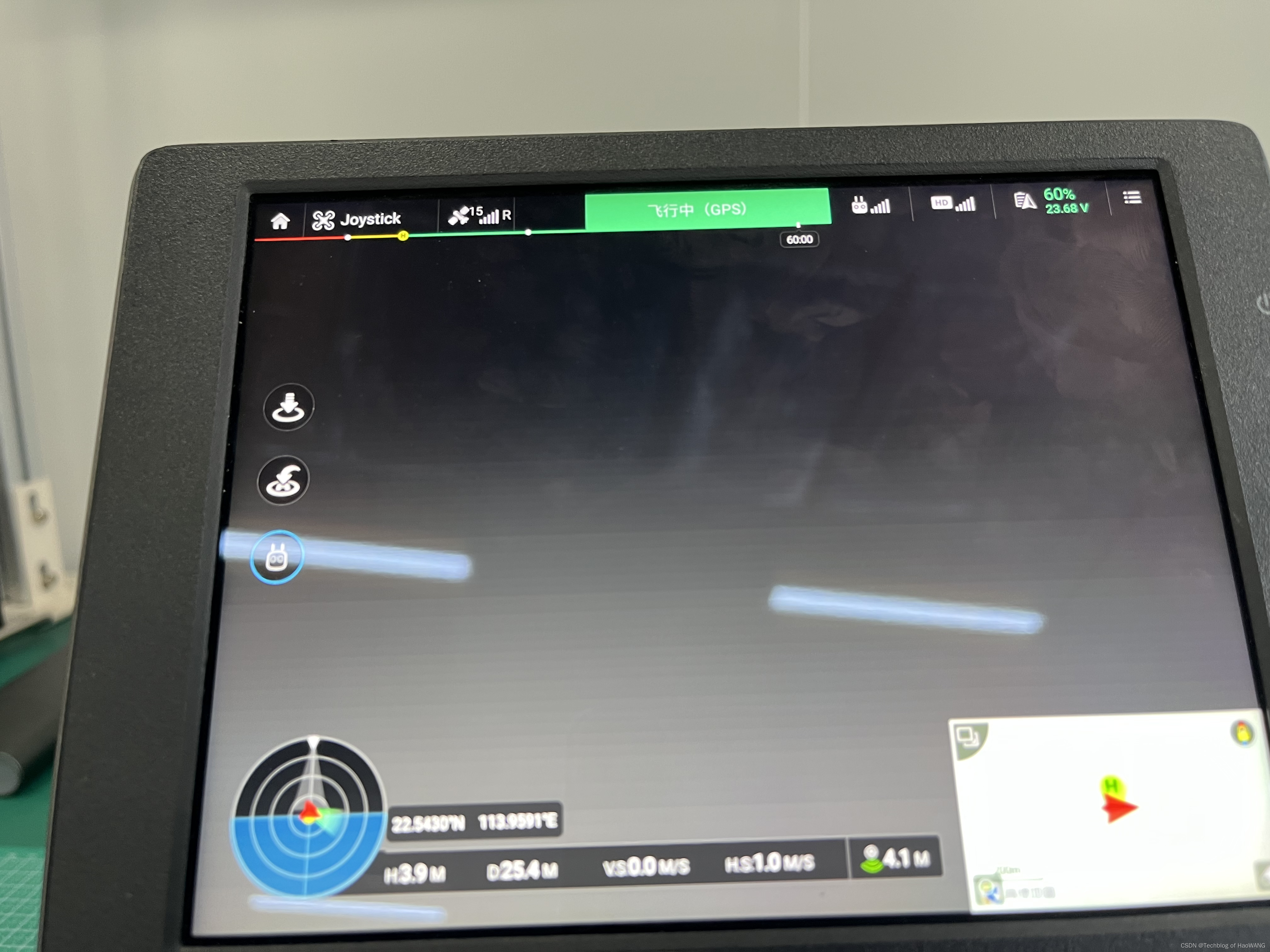
5. DJI飞行仿真
在配置好飞控参数后,上位机NX运行OSDK ROS示例程序,在地面站DJI Assistant软件中打开模拟器,设置模拟器参数并开始仿真试验。


- 云台姿态读取
- topic名称:/dji_osdk_ros/gimbal_angle
- 类型:geometry_msgs/Vector3Stamped
- 内容:
- msg.vector.x # pitch,单位:度
msg.vector.y # roll
msg.vector.z # yaw
- 飞行状态读取
- topic名称:/dji_osdk_ros/flight_status
- 变量类型:std_msgs/Uint8
- 内容:
- data # 0,在地面上;1,电机解锁;2,在空中
- RTK经纬度读取
- topic名称:/dji_osdk_ros/rtk_position
- 变量类型:sensor_msgs/NavSatFix
- 频率:有RTK信息时,10Hz;无RTK信息时,全为0
- 内容:
- float64 latitude
float64 longitude
float64 altitude // 海拔
float64[9] position_covariance // 方差
uint8 position_covariance_type
- RTK速度读取
- topic名称:/dji_osdk_ros/rtk_velocity
- 变量类型:geometry_msgs/Vector3Stamped
- 频率:10Hz
- 内容:
- # 东北天全局坐标系
msg.vector.x
msg.vector.y
msg.vector.z
- RTK偏航
- topic名称:/dji_osdk_ros/rtk_yaw
- 变量类型:std_msgs/Int16
- 内容:
- msg.data # 单位:度
- 超声波高度
- topic名称:/dji_osdk_ros/height_above_takeoff
- 变量类型:std_msgs/Float32
- 要点:高于10米就超过测量范围,此值会变为0,10米以内的精度还算准确
- GPS位置
- topic名称:/dji_osdk_ros/gps_position
- 变量类型:sensor_msgs/NavSatFix
- 要点:其中海拔的测量误差非常大,不建议使用此海拔数据;融合数据的高度会受到影响:湿度、温度、水平移动距离等
- 相机视频流
- topic名称:dji_osdk_ros/main_camera_images
- 类型:sensor_msgs/Image
- 要点1:需要用cvbridge来做图像类型的转换
- 要点2:经测试,图像传输时延在2秒钟左右,建议使用Ros image transport,可将时延控制在0.5秒左右
- 磁力计位置
- topic名称:/dji_osdk_ros/vo_position
- 内容:由磁力计得到的位置,非常不准,不建议使用
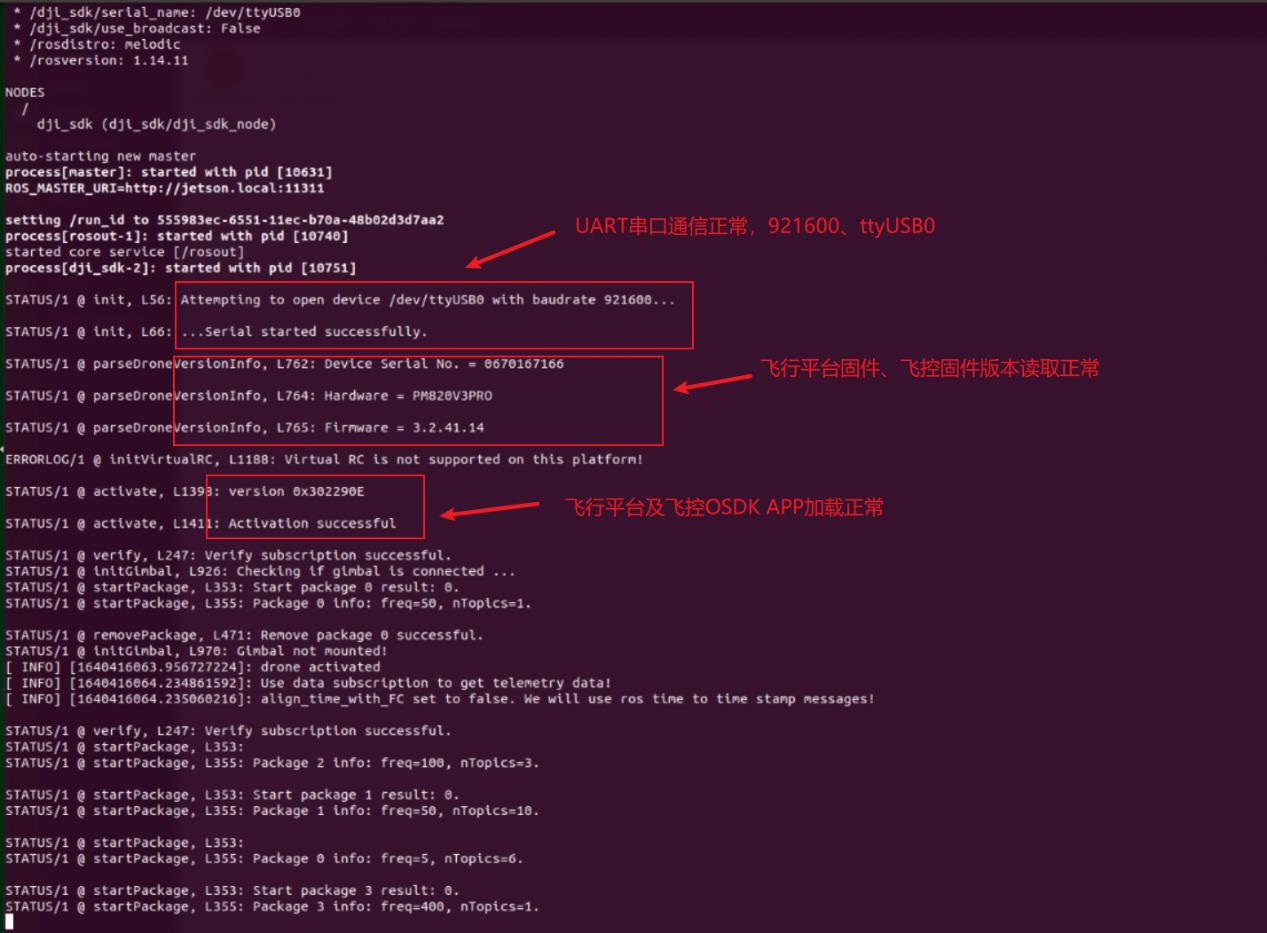
- ROS logging info
roslaunch dji_sdk sdk.launch
... logging to /home/jetson/.ros/log/2a1e0ccc-6e05-11ec-9edf-48b02d3d7aa2/roslaunch-jetson-30162.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://jetson.local:46117/
SUMMARY
========
PARAMETERS
* /dji_sdk/align_time: False
* /dji_sdk/app_id: 1112891
* /dji_sdk/app_version: 1
* /dji_sdk/baud_rate: 921600
* /dji_sdk/enc_key: 69c6a84c0181505e1...
* /dji_sdk/serial_name: /dev/ttyUSB1
* /dji_sdk/use_broadcast: False
* /rosdistro: melodic
* /rosversion: 1.14.11
NODES
/
dji_sdk (dji_sdk/dji_sdk_node)
auto-starting new master
process[master]: started with pid [30585]
ROS_MASTER_URI=http://jetson.local:11311
setting /run_id to 2a1e0ccc-6e05-11ec-9edf-48b02d3d7aa2
process[rosout-1]: started with pid [30759]
started core service [/rosout]
process[dji_sdk-2]: started with pid [30784]
STATUS/1 @ init, L55: Attempting to open device /dev/ttyUSB1 with baudrate 921600...
STATUS/1 @ init, L65: ...Serial started successfully.
STATUS/1 @ parseDroneVersionInfo, L727: Device Serial No. = 0670167166
STATUS/1 @ parseDroneVersionInfo, L729: Hardware = PM820V3PRO
STATUS/1 @ parseDroneVersionInfo, L730: Firmware = 3.2.41.14
ERRORLOG/1 @ initVirtualRC, L1103: Virtual RC is not supported on this platform!
STATUS/1 @ activate, L1313: version 0x302290E
STATUS/1 @ activate, L1326: Activation successful
STATUS/1 @ verify, L244: Verify subscription successful.
STATUS/1 @ initGimbal, L890: Checking if gimbal is connected ...
STATUS/1 @ startPackage, L350: Start package 0 result: 0.
STATUS/1 @ startPackage, L352: Package 0 info: freq=50, nTopics=1.
STATUS/1 @ removePackage, L468: Remove package 0 successful.
STATUS/1 @ initGimbal, L934: Gimbal not mounted!
[ INFO] [1641372910.257464776]: drone activated
[ INFO] [1641372910.525424040]: Use data subscription to get telemetry data!
[ INFO] [1641372910.525575400]: align_time_with_FC set to false. We will use ros time to time stamp messages!
STATUS/1 @ verify, L244: Verify subscription successful.
STATUS/1 @ startPackage, L350: Start package 2 result: 0.
STATUS/1 @ startPackage, L352: Package 2 info: freq=100, nTopics=3.
STATUS/1 @ startPackage, L350: Start package 1 result: 0.
STATUS/1 @ startPackage, L352: Package 1 info: freq=50, nTopics=10.
[ INFO] [1641372910.621151240]: -----With DJI M600 Pro D-RTK STATE CHECK DEBUG----
[ INFO] [1641372910.621337000]: ------RTK STATE CHECK DEBUG----
[ INFO] [1641372910.621647656]: -----Flight Controller does not support RTK
STATUS/1 @ startPackage, L350: Start package 0 result: 0.
STATUS/1 @ startPackage, L352: Package 0 info: freq=5, nTopics=6.
STATUS/1 @ startPackage, L350: Start package 3 result: 0.
STATUS/1 @ startPackage, L352: Package 3 info: freq=400, nTopics=1.
- OSDK logging info
/djiosdk-telemetry-sample UserConfig.txt
Read App ID
User Configuration read successfully.
STATUS/1 @ init, L55: Attempting to open device /dev/ttyUSB1 with baudrate 921600...
STATUS/1 @ init, L65: ...Serial started successfully.
STATUS/1 @ parseDroneVersionInfo, L727: Device Serial No. = 0670167166
STATUS/1 @ parseDroneVersionInfo, L729: Hardware = PM820V3PRO
STATUS/1 @ parseDroneVersionInfo, L730: Firmware = 3.2.41.14
STATUS/1 @ removePackage, L468:
ERRORLOG/1 @ removeLeftOverPackages, L499: failed to remove package 0
STATUS/1 @ removePackage, L468: Remove package 1 successful.
ERRORLOG/1 @ removeLeftOverPackages, L499: failed to remove package 1
STATUS/1 @ removePackage, L468: Remove package 2 successful.
ERRORLOG/1 @ removeLeftOverPackages, L499: failed to remove package 2
STATUS/1 @ removePackage, L468: Remove package 3 successful.
ERRORLOG/1 @ removeLeftOverPackages, L499: failed to remove package 3
STATUS/1 @ removePackage, L468: Remove package 4 successful.
ERRORLOG/1 @ removeLeftOverPackages, L499: failed to remove package 4
ERRORLOG/1 @ initVirtualRC, L1103: Virtual RC is not supported on this platform!
STATUS/1 @ activate, L1313: version 0x302290E
STATUS/1 @ activate, L1326: Activation successful
STATUS/1 @ verify, L244: Verify subscription successful.
STATUS/1 @ initGimbal, L890: Checking if gimbal is connected ...
STATUS/1 @ startPackage, L350: Start package 0 result: 0.
STATUS/1 @ startPackage, L352: Package 0 info: freq=50, nTopics=1.
STATUS/1 @ removePackage, L468: Remove package 0 successful.
STATUS/1 @ initGimbal, L934: Gimbal not mounted!
| Available commands: |
| [a] Get telemetry data and print |
| [b] Select some subscription topics to print |
| [c] Get telemetry data and save to file |
a
STATUS/1 @ verify, L244: Verify subscription successful.
STATUS/1 @ startPackage, L350: Start package 0 result: 0.
STATUS/1 @ startPackage, L352: Package 0 info: freq=1, nTopics=1.
STATUS/1 @ startPackage, L350: Start package 1 result: 0.
STATUS/1 @ startPackage, L352: Package 1 info: freq=10, nTopics=2.
STATUS/1 @ startPackage, L350: Start package 2 result: 0.
STATUS/1 @ startPackage, L352: Package 2 info: freq=50, nTopics=2.
STATUS/1 @ startPackage, L350: Start package 3 result: 0.
STATUS/1 @ startPackage, L352: Package 3 info: freq=200, nTopics=1.
STATUS/1 @ startPackage, L350: Start package 4 result: 0.
STATUS/1 @ startPackage, L352: Package 4 info: freq=5, nTopics=5.
Counter = 0:
-------
Flight Status = 0
Position (LLA) = 0.401793, 1.97631, -35.3228
RC Commands (r/p/y/thr) = 0, 0, 0, 0
Velocity (vx,vy,vz) = 3.49576e-05, -0.000171653, -0.000144877
Attitude Quaternion (w,x,y,z) = 0.407821, -0.0157919, 0.00243199, 0.912922
RTK if available (lat/long/alt/velocity_x/velocity_y/velocity_z/yaw/yaw_info/pos_info) =23.0211,113.234,23.5765,1.19665,-0.785867,-3.88101,23,"2
-------
Counter = 5:
-------
Flight Status = 0
Position (LLA) = 0.401793, 1.97631, -35.3228
RC Commands (r/p/y/thr) = 0, 0, 0, 0
Velocity (vx,vy,vz) = 3.49576e-05, -0.000171653, -0.000144877
Attitude Quaternion (w,x,y,z) = 0.407821, -0.0157919, 0.00243199, 0.912922
RTK if available (lat/long/alt/velocity_x/velocity_y/velocity_z/yaw/yaw_info/pos_info) =23.0211,113.234,23.5765,1.19665,-0.785867,-3.88101,23,"2
-------
Counter = 10:
-------
Flight Status = 0
Position (LLA) = 0.401793, 1.97631, -35.3228
RC Commands (r/p/y/thr) = 0, 0, 0, 0
Velocity (vx,vy,vz) = 7.44809e-05, -0.000332033, -0.000386053
Attitude Quaternion (w,x,y,z) = 0.407821, -0.0157947, 0.00244076, 0.912922
RTK if available (lat/long/alt/velocity_x/velocity_y/velocity_z/yaw/yaw_info/pos_info) =23.0211,113.234,23.5737,-0.0331256,0.333299,0.640153,22,"2
-------
Counter = 15:
-------
Flight Status = 0
Position (LLA) = 0.401793, 1.97631, -35.3228
RC Commands (r/p/y/thr) = 0, 0, 0, 0
Velocity (vx,vy,vz) = 7.44809e-05, -0.000332033, -0.000386053
Attitude Quaternion (w,x,y,z) = 0.407821, -0.0157947, 0.00244076, 0.912922
RTK if available (lat/long/alt/velocity_x/velocity_y/velocity_z/yaw/yaw_info/pos_info) =23.0211,113.234,23.5737,-0.0331256,0.333299,0.640153,22,"2
-------
Counter = 20:
-------
Flight Status = 0
Position (LLA) = 0.401793, 1.97631, -35.3228
RC Commands (r/p/y/thr) = 0, 0, 0, 0
Velocity (vx,vy,vz) = 7.44809e-05, -0.000332033, -0.000386053
Attitude Quaternion (w,x,y,z) = 0.407821, -0.0157947, 0.00244076, 0.912922
RTK if available (lat/long/alt/velocity_x/velocity_y/velocity_z/yaw/yaw_info/pos_info) =23.0211,113.234,23.5737,-0.0331256,0.333299,0.640153,22,"2
-------
Counter = 25:
-------
Flight Status = 0
Position (LLA) = 0.401793, 1.97631, -35.3228
RC Commands (r/p/y/thr) = 0, 0, 0, 0
Velocity (vx,vy,vz) = 7.44809e-05, -0.000332033, -0.000386053
Attitude Quaternion (w,x,y,z) = 0.407821, -0.0157947, 0.00244076, 0.912922
RTK if available (lat/long/alt/velocity_x/velocity_y/velocity_z/yaw/yaw_info/pos_info) =23.0211,113.234,23.5737,-0.0331256,0.333299,0.640153,22,"2
-------
以上是关于飞行机器人DJI平台OSDK ROS 编译及使用的主要内容,如果未能解决你的问题,请参考以下文章