基于SVM与人工神经网络的车牌识别系统
Posted Herbert_Zero
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了基于SVM与人工神经网络的车牌识别系统相关的知识,希望对你有一定的参考价值。
最近研究了支持向量机(Support Vector Machine,SVM)和人工神经网络(Artifical Neural Network,ANN)等模式识别理论,结合OpenCV的书:《Mastering OpenCV with Practical Computer Vision Projects》,将两种思想运用到车辆的车牌识别算法中。车辆识别结合了多种图像处理技术,如视频监控、图像检测、图像分割和光学字符识别(OCR)等,在道路交通监控中有着重要的作用。以下内容主要包含几个方面:
车牌检测
∙ 图像预处理(图像分割)
∙ SVM分类器(对分割图像的分类)
车牌识别
∙ OCR分割
∙ 特征提取
∙ OCR分类(使用多层感知器Multi-Layer Perceptron,MLP)
一、实验准备
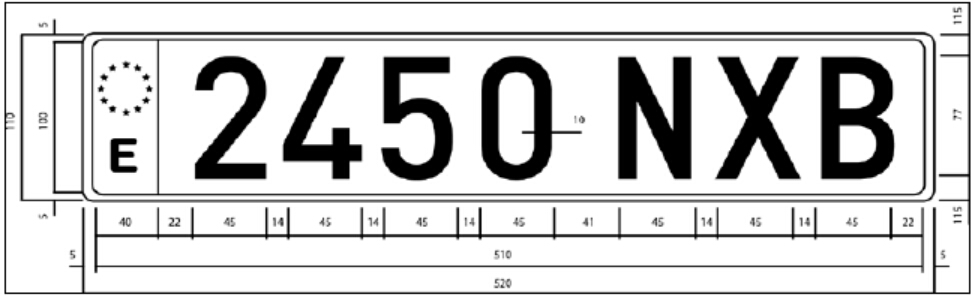
由于图像素材有限,且对于不同国家,车牌的规格与尺寸不尽相同,因此只能选择资料中已有的西班牙车牌进行研究。这里的素材来源于最常见的西班牙车牌(在西班牙,也有多种形状的车牌)。如下图所示,车牌的大小为520mm*110mm,其中左右两组字符由41mm的空间分离,左边包含四个数字,右边包含三个字母,每个字符之间的距离为14mm。所有字符的大小均为45mm*77mm。
参考书籍中给出了一个已经定义好的车牌类Plate,后续的图像处理需要用到,直接使用即可,毕竟研究的重点是后续的处理和模式分类算法:
#ifndef Plate_h
#define Plate_h
#include <string.h>
#include <vector>
#include <opencv/cv.h>
#include <opencv/highgui.h>
#include <opencv/cvaux.h>
using namespace std;
using namespace cv;
class Plate
public:
Plate();
Plate(Mat img, Rect pos);
string str();
Rect position;
Mat plateImg;
vector<char> chars;
vector<Rect> charsPos;
;
#endif#include "Plate.h"
Plate::Plate()
Plate::Plate(Mat img, Rect pos)
plateImg = img;
position = pos;
string Plate::str()
string result = "";
vector<int> orderIndex;
vector<int> xpositions;
for (int i = 0; i< charsPos.size(); i++)
orderIndex.push_back(i);
xpositions.push_back(charsPos[i].x);
float min = xpositions[0];
int minIdx = 0;
for (int i = 0; i< xpositions.size(); i++)
min = xpositions[i];
minIdx = i;
for (int j = i; j<xpositions.size(); j++)
if (xpositions[j]<min)
min = xpositions[j];
minIdx = j;
int aux_i = orderIndex[i];
int aux_min = orderIndex[minIdx];
orderIndex[i] = aux_min;
orderIndex[minIdx] = aux_i;
float aux_xi = xpositions[i];
float aux_xmin = xpositions[minIdx];
xpositions[i] = aux_xmin;
xpositions[minIdx] = aux_xi;
for (int i = 0; i<orderIndex.size(); i++)
result = result + chars[orderIndex[i]];
return result;
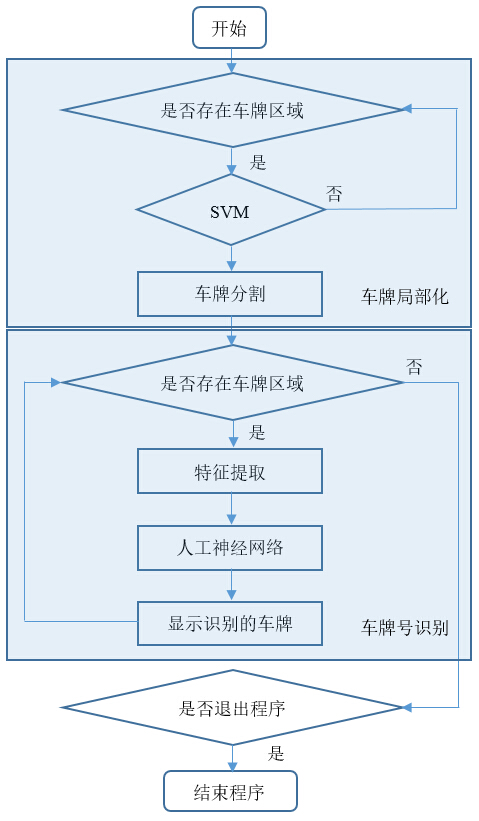
二、算法流程
正如上面叙述的,车牌识别有两个主要步骤,即检测与识别。其中车牌检测的目标是在图像或视频帧中检测到车牌的位置。在完成这一步后,进行识别部分,这里使用OCR算法来识别车牌上的字符,其中有数字,也包含字母。
三、车牌检测
- 图像分割
车牌识别的第一步自然是检测图像或视频帧中的车牌,并去除其他多余的信息,这一部分主要依靠图像分割来完成。而对于图像分割工作主要包含以下步骤:
1.Sobel滤波器;
2.阈值算子;
3.闭形态学算子;
4.一个填充区域掩码;
5.用颜色标记图像中可能检测到的车辆;
6.执行SVM分类器后检测出车牌。
使用边缘检测的原因是一般情况下拍摄到的车牌有大量竖直的边缘,且车牌没有旋转和透视扭曲,通过检测竖直边可以删除图像中多余的区域。在使用Sobel滤波器之前,需要确保图像为灰度图像,否则需要转化;另一个预处理操作是进行适当的高斯滤波,从而消除可能由摄像机或其他环境产生的噪声,这里使用5*5的高斯滤波去噪。
以下是图像分割的源代码,ImageEecognition.h和ImageEecognition.cpp,其中一些主要的函数调用方法已给出,如Sobel函数:
#ifndef ImageEecognition_h
#define ImageEecognition_h
#include <string.h>
#include <vector>
#include "Plate.h"
#include <opencv/cv.h>
#include <opencv/highgui.h>
#include <opencv/cvaux.h>
using namespace std;
using namespace cv;
class ImageRecognition
public:
ImageRecognition();
string filename;
void setFilename(string f);
bool saveRecognition;
bool showSteps;
vector<Plate> run(Mat input);
vector<Plate> segment(Mat input);
bool verifySizes(RotatedRect mr);
Mat histeq(Mat in);
;
#endif
#include "ImageRecognition.h"
void ImageRecognition::setFilename(string name)
filename = name;
ImageRecognition::ImageRecognition()
showSteps = false;
saveRecognition = false;
bool ImageRecognition::verifySizes(RotatedRect ROI)
// 以下设置车牌默认参数,用于识别矩形区域内是否为目标车牌
float error = 0.4;
// 西班牙车牌宽高比: 520 / 110 = 4.7272
float aspect = 4.7272;
// 设定区域面积的最小/最大尺寸,不在此范围内的不被视为车牌
int min = 15 * aspect * 15; // 15个像素
int max = 125 * aspect * 125; // 125个像素
float rmin = aspect - aspect*error;
float rmax = aspect + aspect*error;
int area = ROI.size.height * ROI.size.width;
float r = (float)ROI.size.width / (float)ROI.size.height;
if (r<1)
r = (float)ROI.size.height / (float)ROI.size.width;
// 判断是否符合以上参数
if ((area < min || area > max) || (r < rmin || r > rmax))
return false;
else
return true;
// 对图像进行直方图均衡处理,调整亮度
Mat ImageRecognition::histeq(Mat ima)
Mat imt(ima.size(), ima.type());
// 若输入图像为彩色,需要在HSV空间中做直方图均衡处理
// 再转换回RGB格式
if (ima.channels() == 3)
Mat hsv;
vector<Mat> hsvSplit;
cvtColor(ima, hsv, CV_BGR2HSV);
split(hsv, hsvSplit);
equalizeHist(hsvSplit[2], hsvSplit[2]);
merge(hsvSplit, hsv);
cvtColor(hsv, imt, CV_HSV2BGR);
// 若输入图像为灰度图,直接做直方图均衡处理
else if (ima.channels() == 1)
equalizeHist(ima, imt);
return imt;
// 图像分割函数
vector<Plate> ImageRecognition::segment(Mat input)
vector<Plate> output;
//n图像转换为灰度图
Mat grayImage;
cvtColor(input, grayImage, CV_BGR2GRAY);
blur(grayImage, grayImage, Size(5, 5)); // 对图像进行滤波,去除噪声
// 通常车牌拥有显著的边缘特征,这里使用sobel算子检测边缘
Mat sobelImage;
Sobel(grayImage, // 输入图像
sobelImage, // 输出图像
CV_8U, //输出图像的深度
1, // x方向上的差分阶数
0, // y方向上的差分阶数
3, // 扩展Sobel核的大小,必须是1,3,5或7
1, // 计算导数值时可选的缩放因子,默认值是1
0, // 表示在结果存入目标图之前可选的delta值,默认值为0
BORDER_DEFAULT); // 边界模式,默认值为BORDER_DEFAULT
if (showSteps)
imshow("Sobel", sobelImage);
// 阈值分割得到二值图像,所采用的阈值由Otsu算法得到
Mat thresholdImage;
// 输入一幅8位图像,自动得到优化的阈值
threshold(sobelImage, thresholdImage, 0, 255, CV_THRESH_OTSU + CV_THRESH_BINARY);
if (showSteps)
imshow("Threshold Image", thresholdImage);
// 形态学之闭运算
// 定义一个结构元素structuringElement,维度为17*3
Mat structuringElement = getStructuringElement(MORPH_RECT, Size(17, 3));
// 使用morphologyEx函数得到包含车牌的区域(但不包含车牌号)
morphologyEx(thresholdImage, thresholdImage, CV_MOP_CLOSE, structuringElement);
if (showSteps)
imshow("Close", thresholdImage);
// 找到可能的车牌的轮廓
vector< vector< Point> > contours;
findContours(thresholdImage,
contours, // 检测的轮廓数组,每一个轮廓用一个point类型的vector表示
CV_RETR_EXTERNAL, // 表示只检测外轮廓
CV_CHAIN_APPROX_NONE); // 轮廓的近似办法,这里存储所有的轮廓点
// 对每个轮廓检测和提取最小区域的有界矩形区域
vector<vector<Point> >::iterator itc = contours.begin();
vector<RotatedRect> rects;
// 若没有达到设定的宽高比要求,移去该区域
while (itc != contours.end())
RotatedRect ROI = minAreaRect(Mat(*itc));
if (!verifySizes(ROI))
itc = contours.erase(itc);
else
++itc;
rects.push_back(ROI);
// 在白色的图上画出蓝色的轮廓
cv::Mat result;
input.copyTo(result);
cv::drawContours(result,
contours,
-1, // 所有的轮廓都画出
cv::Scalar(255, 0, 0), // 颜色
1); // 线粗
// 使用漫水填充算法裁剪车牌获取更清晰的轮廓
for (int i = 0; i< rects.size(); i++)
circle(result, rects[i].center, 3, Scalar(0, 255, 0), -1);
// 得到宽度和高度中较小的值,得到车牌的最小尺寸
float minSize = (rects[i].size.width < rects[i].size.height) ? rects[i].size.width : rects[i].size.height;
minSize = minSize - minSize * 0.5;
// 在块中心附近产生若干个随机种子
srand(time(NULL));
// 初始化漫水填充算法的参数
Mat mask;
mask.create(input.rows + 2, input.cols + 2, CV_8UC1);
mask = Scalar::all(0);
// loDiff表示当前观察像素值与其部件邻域像素值或者待加入
// 该部件的种子像素之间的亮度或颜色之负差的最大值
int loDiff = 30;
// upDiff表示当前观察像素值与其部件邻域像素值或者待加入
// 该部件的种子像素之间的亮度或颜色之正差的最大值
int upDiff = 30;
int connectivity = 4; // 用于控制算法的连通性,可取4或者8
int newMaskVal = 255;
int NumSeeds = 10;
Rect ccomp;
// 操作标志符分为几个部分
int flags = connectivity + // 用于控制算法的连通性,可取4或者8
(newMaskVal << 8) +
CV_FLOODFILL_FIXED_RANGE + // 设置该标识符,会考虑当前像素与种子像素之间的差
CV_FLOODFILL_MASK_ONLY; // 函数不会去填充改变原始图像, 而是去填充掩模图像
for (int j = 0; j < NumSeeds; j++)
Point seed;
seed.x = rects[i].center.x + rand() % (int)minSize - (minSize / 2);
seed.y = rects[i].center.y + rand() % (int)minSize - (minSize / 2);
circle(result, seed, 1, Scalar(0, 255, 255), -1);
// 运用填充算法,参数已设置
int area = floodFill(input,
mask,
seed,
Scalar(255, 0, 0),
&ccomp,
Scalar(loDiff, loDiff, loDiff),
Scalar(upDiff, upDiff, upDiff),
flags);
if (showSteps)
imshow("MASK", mask);
// 得到裁剪掩码后,检查其有效尺寸
// 对于每个掩码的白色像素,先得到其位置
// 再使用minAreaRect函数获取最接近的裁剪区域
vector<Point> pointsInterest;
Mat_<uchar>::iterator itMask = mask.begin<uchar>();
Mat_<uchar>::iterator end = mask.end<uchar>();
for (; itMask != end; ++itMask)
if (*itMask == 255)
pointsInterest.push_back(itMask.pos());
RotatedRect minRect = minAreaRect(pointsInterest);
if (verifySizes(minRect))
// 旋转矩形图
Point2f rect_points[4]; minRect.points(rect_points);
for (int j = 0; j < 4; j++)
line(result, rect_points[j], rect_points[(j + 1) % 4], Scalar(0, 0, 255), 1, 8);
// 得到旋转图像区域的矩阵
float r = (float)minRect.size.width / (float)minRect.size.height;
float angle = minRect.angle;
if (r<1)
angle = 90 + angle;
Mat rotmat = getRotationMatrix2D(minRect.center, angle, 1);
// 通过仿射变换旋转输入的图像
Mat img_rotated;
warpAffine(input, img_rotated, rotmat, input.size(), CV_INTER_CUBIC);
// 最后裁剪图像
Size rect_size = minRect.size;
if (r < 1)
swap(rect_size.width, rect_size.height);
Mat img_crop;
getRectSubPix(img_rotated, rect_size, minRect.center, img_crop);
Mat resultResized;
resultResized.create(33, 144, CV_8UC3);
resize(img_crop, resultResized, resultResized.size(), 0, 0, INTER_CUBIC);
// 为了消除光照影响,对裁剪图像使用直方图均衡化处理
Mat grayResult;
cvtColor(resultResized, grayResult, CV_BGR2GRAY);
blur(grayResult, grayResult, Size(3, 3));
grayResult = histeq(grayResult);
if (saveRecognition)
stringstream ss(stringstream::in | stringstream::out);
ss << "tmp/" << filename << "_" << i << ".jpg";
imwrite(ss.str(), grayResult);
output.push_back(Plate(grayResult, minRect.boundingRect()));
if (showSteps)
imshow("Contours", result);
return output;
vector<Plate> ImageRecognition::run(Mat input)
vector<Plate> tmp = segment(input);
// 返回检测结果
return tmp;
- 图像分类
对分割完的图像使用SVM分类,并由代码自动创建正负样本。这里需要了解一下SVM(Support Vector Machine),即支持向量机算法,这是一种有监督学习方法。OpenCV开发SVM算法是基于LibSVM软件包开发的,LibSVM软件包是台湾大学林智仁开发设计的一个简单、易于使用和快速有效的SVM模式识别与回归的软件包。用OpenCV使用SVM算法的大概流程如下:
1)设置训练样本集,一般需要两组数据,一组是数据的类别,一组是数据的向量信息。
2)设置SVM参数。利用CvSVMParams类实现类内的成员变量svm_type表示SVM类型:
CvSVM::C_SVC // C-SVC
CvSVM::NU_SVC // v-SVC
CvSVM::ONE_CLASS // 一类SVM
CvSVM::EPS_SVR // e-SVR
CvSVM::NU_SVR // v-SVR成员变量kernel_type表示核函数的类型:
CvSVM::LINEAR 线性 u'v
CvSVM::POLY 多项式:(r*u'v + coef0)^degree
CvSVM::RBF RBF函数:exp(-r|u-v|^2)
CvSVM::SIGMOID sigmoid函数:tanh(r*u'v + coef0)成员变量degree针对多项式核函数degree的设置,gamma针对多项式/rbf/sigmoid核函数的设置,coef0针对多项式/sigmoid核函数的设置,Cvalue为损失函数,在C-SVC、e-SVR、v-SVR中有效,nu设置v-SVC、一类SVM和v-SVR参数,p为设置e-SVR中损失函数的值,class_weightsC_SVC的权重,term_crit为SVM训练过程的终止条件。其中默认值degree = 0,gamma = 1,coef0 = 0,Cvalue = 1,nu = 0,p = 0,class_weights = 0
3)在分类之前,需要训练分类器。
在这里,使用75张包含车牌的图像(正样本)和35张不包含车牌的大小为144*33像素的图像(对应负样本)。(若要使车牌识别系统具有普适性,需要更多的训练数据,在本实验中这些数据已经够用)。
在得到分割后的车牌和非车牌图像后,我们把二者都执行reshaple(1,1),再存放到trainImage的矩阵中,并修改对应trainLables矩阵的0-1值,然后把trainData改为32为浮点数系,再把trainData和trainLabel直接写进xml文件。
训练SVM的代码如下:
// Main entry code OpenCV
#include <cv.h>
#include <highgui.h>
#include <cvaux.h>
#include <iostream>
#include <vector>
using namespace std;
using namespace cv;
int main ( int argc, char** argv )
cout << "OpenCV Training SVM Automatic Number Plate Recognition\\n";
cout << "\\n";
char* path_Plates;
char* path_NoPlates;
int numPlates;
int numNoPlates;
int imageWidth=144;
int imageHeight=33;
//Check if user specify image to process
if(argc >= 5 )
numPlates= atoi(argv[1]);
numNoPlates= atoi(argv[2]);
path_Plates= argv[3];
path_NoPlates= argv[4];
else
cout << "Usage:\\n" << argv[0] << " <num Plate Files> <num Non Plate Files> <path to plate folder files> <path to non plate files> \\n";
return 0;
Mat classes;//(numPlates+numNoPlates, 1, CV_32FC1);
Mat trainingData;//(numPlates+numNoPlates, imageWidth*imageHeight, CV_32FC1 );
Mat trainingImages;
vector<int> trainingLabels;
for(int i=0; i< numPlates; i++)
stringstream ss(stringstream::in | stringstream::out);
ss << path_Plates << i << ".jpg";
Mat img=imread(ss.str(), 0);
img= img.reshape(1, 1);
trainingImages.push_back(img);
trainingLabels.push_back(1);
for(int i=0; i< numNoPlates; i++)
stringstream ss(stringstream::in | stringstream::out);
ss << path_NoPlates << i << ".jpg";
Mat img=imread(ss.str(), 0);
img= img.reshape(1, 1);
trainingImages.push_back(img);
trainingLabels.push_back(0);
Mat(trainingImages).copyTo(trainingData);
//trainingData = trainingData.reshape(1,trainingData.rows);
trainingData.convertTo(trainingData, CV_32FC1);
Mat(trainingLabels).copyTo(classes);
FileStorage fs("SVM.xml", FileStorage::WRITE);
fs << "TrainingData" << trainingData;
fs << "classes" << classes;
fs.release();
return 0;
在代码中,调用CvSVM::train函数建立SVM模型,第一个参数为训练数据,第二个参数为分类结果,最后一个参数即CvSVMParams。
4)用这个SVM进行分类。调用函数CvSVM::predict实现分类。
5)获得支持向量
除了分类,也可以得到SVM的支持向量,调用函数CvSVM::get_support_vector_count获得支持向量的个数,CvSVM::get_support_vector获得对应的索引编号的支持向量。
在OpenCV中,SVM函数的调用方法如下:
// 训练SVM,用于训练和测试的图像数据保存在SVM.xml文件中
FileStorage fs;
fs.open("SVM.xml", FileStorage::READ);
Mat SVM_TrainingData;
Mat SVM_Classes;
fs["TrainingData"] >> SVM_TrainingData;
fs["classes"] >> SVM_Classes;
// 设置SVM的基本参数
CvSVMParams SVM_params; // CvSVMParams结构用于定义基本参数
SVM_params.svm_type = CvSVM::C_SVC; // SVM类型
SVM_params.kernel_type = CvSVM::LINEAR; // 不做映射
SVM_params.degree = 0;
SVM_params.gamma = 1;
SVM_params.coef0 = 0;
SVM_params.C = 1;
SVM_params.nu = 0;
SVM_params.p = 0;
SVM_params.term_crit = cvTermCriteria(CV_TERMCRIT_ITER, 1000, 0.01);
// 创建并训练分类器
CvSVM svmClassifier(SVM_TrainingData, SVM_Classes, Mat(), Mat(), SVM_params);更多关于SVM算法的介绍可参照:http://zh.wikipedia.org/wiki/SVM。
取各个图像预处理步骤的结果,如下图所示:
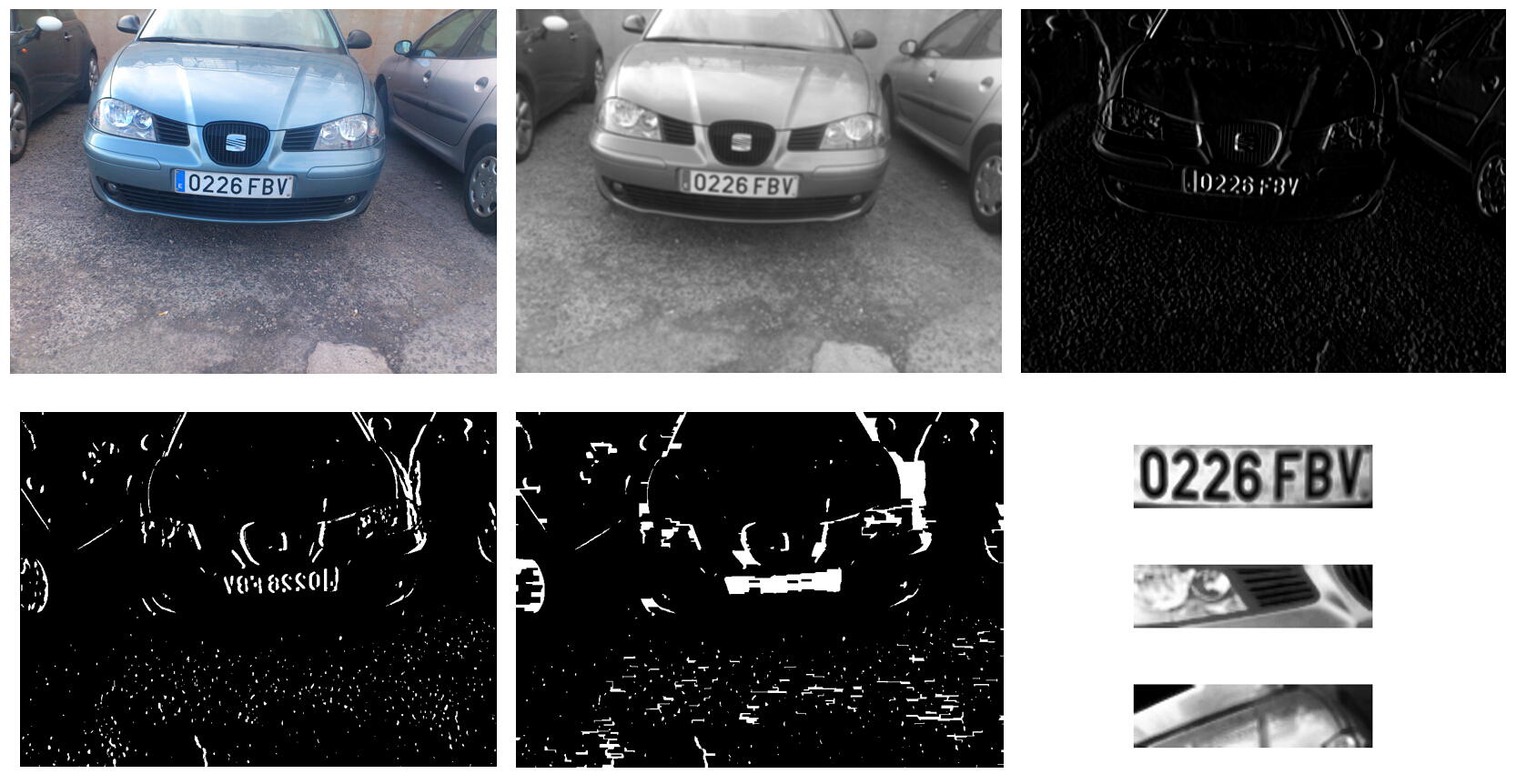
其中图1为原彩色图像;
图2将彩色图像转化为灰度图,并采用5*5模版对图像进行高斯滤波,去除环境噪声;
图3是使用Sobel滤波器求一阶水平方向导数,输出垂直边缘的结果;
图4使用Otsu自适应阈值算法获得图像二值化的阈值,从而得到二值图像;
图5采用闭操作,去除每个垂直边缘线之间的空白空格,并连接所有包含 大量边缘的区域(这步过后,我们将有许多包含车牌的候选区域);
图6显示了执行SVM分类器后得到的正负样本,此时需要对这些正负样本(其实是分割后的图像块)进行分类。
四、车牌识别
车牌识别算法的第二步是使用光学字符识别获取车牌上的字符,而对于车牌号识别工作主要包含以下步骤:
1.ROC分割:对于每个车牌,可以将每个字符分割出来
2.训练人工神经网络(Artificial Neural Network, ANN)
3.使用人工神经网络以识别字符
- ROC分割
分割步骤如下图所示:
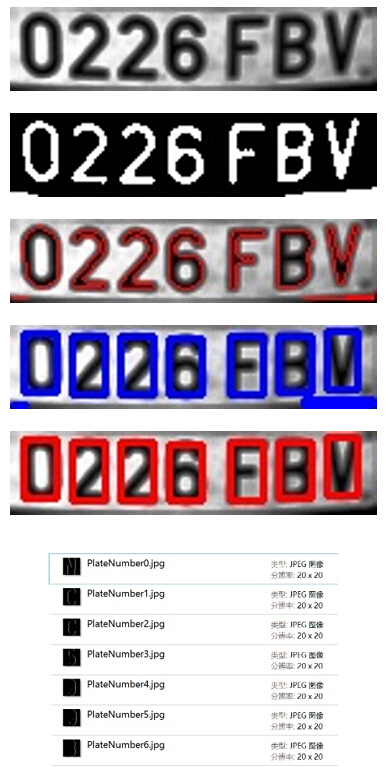
首先,图1为输入分割后的车牌,之后,对图像进行二值化,如图2所示;之后求每个字符的轮廓、最小外接矩形进而求矩形的纵横比及面积。最后统一矩形大小,并将每个字符的图片保存下来。
- 训练人工神经网络
人工神经网络实际是一个多层感知器,是一种前馈人工神经网络模型,其将输入的多个数据集映射到单一的输出的数据集上。对比单层感知器,多层感知器的一大优点是可以轻松实现非线性分类。一个简单的例子是:单个感知器无法解决异或问题,但将多个感知器进行组合可以实现这种较为复杂的空间分割,如下图所示。
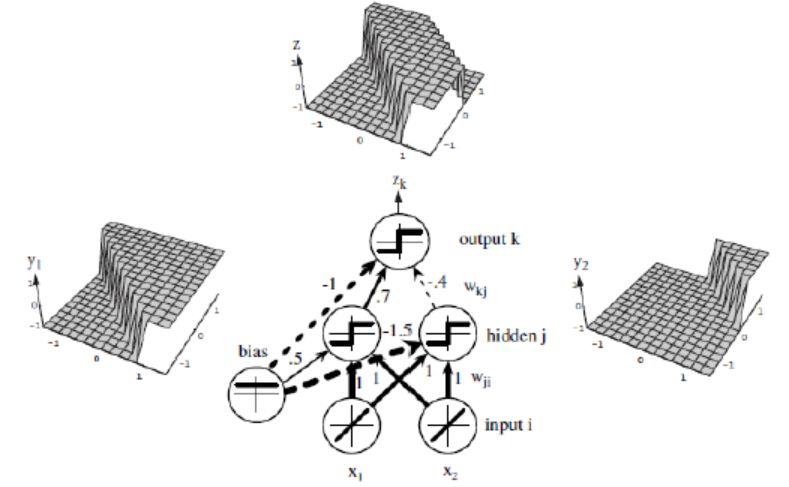
实际上,上述模型就是多层感知器神经网络(Multi-layer perceptron neural networks,MLP neural netwoks)的基础模型。神经网络中每个节点为一个感知器,模型生物神经网络中神经元的基础功能:来自外界(环境或其他细胞)的电信号通过突触传递给神经元,当细胞收到的信号总和超过一定阈值后,细胞被激活,通过轴突向下一个细胞发送电信号,完成对外界信息的加工。

更多关于多层感知器的资料可参考:http://blog.csdn.net/xiaowei_cqu/article/details/9004331
- 使用人工神经网络以识别字符
主要包含以下步骤:
1.读取一张车牌图像
2.设置人工神经网络参数,并使用xml文件训练神经网络
3.提取车牌图像的累计直方图和低分辨率图像特征矩阵
4.将该特征矩阵作为神经网络输入,经过神经网络计算从而得到预测结果
5.按照每个字符图像的相对位置,进行字符重新排序
6.得到最终的字符串并打印出来
车牌识别部分的完整代码如下:
#ifndef OCR_h
#define OCR_h
#include <string.h>
#include <vector>
#include "Plate.h"
#include <opencv/cv.h>
#include <opencv/highgui.h>
#include <opencv/cvaux.h>
#include <opencv/ml.h>
using namespace std;
using namespace cv;
#define HORIZONTAL 1
#define VERTICAL 0
class CharSegment
public:
CharSegment();
CharSegment(Mat i, Rect p);
Mat img;
Rect pos;
;
class OCR
public:
bool DEBUG;
bool saveSegments;
string filename;
static const int numCharacters;
static const char strCharacters[];
OCR(string trainFile);
OCR();
string run(Plate *input);
int charSize;
Mat preprocessChar(Mat in);
int classify(Mat f);
void train(Mat trainData, Mat trainClasses, int nlayers);
int classifyKnn(Mat f);
void trainKnn(Mat trainSamples, Mat trainClasses, int k);
Mat features(Mat input, int size);
private:
bool trained;
vector<CharSegment> segment(Plate input);
Mat Preprocess(Mat in, int newSize);
Mat getVisualHistogram(Mat *hist, int type);
void drawVisualFeatures(Mat character, Mat hhist, Mat vhist, Mat lowData);
Mat ProjectedHistogram(Mat img, int t);
bool verifySizes(Mat r);
CvANN_MLP ann;
CvKNearest knnClassifier;
int K;
;
#endif
#include "OCR.h"
const char OCR::strCharacters[] = '0', '1', '2', '3', '4', '5', '6', '7', '8', '9', 'B', 'C', 'D', 'F', 'G', 'H', 'J', 'K', 'L', 'M', 'N', 'P', 'R', 'S', 'T', 'V', 'W', 'X', 'Y', 'Z' ;
const int OCR::numCharacters = 30;
CharSegment::CharSegment()
CharSegment::CharSegment(Mat i, Rect p)
img = i;
pos = p;
OCR::OCR()
DEBUG = false;
trained = false;
saveSegments = false;
charSize = 20;
OCR::OCR(string trainFile)
DEBUG = false;
trained = false;
saveSegments = false;
charSize = 20;
// 读取OCR.xml文件
FileStorage fs;
fs.open("OCR.xml", FileStorage::READ);
Mat TrainingData;
Mat Classes;
fs["TrainingDataF15"] >> TrainingData;
fs["classes"] >> Classes;
train(TrainingData, Classes, 10);
Mat OCR::preprocessChar(Mat in)
//Remap image
int h = in.rows;
int w = in.cols;
Mat transformMat = Mat::eye(2, 3, CV_32F);
int m = max(w, h);
transformMat.at<float>(0, 2) = m / 2 - w / 2;
transformMat.at<float>(1, 2) = m / 2 - h / 2;
Mat warpImage(m, m, in.type());
warpAffine(in, warpImage, transformMat, warpImage.size(), INTER_LINEAR, BORDER_CONSTANT, Scalar(0));
Mat out;
resize(warpImage, out, Size(charSize, charSize));
return out;
bool OCR::verifySizes(Mat r)
// 正确的车牌字符宽高比为45/77
float aspect = 45.0f / 77.0f;
float charAspect = (float)r.cols / (float)r.rows;
float error = 0.35; // 允许误差达到35%
float minHeight = 15;
float maxHeight = 28;
// 最小比例
float minAspect = 0.2;
float maxAspect = aspect + aspect*error;
// 区域像素
float area = countNonZero(r);
// bb区域
float bbArea = r.cols*r.rows;
// 像素占区域的百分比
float percPixels = area / bbArea;
// 若一块区域的比率超过标准比率的80%,则认为该区域为黑色快,而不是一个字符
if (DEBUG)
cout << "Aspect: " << aspect << " [" << minAspect << "," << maxAspect << "] " << "Area " << percPixels << " Char aspect " << charAspect << " Height char " << r.rows << "\\n";
if (percPixels < 0.8 && charAspect > minAspect && charAspect < maxAspect && r.rows >= minHeight && r.rows < maxHeight)
return true;
else
return false;
// 阈值分割
vector<CharSegment> OCR::segment(Plate plate)
Mat input = plate.plateImg;
vector<CharSegment> output;
Mat thresholdImage;
threshold(input, thresholdImage, 60, 255, CV_THRESH_BINARY_INV);
if (DEBUG)
imshow("Threshold plate", thresholdImage);
Mat img_contours;
thresholdImage.copyTo(img_contours);
// 找到可能的车牌的轮廓
vector< vector< Point> > contours;
findContours(thresholdImage,
contours, // 检测的轮廓数组,每一个轮廓用一个point类型的vector表示
CV_RETR_EXTERNAL, // 表示只检测外轮廓
CV_CHAIN_APPROX_NONE); // 轮廓的近似办法,这里存储所有的轮廓点
// 在白色的图上画出蓝色的轮廓
cv::Mat result;
thresholdImage.copyTo(result);
cvtColor(result, result, CV_GRAY2RGB);
cv::drawContours(result, contours,
-1, // 所有的轮廓都画出
cv::Scalar(255, 0, 0), // 颜色
1); // 线粗
// 对每个轮廓检测和提取最小区域的有界矩形区域
vector<vector<Point> >::iterator itc = contours.begin();
char res[20];
int i = 0;
// 若没有达到设定的宽高比要求,移去该区域
while (itc != contours.end())
Rect mr = boundingRect(Mat(*itc));
rectangle(result, mr, Scalar(0, 255, 0));
// 裁剪图像
Mat auxRoi(thresholdImage, mr);
if (verifySizes(auxRoi))
auxRoi = preprocessChar(auxRoi);
output.push_back(CharSegment(auxRoi, mr));
//保存每个字符图片
sprintf(res, "PlateNumber%d.jpg", i);
i++;
imwrite(res, auxRoi);
rectangle(result, mr, Scalar(0, 125, 255));
++itc;
if (DEBUG)
cout << "Num chars: " << output.size() << "\\n";
if (DEBUG)
imshow("SEgmented Chars", result);
return output;
Mat OCR::ProjectedHistogram(Mat img, int t)
int sz = (t) ? img.rows : img.cols;
Mat mhist = Mat::zeros(1, sz, CV_32F);
for (int j = 0; j<sz; j++)
Mat data = (t) ? img.row(j) : img.col(j);
mhist.at<float>(j) = countNonZero(data);
// 归一化直方图
double min, max;
minMaxLoc(mhist, &min, &max);
if (max>0)
mhist.convertTo(mhist, -1, 1.0f / max, 0);
return mhist;
Mat OCR::getVisualHistogram(Mat *hist, int type)
int size = 100;
Mat imHist;
if (type == HORIZONTAL)
imHist.create(Size(size, hist->cols), CV_8UC3);
else
imHist.create(Size(hist->cols, size), CV_8UC3);
imHist = Scalar(55, 55, 55);
for (int i = 0; i<hist->cols; i++)
float value = hist->at<float>(i);
int maxval = (int)(value*size);
Point pt1;
Point pt2, pt3, pt4;
if (type == HORIZONTAL)
pt1.x = pt3.x = 0;
pt2.x = pt4.x = maxval;
pt1.y = pt2.y = i;
pt3.y = pt4.y = i + 1;
line(imHist, pt1, pt2, CV_RGB(220, 220, 220), 1, 8, 0);
line(imHist, pt3, pt4, CV_RGB(34, 34, 34), 1, 8, 0);
pt3.y = pt4.y = i + 2;
line(imHist, pt3, pt4, CV_RGB(44, 44, 44), 1, 8, 0);
pt3.y = pt4.y = i + 3;
line(imHist, pt3, pt4, CV_RGB(50, 50, 50), 1, 8, 0);
else
pt1.x = pt2.x = i;
pt3.x = pt4.x = i + 1;
pt1.y = pt3.y = 100;
pt2.y = pt4.y = 100 - maxval;
line(imHist, pt1, pt2, CV_RGB(220, 220, 220), 1, 8, 0);
line(imHist, pt3, pt4, CV_RGB(34, 34, 34), 1, 8, 0);
pt3.x = pt4.x = i + 2;
line(imHist, pt3, pt4, CV_RGB(44, 44, 44), 1, 8, 0);
pt3.x = pt4.x = i + 3;
line(imHist, pt3, pt4, CV_RGB(50, 50, 50), 1, 8, 0);
return imHist;
void OCR::drawVisualFeatures(Mat character, Mat hhist, Mat vhist, Mat lowData)
Mat img(121, 121, CV_8UC3, Scalar(0, 0, 0));
Mat ch;
Mat ld;
cvtColor(character, ch, CV_GRAY2RGB);
resize(lowData, ld, Size(100, 100), 0, 0, INTER_NEAREST);
cvtColor(ld, ld, CV_GRAY2RGB);
Mat hh = getVisualHistogram(&hhist, HORIZONTAL);
Mat hv = getVisualHistogram(&vhist, VERTICAL);
Mat subImg = img(Rect(0, 101, 20, 20));
ch.copyTo(subImg);
subImg = img(Rect(21, 101, 100, 20));
hh.copyTo(subImg);
subImg = img(Rect(0, 0, 20, 100));
hv.copyTo(subImg);
subImg = img(Rect(21, 0, 100, 100));
ld.copyTo(subImg);
line(img, Point(0, 100), Point(121, 100), Scalar(0, 0, 255));
line(img, Point(20, 0), Point(20, 121), Scalar(0, 0, 255));
imshow("Visual Features", img);
cvWaitKey(0);
// 特征提取
Mat OCR::features(Mat in, int sizeData)
//Histogram features
Mat vhist = ProjectedHistogram(in, VERTICAL);
Mat hhist = ProjectedHistogram(in, HORIZONTAL);
Mat lowData;
resize(in, lowData, Size(sizeData, sizeData));
if (DEBUG)
drawVisualFeatures(in, hhist, vhist, lowData);
int numCols = vhist.cols + hhist.cols + lowData.cols*lowData.cols;
Mat out = Mat::zeros(1, numCols, CV_32F);
int j = 0;
for (int i = 0; i<vhist.cols; i++)
out.at<float>(j) = vhist.at<float>(i);
j++;
for (int i = 0; i<hhist.cols; i++)
out.at<float>(j) = hhist.at<float>(i);
j++;
for (int x = 0; x<lowData.cols; x++)
for (int y = 0; y<lowData.rows; y++)
out.at<float>(j) = (float)lowData.at<unsigned char>(x, y);
j++;
if (DEBUG)
cout << out << "\\n==================================以上是关于基于SVM与人工神经网络的车牌识别系统的主要内容,如果未能解决你的问题,请参考以下文章