多视几何:对极几何的代数表示--基本矩阵F
Posted tina_ttl
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了多视几何:对极几何的代数表示--基本矩阵F相关的知识,希望对你有一定的参考价值。
对极几何的基本概念中是对对极几何的基本形式进行了描述,但并没有从数学角度对其进行描述,而基本矩阵正是对对极几何的代数描述
1.总述
对极几何描述的就是点x和它的对极线l’之间的关系: l′=Fx ,其中,矩阵F称为基本矩阵
下面,分别从几何角度和代数角度对上式进行推导
2.几何推导
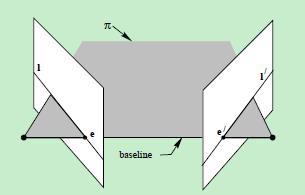
从几何角度推导关于对极几何方程,如下图所示
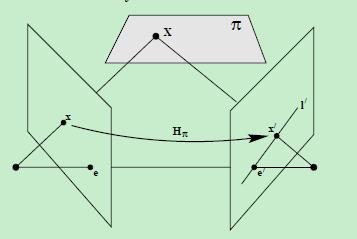
- 图像点x是空间点X在图像1中的投影点,那么,有
x=H1X⇒(1) - 同理,图像点x’是空间点X在图像1中的投影点,那么,有
x′=H2X⇒(2) - 根据式(1)可以得到
X=H−11x⇒(3) 将式(3)代入式(2)得到
x′=H2H−11x→令H2H−11=HπHπx⇒(4)
图像点x对应的基线l’是通过点x’和点e’的直线,那么,有
l′=e′×x′⇒(5)
其中的 × 为叉乘;将式(4)代入式(5)可以得到
l′=e′×Hπx→令e′×Hπ=FFx
结论(来自多视几何教材):基本矩阵F可以记为 F=[e′]×Hπ ,其中, Hπ 是从一幅图像到另一幅图像通过任意平面 π 的转移映射,而且,因为 [e′]× 的秩为2, Hπ 的秩为3,所以, F 的秩为3
3.代数推导
仍旧以下图为例,假设两幅图像对应的摄像机矩阵分别为P和P’,光心分别为C和C’
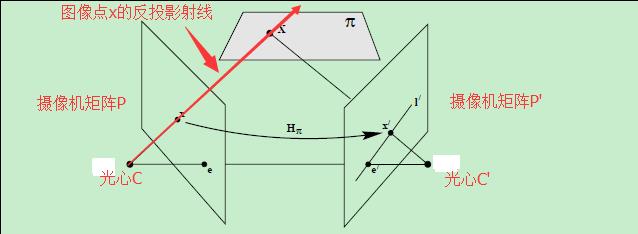
图像点x反投影射线的参数形式为
- λ=0时 ,代表该射线上一个特殊的点 P+x
- λ=+∞时 ,代表该射线上一个特殊的点C
在摄像机2的作用下,这两个特殊的点分别被投影到图像2中的点x’和e’,即
- x′=P′P+x
- e′=P′C
从而,图像1中的点x的对极线即为