感知机模型与应用
Posted Eric%258436
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了感知机模型与应用相关的知识,希望对你有一定的参考价值。
** 如有错误,感谢指正**
如有错误,感谢指正,请私信博主,有辛苦红包,拜“一字之师”。
请根据目录寻找自己需要的段落
导语:本博客为个人整理数模算法学习记录帖,如有错误,感谢指正。系统学习,欢迎持续关注,后续陆陆续续更新
Java 交流qq群 383245788
序
本文旨在记录个人数模美赛备赛经历。转载请注明出处。
本文所涉及的感知机模型仅为简单介绍和数模用法,且应用范围较小,比较偏门
感知机模型
感知机Pereptron)是二分类的线性分类模型,其输入为实例的特征向量,输出为实例的类别,取+1和1。 感知机对应于输入空间(特征空间)中将实例划为正负两类的分离超平面,属于判别模型。
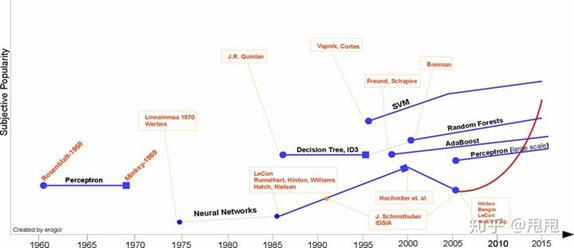
机器学习发展历史
感知机模型生物机制
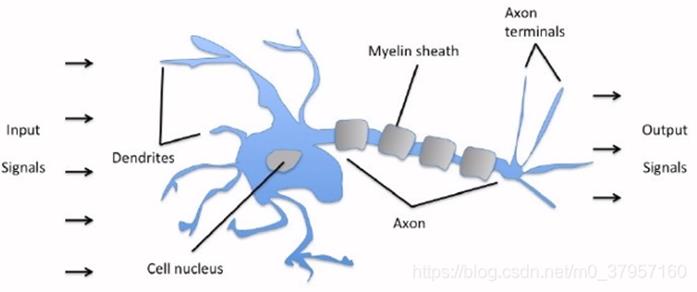
Input:实例的向量,每一列- -个特征
Weight:权重,设置初始值,并使用梯度下降法进行更新
Bias:偏置,允许分类器左右移动决策边界,有助于更好,更快的训练模型。
Weighted sum:加权求和是Input向量和weight的乘积和
Output:输出为类别,取+1,-1
简单说,感知机模型就是 数据提取特征后,乘权重,求和利用梯度下降,训练,加偏置辅佐分类,最后二分。
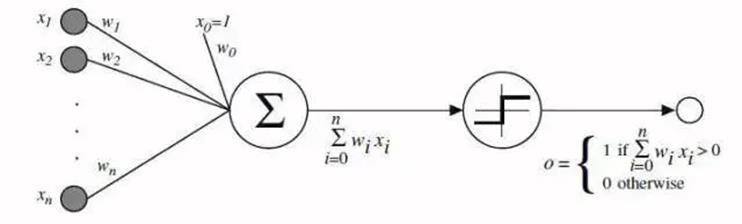
感知机模型的数学模型
给定训练数据集:
T= (x1,y1) ,(x2,)2)…(x.n,yn)
其中xi∈Rn, yi ∈+1-1,i=1,2,.,.n,
输入x表示实例的特征向量,对应输入空间的点,输出的y代表样本的类别。.
则感知机模型为:
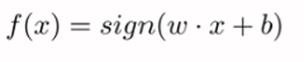
符号函数为:
几何解释
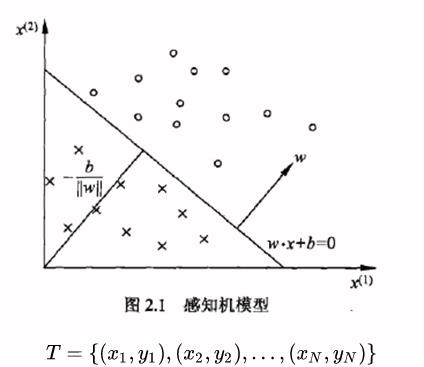
线性方程:wx+b=0
对应超平面S,w为法向量,b截距,分离正负类
仅可以解决二分,如果区别不明显或者交叉,很难求解。典型的错误驱动算法。
模型求解
输入:训练数据集T=(x1,y1),(x2,)2)…(xn,yn)
其中xi∈R, yi∈-1,+1, i=12…N
学习率η (0<n<=1) ;
输出: w,b
感知机模型: f(x)=sign(wx+b)
(1)选择初始值w0,b0
(2)在训练集中选取数据(xi,yi)
(3)如果yi(w*xi+b)<=0
(4)求偏导,更新参数
(5)重复(2)直到训练集中没有误分类点
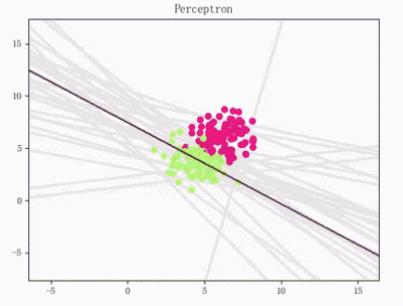
可分
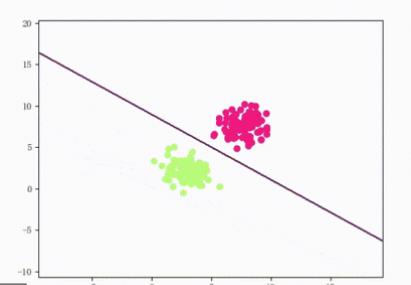
难分
matlab代码
function [W,b] = perceptron(X,y,Maxstep)
%感知机学习算法
%W为待求的权重向量,b为偏差
%X为输入空间,本次取二维的,y为输出空间,取值为[-1,1]
[n,m] = size(X);%求解矩阵X的大小
%给权值和偏差赋初始值,指定学习步长
W = zeros(m, 1);%W为m行的列向量
b=0;%设置偏差的初始值为0
mu= 0.5;%将学习步长设置为0.5,0<mu<=1
for step = 1:Maxstep%迭代更新参数值
miss_flag=true;%设置一个标志位用来判断是否存在误分类点
fori=1:n%
if (i)*(X(;)*W+b))< =0%判断随机选择的点是否是误分类点
miss_ flag = false;%若随机选择的点是误分类点,则将标志位设置为false
%根据梯度下降法更新权重和偏差参数
W = W + mu*y(i)*X(i;);
b= b + mu*y(i); .
end
end
if miss_ flag == true%如果标志位为true,表示误分类点数为0,算法已经实现正确分类,不需要继续迭代更新了,跳出循坏
break
end
end
clc
%指定输入空间
X = [3,3;4,3;1,1];
%指定输出空间
y=[1,1,-1];
n = size(y,2);%求解y的列长度
%绘制出特征空间中的实例点
forj = 1:n
if y(j) == 1%绘制正实例点
plot(X(,1),X(j,2),r*);
end
if y(j) == -1%绘制负实例点
plot(XGj,1),X(j,2),b*);
end
hold on %该语句可以在原图的基础上绘制新的图像,不加则只能看到最后一一个点
end
%调用函数更新参数
[W,b] = perceptron(X,y,2000);
xlabel =linspace(0,5,500);
ylabel = -(W(1)/W(2))*xlabel -b/W(2);%将X(2)看成因变量,X (1)看作自变量,故可以得出算法绘制出的超平面
plot(xlabel,ylabel);
以上是关于感知机模型与应用的主要内容,如果未能解决你的问题,请参考以下文章