ros命令汇聚
Posted loongembedded
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ros命令汇聚相关的知识,希望对你有一定的参考价值。
文章目录
1. 命令链接收集
1.1 ros官网
1.2 ROS命令行工具
1.3 rostopic:ROS话题
2.常用命令记录
2.1 rosnode
- rosnode list:列出活动节点

- rosnode ping:测试到节点的连接状态

- rosnode info:打印节点信息

- rosnode machine:列出指定设备上的节点
我们ros是分布式系统,在不同设备上可以跑不同的节点,通过这条命令可以列出指定设备上的节点。

- rosnode kill :杀死某个节点

- rosnode cleanup:清楚无用节点,比如启动乌龟节点,然后ctrl+c关闭,用rosnode list还能看到,说明滚该节点并没被彻底清除,可以用cleanup清除节点。
2.2 rostopic
rostopic包含rostopic命令行工具,用于显示有关ROS 主题的调试信息,包括发布者,订阅者,发布频率和ROS消息。它还包含一个实验性Python库,用于动态获取有关主题的信息并与之交互。
- rostopic list:直接调用即可,控制台将打印当前运行状态下的主题名称
rostopic list -v : 获取话题详情(比如列出:发布者和订阅者个数…)

- rostopic echo:获取指定话题当前发布的消息

- rostopic pub:可以直接调用命令向订阅者发布消息

- rostopic info:获取话题相关消息

- rostopic hz [话题名称]:显示指定话题的消息数据发布周期
以下示例中,该消息以1hz(1s)的频率被发布。

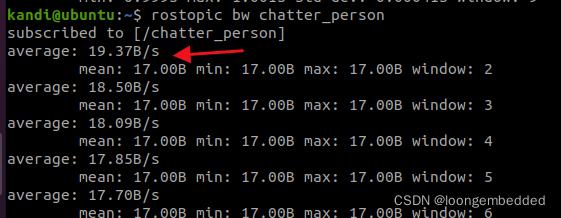
- rostopic bw [话题名称]:显示指定话题的消息数据带宽
下面实例chatter_person话题的数据带宽平均为每秒19B:
2.3 rosservice
rosservice命令用于查看和控制服务相关信息

- rosservice list:列出所有活动的服务

- rosservice call:使用提供的参数调用服务
下面是调用sum_server服务器的服务sum来求和

sum服务的实现如下:

- rosservice info:打印有关服务的信息

- rosservice type:打印服务类型

2.4 rosmsg
rosmsg命令用于查看话题消息(Message)的数据结构的定义

- rosmsg list:会列出当前 ROS 中的所有 msg
结果很多

可以只列出去msg
- rosmsg show:根据获取的消息铭,用rosmsg show查看消息的数据结构
- rosmsg info:和rosmsg show作用相同

- rosmsg md5:显示 md5 加密后的消息

- rosmsg package:显示某个功能包下的所有消息
- rosmsg packages:列出包含消息的功能包

2.5 rosparam
rosparam包含rosparam命令行工具,用于使用YAML编码文件在参数服务器上获取和设置ROS参数

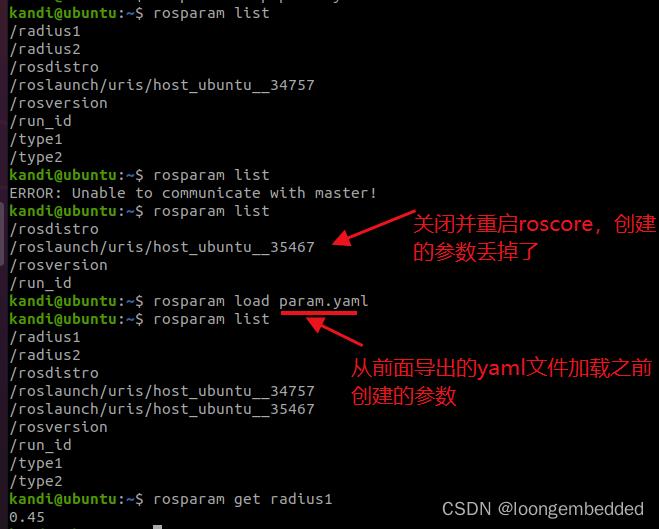
- rosparam list:列出所有参数

- rosparam set:设置参数
- rosparam get:获取参数

- rosparam delete:删除参数

- rosparam dump:将参数写出到外部文件,也就是序列化过程
命令:rosparam dump param.yaml

- rosparam load:从外部文件加载参数
以上是关于ros命令汇聚的主要内容,如果未能解决你的问题,请参考以下文章