DCC2022:高阶帧内预测
Posted Dillon2015
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了DCC2022:高阶帧内预测相关的知识,希望对你有一定的参考价值。
本文来自DCC2022论文《High-order Intra Prediction for Future Video Coding》
帧内预测
帧内预测是去除空域冗余的重要工具,它从上方或左侧重建像素中为当前像素选择参考像素,参考像素的具体位置由像素投影法获得,它通过选择的模式的角度计算投影后的位置,它们通过线性模型实现。对于方向性很强的线性纹理,这种帧内预测方式效果很好,但是对于一些弯曲的纹理结构不能很好的处理。因此论文提出了一种通过二次模型计算参考像素位置的方法。
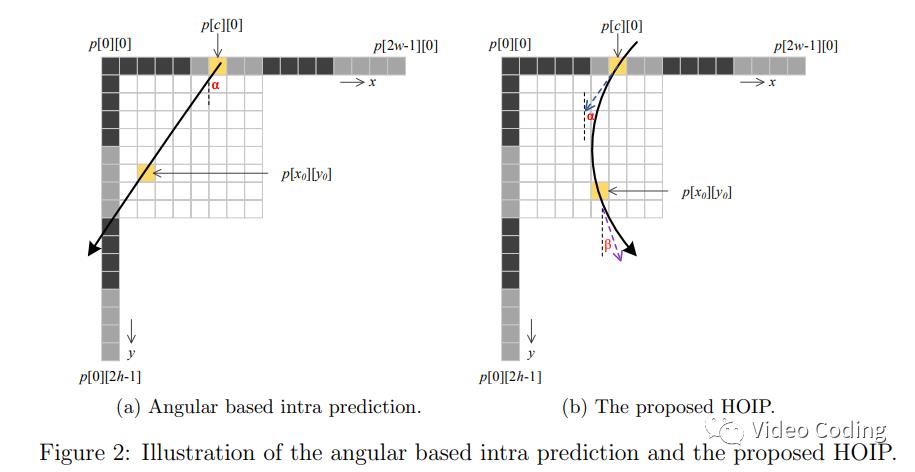
Fig.2(a)是传统的帧内预测方法,Fig.2(b)是论文提出的高阶帧内预测方法(HOIP)。
传统角度帧内预测
传统的角度帧内预测可以分为两类:垂直类和水平类。文中以垂直类为例说明。Fig.2(a)是一个垂直类的角度预测的例子,预测像素  由上方参考像素求得,对应参考像素的坐标(c,0),
由上方参考像素求得,对应参考像素的坐标(c,0),

由当前位置和角度按公式(1)可求得参考像素位置,

然后可以得到参考像素p[c][0]
高阶帧内预测
高阶帧内预测和传统帧内预测原理相似,但是不再直接通过角度方向去取参考像素,其映射方式通过二次函数实现。Fig.2(b)中曲线就是二次函数,通过角度alpha和beta描述,曲线进入CU的切角是tan(alpha),曲线离开CU的切角是tan(beta),

假设x是y的二次函数,可以用公式(3)描述,其导数是公式(4)。导数公式里有两个参数a和b,由于曲线进入CU的切角是tan(alpha),曲线离开CU的切角是tan(beta),所以曲线在y=0时导数是tan(alpha),曲线在y=h时导数是tan(beta),代入公式可以求得参数a和b,

因此最终的二次函数为,

当alpha=beta时公式(7)退化为(1)。
为了方便将三角函数参数化表示,

最终参考像素的位置c如公式(11),
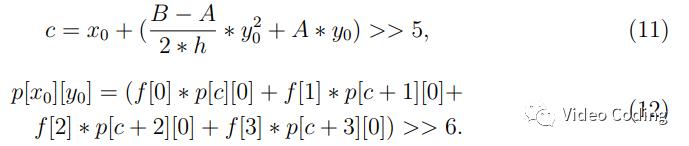
获得参考像素p[c][0]后,通过一个4抽头三次插值滤波器计算预测像素,如公式(12)。
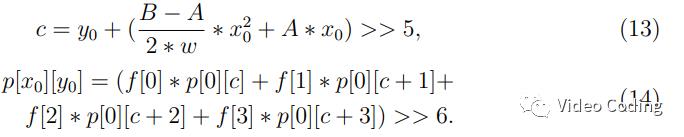
对于水平类模式类似,
为了降低复杂度,在将HOIP集成进编码器时论文提出一些快速算法,具体可参考原文。
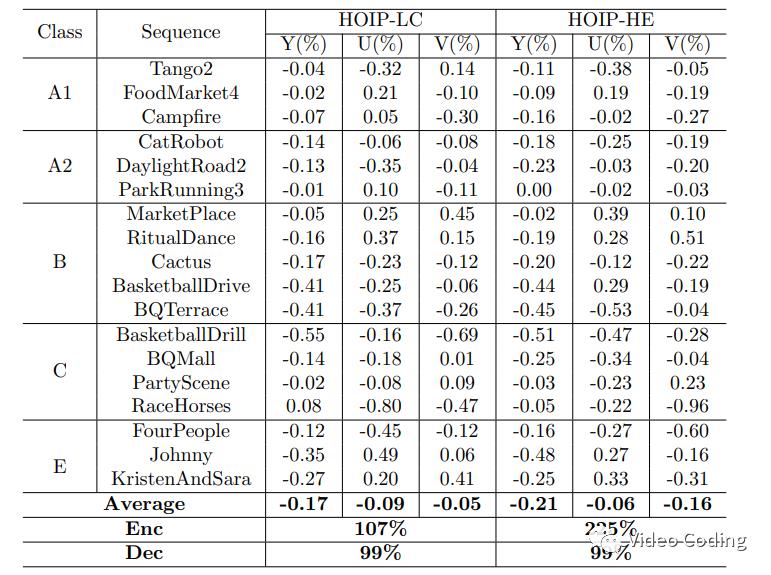
实验结果
实验平台选择VTM10.0,all intra配置,QP=22,27,32,37,
以上是关于DCC2022:高阶帧内预测的主要内容,如果未能解决你的问题,请参考以下文章
Codecs系列HEVC标准:帧内预测技术及x265实现分析