驻极体MIC并联与串联
Posted 卓晴
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了驻极体MIC并联与串联相关的知识,希望对你有一定的参考价值。
对比MIC的串联与并联性能
01 并联与串联
一、背景介绍
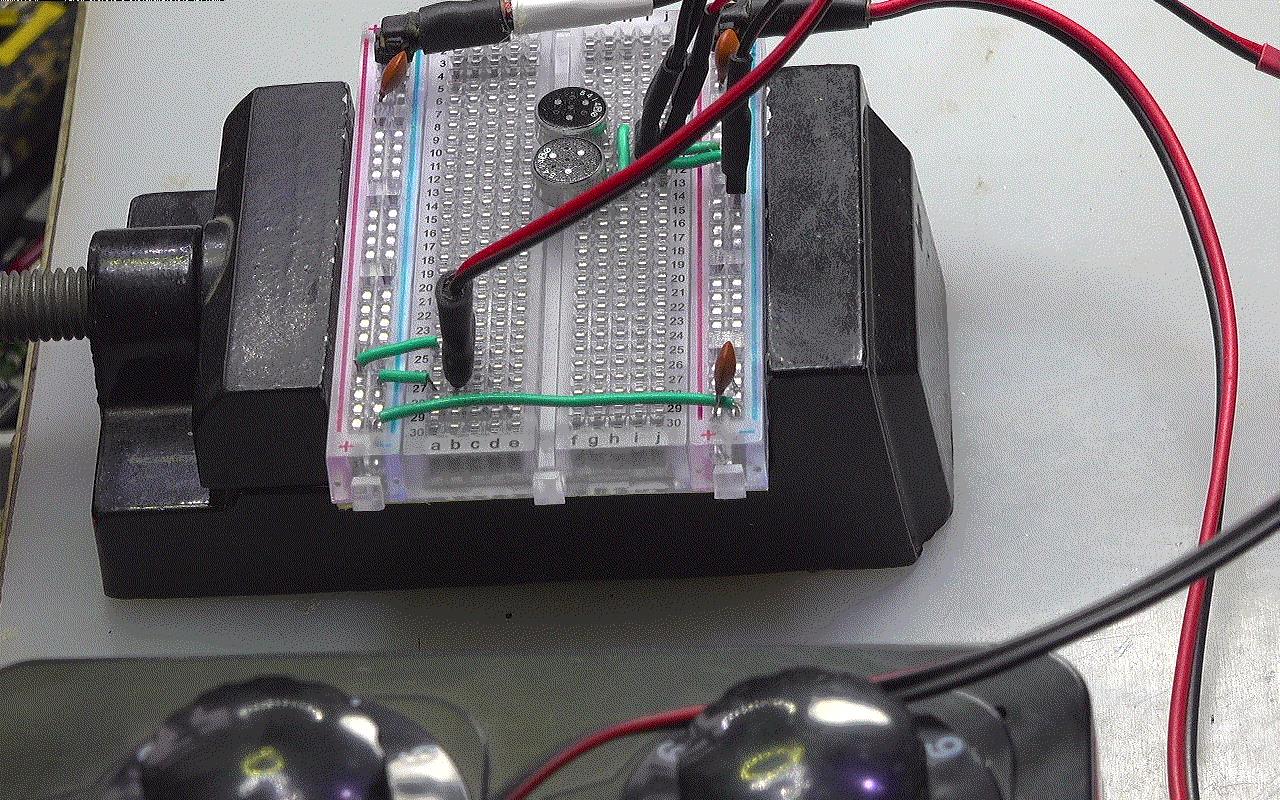
昨天实验讨论了驻极体MIC的并联情况, 有同学提问,是否可以将MIC进行串联? 这样便可以增加输出信号的幅值。 这个话问道了我的心里面。
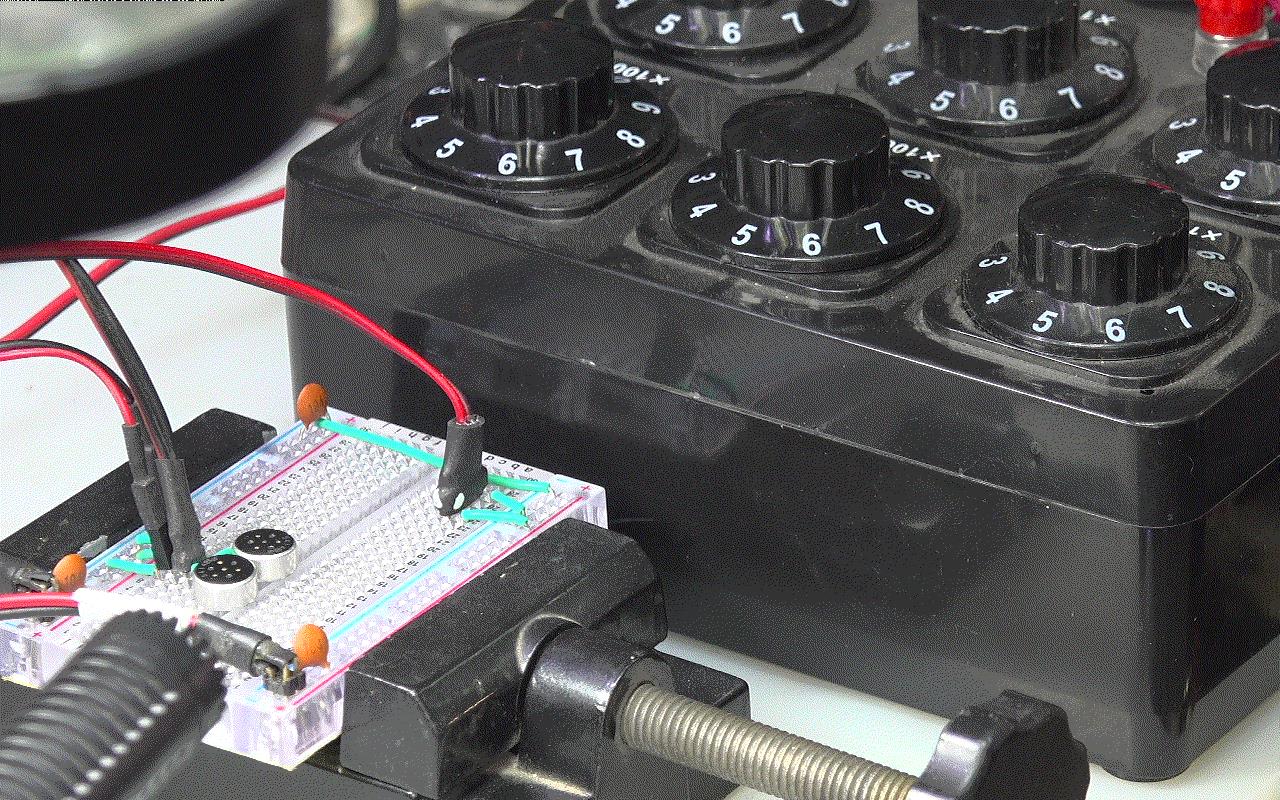
下面对于这个提问测试一下, 分别测量两个MIC在并联和串联状态下, 输出信号的变化。 为了对比,先测量一下两个MIC并联输出信号, 然后在测量他们串联对应的输出信号。
二、测量结果
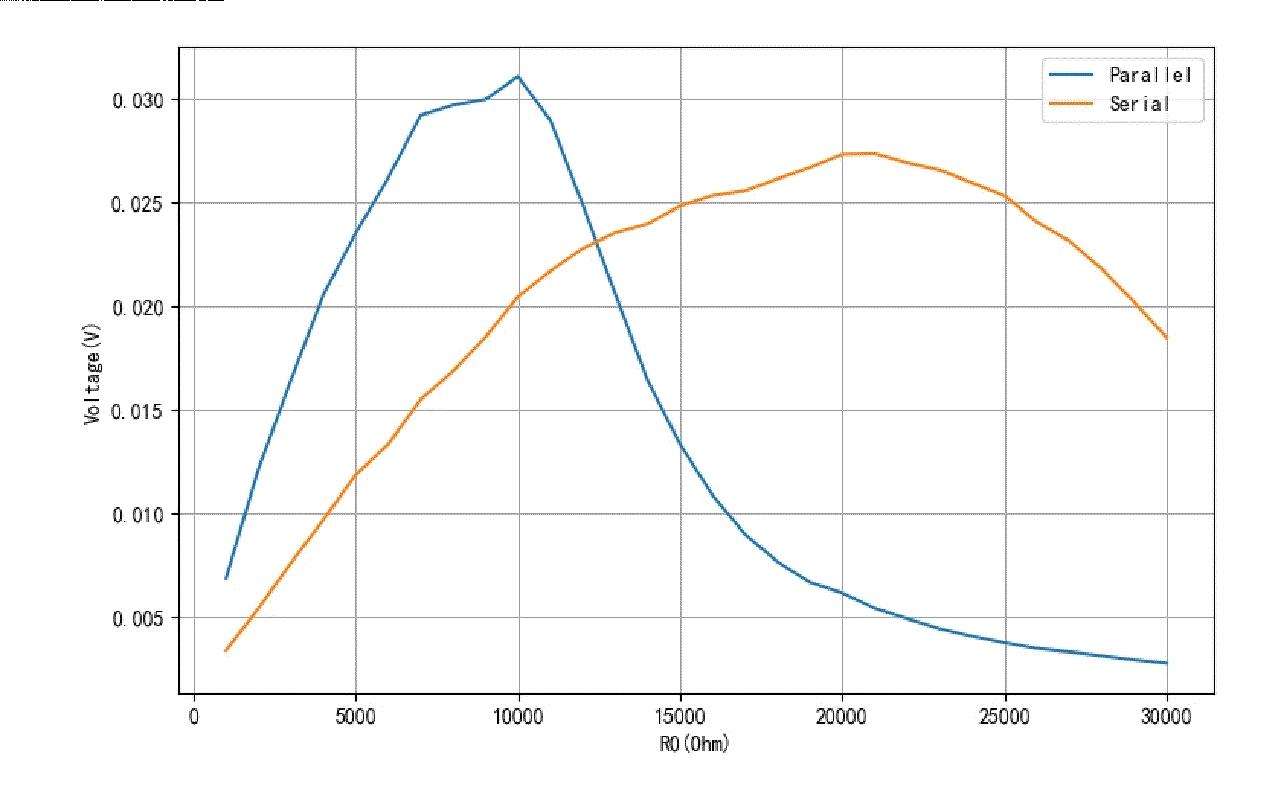
这是测量的结果。 串联与并联对于输出信号大小以及偏置电阻有所不同, 并联的输出值高一些,对应的R0为10k欧姆。 串联输出信号小一些,对应的R0为20k。 这个结果说明了并联能够搞好的提高接收声音的灵敏度。
1、测量数据
(1)数据处理软件
from headm import *
str1 = 2
str2 = 3
str1num = [float(s) for s in tspgetdopstring(str1).split(' ') if s.replace('.','').isdigit()]
str2num = [float(s) for s in tspgetdopstring(str2).split(' ') if s.replace('.','').isdigit()]
rdim = [(i+1) * 1e3 for i in range(len(str1num))]
plt.plot(rdim, str1num, label='Parallel')
plt.plot(rdim, str2num, label='Serial')
plt.xlabel("R0(Ohm)")
plt.ylabel("Voltage(V)")
plt.grid(True)
plt.legend(loc='upper right')
plt.tight_layout()
plt.show()
(2)测量结果
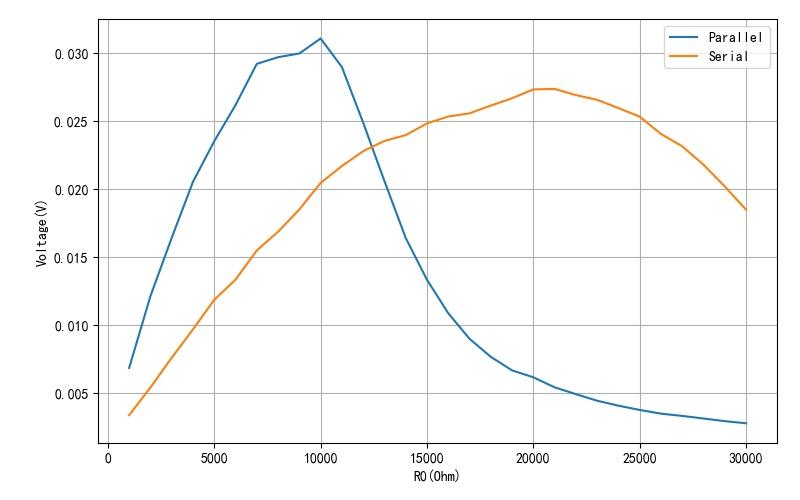
▲ 图1.2.1 R0不同对应的输出信号
0.006847 0.012133 0.016420 0.020543 0.023532 0.026192 0.029222 0.029714 0.029987 0.031089 0.028990 0.024896 0.020598 0.016413 0.013333 0.010872 0.008987 0.007662 0.006663 0.006154 0.005416 0.004914 0.004430 0.004064 0.003750 0.003478 0.003311 0.003121 0.002926 0.002768
0.003370 0.005407 0.007590 0.009683 0.011862 0.013337 0.015492 0.016868 0.018507 0.020459 0.021702 0.022795 0.023550 0.023979 0.024839 0.025349 0.025581 0.026152 0.026695 0.027342 0.027379 0.026926 0.026578 0.025968 0.025340 0.024067 0.023154 0.021802 0.020198 0.018490
※ 总 结 ※
本文测试了驻极体MIC串联与并联接收声音的性能, 可以看到并联的效果更好, MIC灵敏度更高。

● 相关图表链接:
以上是关于驻极体MIC并联与串联的主要内容,如果未能解决你的问题,请参考以下文章