2018年总结
Posted 杨铖
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了2018年总结相关的知识,希望对你有一定的参考价值。
2018年就一个难字,事难做,身难练。
一直在等这天,也就是昨天才把手中的一个大项初步解决,才有心情写总结,不然神经一直紧绷着,很艰难。
其实这一年细数下来,零零散散有很多小事,不足挂齿,比较大的事有三件:
一是参与了大数据中心的前期筹建,包括集群等硬件设备的选择,规划,到CDH的部署,相关大数据埋点的撰写 flume+kafka+spark stream+hbase做日志收集 ,以及 kudu+superset 做报表 整个流程下来,收获颇多,当时采用的这种方案的优点是埋点方无需每次新增埋点都通知接收方,只需按照规则存放,接收方会自动识别与增加埋点字段列,同时分开在线与离线,在延迟一个小时的粒度下,实现比较快速的BI报表查询。
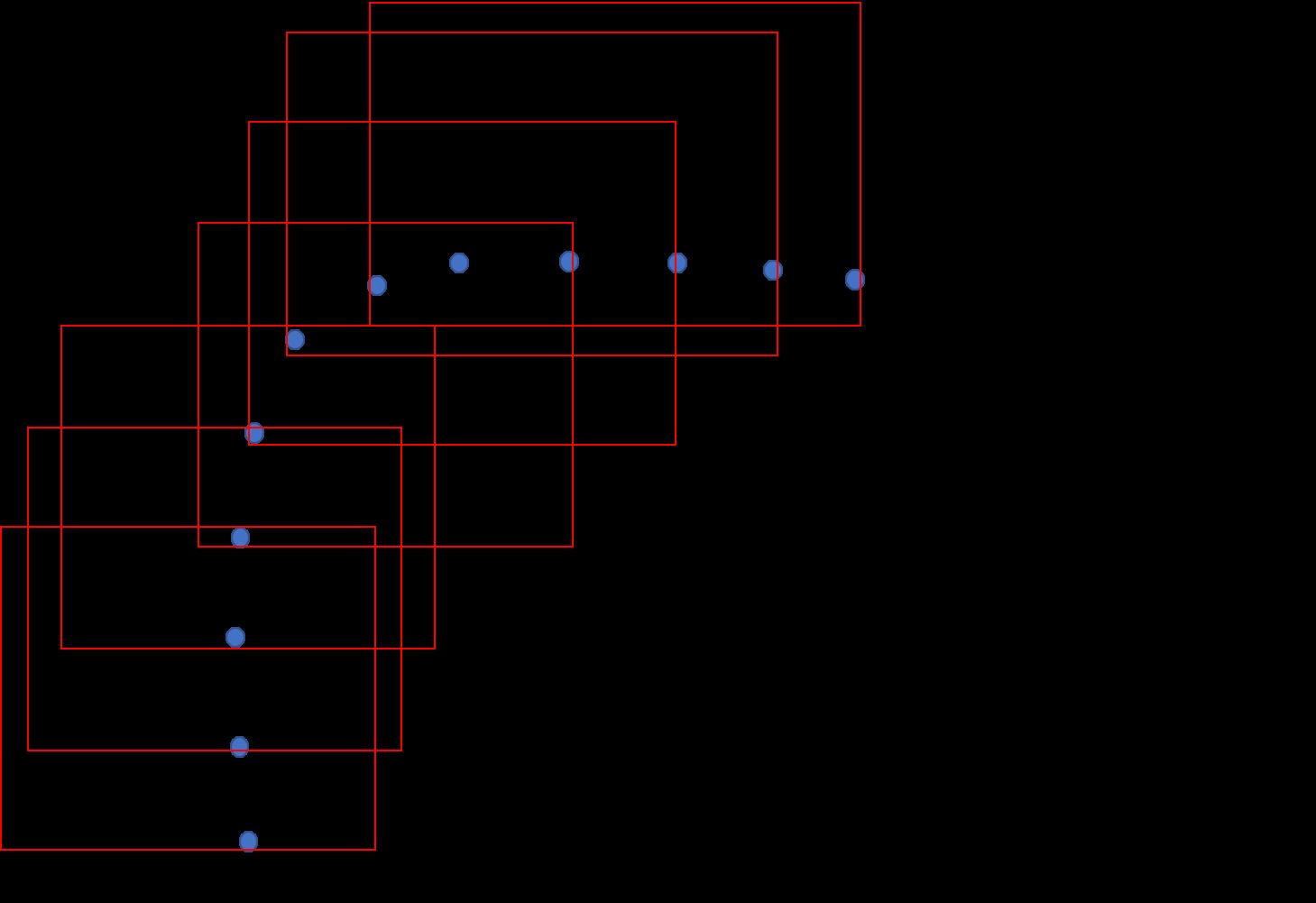
二是导航的非交叉路口识别,这也是一个目前地图应用上的一个基于深度学习图像识别项目,由于不少用户一直反馈我们对这方面导航语言有偏差,所以索性就利用深度学习一改传统规则判断的方法,将非交叉路的转向以及关键点做出,大致如下图,找到该路口的转向以及关键点5:
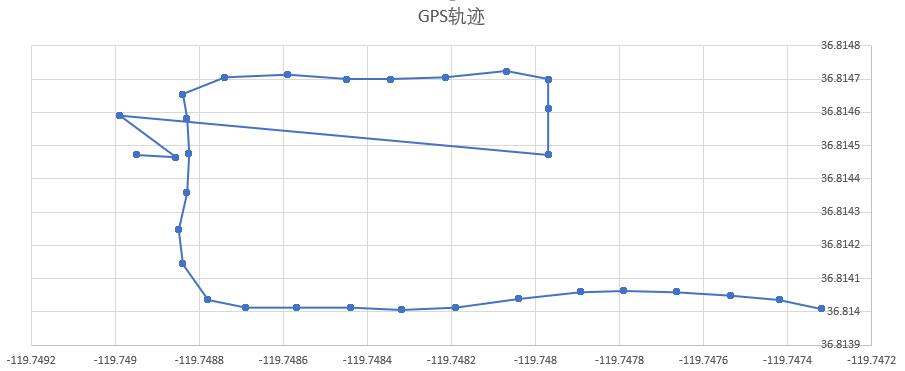
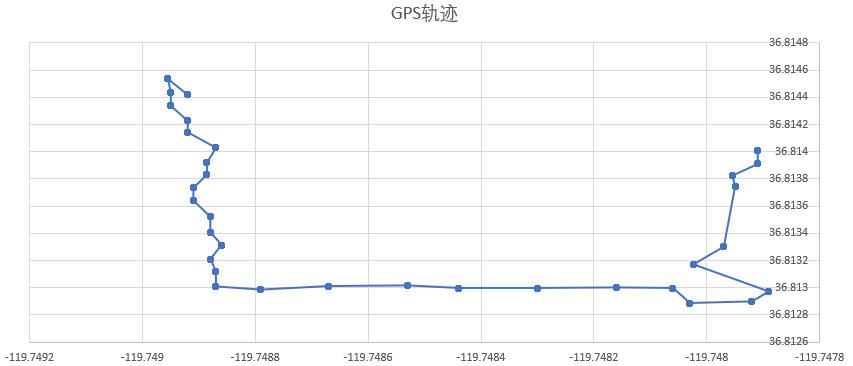
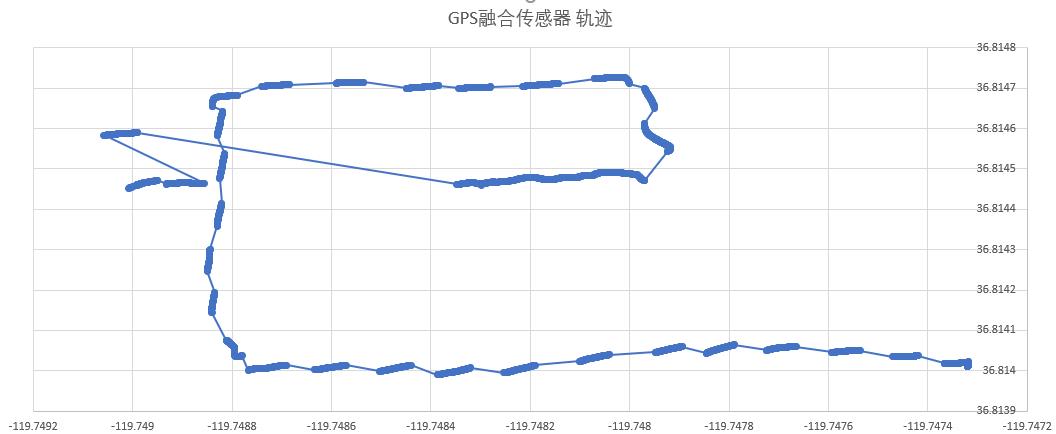
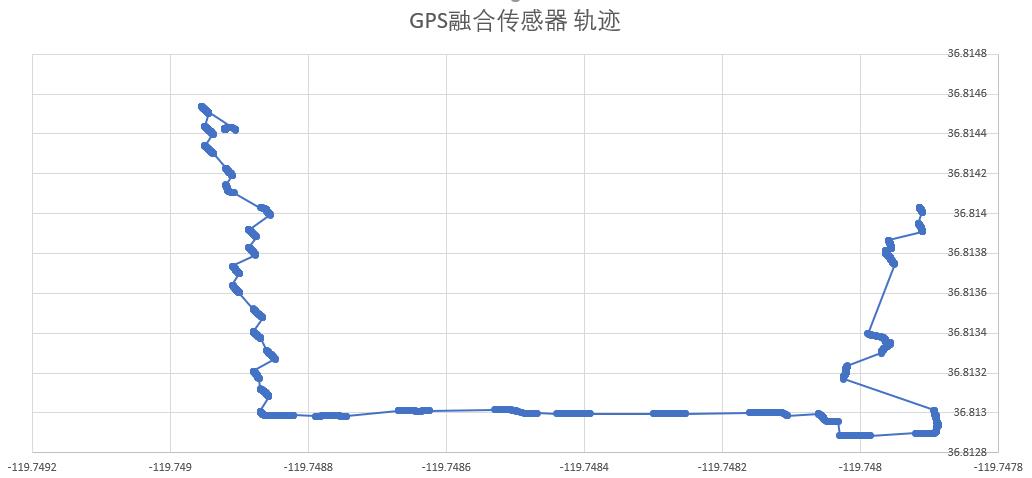
三是融合定位,这是一个跨领域的棘手难题,目前也只是做了第一版,把(加速计,陀螺仪,地磁计,方向传感器,重力感应器)和GPS融合一起,帮助更加准确的导航定位:
今年也同时拿了4个专利,1个年度优秀,1个季度优秀,来年要做的是把《C++ primer》再仔细看一遍,做底层模块的时候,发现自己写的并不是很好,leetcode上的算法题和《算法导论》再继续看下去,同时百度的Apollo,以及OSRM,Valhalla三个开源项目的一些算法细节,也要研究学习下。
上述是工作的,今年三月份也办了健身卡,新手福利期下来体重从62kg到73kg,差不多20斤。。有点可怕。。
为明年立几个flag:
1、融合传感器的定位摸透,Apollo 定位/感知/规划 三大模块看透,OSRM,Valhalla的规划引擎也看透;
2、《SLAM十四讲》《state estimation for robotics》前者再看一遍,后者着重看,《Multiple View Geometry in Computer Vision》抽空大致了解,与前者查漏补缺。
3、letcode 200题算法,把 c++ 搞上一个层次。
4、健身增肌到160斤,150后做有氧,体脂控制到15%~20%。
以上是关于2018年总结的主要内容,如果未能解决你的问题,请参考以下文章