双足轮机器人Ascento技术详解--实验--总结翻译
Posted 灯哥开源
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了双足轮机器人Ascento技术详解--实验--总结翻译相关的知识,希望对你有一定的参考价值。
Ⅴ 实验
A.仿真
所有的控制算法都经过仿真的测试,使用 Gazebo [22]作为物理引擎。从CAD模型导出了具有质量以及惯量值的机器人模型,使得其有一个真实的,可以高效计算测试的环境。仿真和实际实验的相似表明了子章节 Ⅲ-B 的有效性,并且使得在章节 Ⅵ 中今后的发展成为可能。
B.实验结果
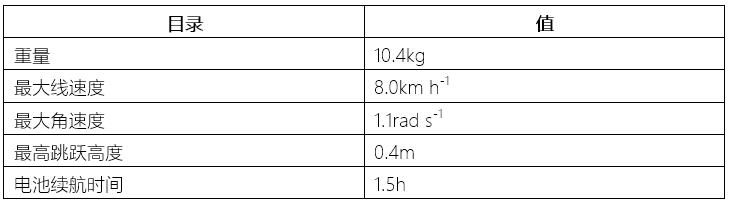
在这个章节,呈现了对于原型系统的一系列实验的结果。在图8以及表Ⅱ中分别说明了机器人的尺寸以及其他的技术规格。进行了多个实验来证明机器人对于稳定表现(Ⅴ-B.1),跳跃(Ⅴ-B.2),以及倒地恢复(Ⅴ-B.3)的具体能力。

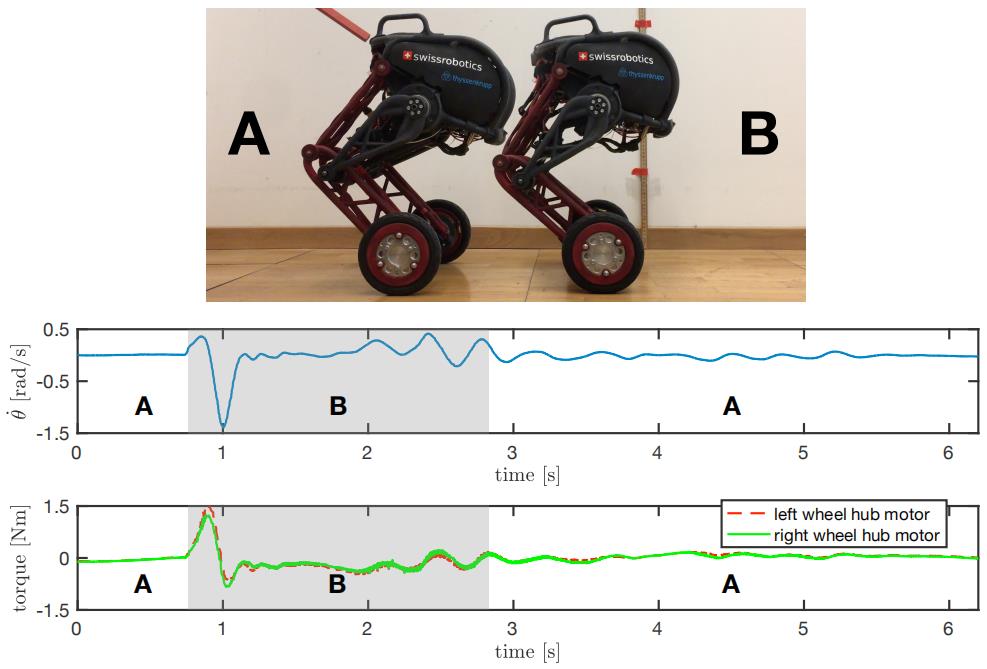
- 稳定性表现: 系统的目标是一直保持直立。在不影响稳定性的情况下,使得系统能够抵抗大量外部干扰。机器人受到木棍打击的反应显示在图9中。除了冲击干扰,系统也能够在永久或者持续时间较长的干扰(拉、推或者增加重量)下回到它的平衡位姿。
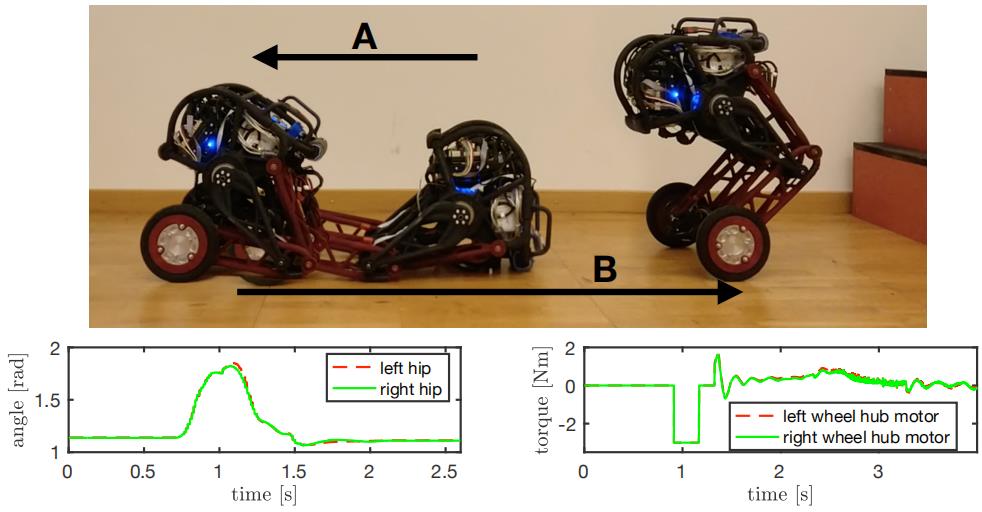
- 跳跃: 系统能够跳上一个10厘米高的小台阶,如图10所示。机器人在台阶的前后都需要至少90cm来加速至目标速度以及安全着陆。

- 倒地恢复: 从所有可恢复的静止位姿站立需要小于2m的空间。在图11中展示了从躺下位姿站立的过程。
Ⅵ 实验性功能
除了在实际原型上测试的功能,系统还有一些实验性的功能,到目前为止,仅在仿真环境中得到证实。开发了一个探测算法,它可以依靠局部以及全局规划策略,对于一个先前未知的环境进行建图。使用这种地图占位算法,机器人就能够找到并沿着一个无碰撞的路径,从它当前的位置到达任意一个期望的终点[23]-[24]。此外,引入了一个力补偿的倾斜模式,使得系统能够更快地转向而不会导致侧翻。这是通过独立地改变每条腿的角度来使得机器人向内倾斜β角度。这个系统的独特的设计以及模块化的设定将会激发今后学术研究的兴趣,比如说,开发新的控制策略,如使用一条腿进行平衡[25]或者模型预测控制(MPC)。
Ⅶ 总结
本文介绍了Ascento平台,一个两轮平衡机器人能够在平坦地面上快速地行驶,并且通过跳跃来越过障碍物。这个系统的拓扑优化,3D打印的机械设计结构被证明既轻量又有较强的冲击抵抗力。此外,基于模型的鲁棒LQR控制器已在原型系统上成功实现。在对原型系统的多个实验中,展示了其自主跳跃上台阶以及从不同跌倒位姿恢复的能力。最后,机器人的操作环境可以通过结合腿部机器人的地形适应原则[26]从室内拓展到室外。
致 谢
作者希望感谢瑞士苏黎世联邦理工学院以及自动化系统实验室(ASL),瑞士机器人学协会,ANYbotics,Thyssenkrupp,AnewAG,Maxon电机,Wyss Zurich,Conrad,Matrix Vision以及pmdtechnologies的慷慨支持,他们在经济、技术以及精神上提供了支持,没有这些支持,这个项目将不可能被完成。
双足轮开源技术交流QQ群:543613782
参与翻译者:灯哥开源团队,华侨大学华机战队
原文论文: A Two-Wheeled Jumping Robot ——Victor Klemm∗, Alessandro Morra∗, Ciro Salzmann∗, Florian Tschopp, Karen Bodie,Lionel Gulich, Nicola Küng, Dominik Mannhart, Corentin Pfister, Marcus Vierneisel,Florian Weber, Robin Deuber, and Roland Siegwart,2019 ICRA
参 考 文 献
[1] M. Hutter, R. Diethelm, S. Bachmann, P. Fankhauser, C. Gehring, V. Tsounis, A. Lauber, F. Guenther, M. Bjelonic, L. Isler, H. Kolven-bach, K. Meyer, and M. Hoepflinger, “Towards a generic solution for inspection of industrial sites.” ETH Zurich, 2017, 11th Conference on Field and Service Robotics (FSR) 2017.
[2] R. Siegwart and I. R. Nourbakhsh, Autonomous Mobile Robots. The MIT Press Cambridge, Massachusetts, 2004.
[3] M. Kamel, S. Verling, O. Elkhatib, C. Sprecher, P. Wulkop, Z. Taylor, R. Siegwart, and I. Gilitschenski, “Voliro: An omnidirectional hexa-copter with tiltable rotors,” Computing Research Repository (CoRR), vol. abs/1801.04581, 2018.
[4] M. Hutter, C. Gehring, A. Lauber, F. Gunther, C. D. Bellicoso, V. Tsounis, P. Fankhauser, R. Diethelm, S. Bachmann, M. Blösch et al., “Anymal-toward legged robots for harsh environments,” Ad-vanced Robotics, vol. 31, no. 17, pp. 918–931, 2017.
[5] Spotmini. Accessed: 29.07.2018. [Online]. Available: https://www.bostondynamics.com/spot-mini
[6] Atlas. Accessed: 29.07.2018. [Online]. Available: https://www.bostondynamics.com/atlas
[7] Asimo. Accessed: 29.07.2018. [Online]. Available: http://www.asimo.honda.com
[8] R. Armour, K. Paskins, A. Bowyer, J. Vincent, and W. Megill, “Jumping robots: a biomimetic solution to locomotion across rough terrain,” Bioinspiration & biomimetics, vol. 2, no. 3, p. S65, 2007.
[9] Gita. Accessed: 29.07.2018. [Online]. Available: http://www.vespa.com/us_EN/news-promo/Piaggio-Gita.html
[10] Rezero. Accessed: 29.07.2018. [Online]. Available: http://www.rezero.ethz.ch
[11] Garm. Accessed: 29.07.2018. [Online]. Available: https://www.youtube.com/watch?v=Q5PeCkewteo
[12] J. R. Salton, S. Buerger, L. Marron, J. Feddema, G. Fischer, C. Little, B. Spletzer, P. Xavier, A. A. Rizzi, M. P. Murphy et al., “Urban hopper,” vol. 7692. International Society for Optics and Photonics, 2010, p. 76920Z.
[13] Z. Miao, J. Mo, G. Li, Y. Ning, and B. Li, “Wheeled hopping robot with combustion-powered actuator,” International Journal of Advanced Robotic Systems, vol. 15, no. 1, p. 1729881417745608,2018.
[14] G. Song, K. Yin, Y. Zhou, and X. Cheng, “A surveillance robot with hopping capabilities for home security,” IEEE Transactions on Consumer Electronics, vol. 55, no. 4, pp. 2034–2039, November 2009.
[15] Handle. Accessed: 29.07.2018. [Online]. Available: https://www.bostondynamics.com/handle
[16] R. S. Hartenberg and J. Danavit, Kinematic Synthesis of Linkages. New York, San Francisco, Toronto, London: McGraw-Hill Book Company, 1964, algebraic Methods of Synthesis using Displacement Equations.
[17] M. P. Bendsøe, Topology Optimization. Boston, MA: Springer US, 2001, pp. 2636–2638.
[18] L. Gulich, “Gesture Control of a two-wheeled inverted Pendulum,” 2018, Bachelor Thesis, Swiss Federal Institute of Technology, ETH Zurich, 2018.
[19] M. Sayir, J. Dual, S. Kaufmann, and E. Mazza, Ingenieurmechanik 1, Grundlagen und Statik. Springer Fachmedien Wiesbaden, 2015.
[20] Z. Li, C. Yang, and L. Fan, Advanced Control of Wheeled Inverted Pendulum Systems. Springer Publishing Company, Incorporated, 2012.
[21] C. Salzmann and F. Weber, “Fall Recovery and Controlled Resting Position of a Two-Wheeled Robot,” 2018, Bachelor Thesis, Swiss Federal Institute of Technology, ETH Zurich, 2018.
[22] N. Koenig and A. Howard, “Design and use paradigms for gazebo, an open-source multi-robot simulator,” in 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (IEEE Cat. No.04CH37566), vol. 3, Sept 2004, pp. 2149–2154 vol.3.
[23] A. Morra, “Autonomous Single Floor Exploration by a Two-Wheeled Robot with a Local and Global Planner Approach,” 2018, Bachelor Thesis, Swiss Federal Institute of Technology, ETH Zurich, 2018.
[24] N. Küng, “Path Planning and Following of a Non-Holonomic Robot in a Given Map,” 2018, Bachelor Thesis, Swiss Federal Institute of Technology, ETH Zurich, 2018.
[25] C. Pfister, “One-Legged Stabilization Controller Design of a Two- Legged Inverted Pendulum Robot,” 2018, Bachelor Thesis, Swiss Federal Institute of Technology, ETH Zurich, 2018.
[26] C. Gehring, S. Coros, M. Hutler, C. D. Bellicoso, H. Heijnen, R. Diethelm, M. Bloesch, P. Fankhauser, J. Hwangbo, M. Hoepflinger et al., “Practice makes perfect: An optimization-based approach to controlling agile motions for a quadruped robot,” IEEE Robotics & Automation Magazine, vol. 23, no. 1, pp. 34–43, 2016.
以上是关于双足轮机器人Ascento技术详解--实验--总结翻译的主要内容,如果未能解决你的问题,请参考以下文章