曲柄滑块机构运动分析和参数优化
Posted studyer_domi
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了曲柄滑块机构运动分析和参数优化相关的知识,希望对你有一定的参考价值。
1、内容简介
略
465-可以交流、咨询、答疑
2、内容说明
略
数学公式参考了这个文档:曲柄滑块机构运动分析与力学计算 - 百度文库
3、仿真分析
clc
close all
clear
r = 3;
l = 16;
lameda = r/l;
w = 100;
t = 0:0.001:1;
v = w*r*(sin(w*t)+0.5*lameda*sin(2*w*t));
figure
plot(t,v)
xlabel t/s
ylabel 速度/m/s
% 为了计算最大值,由于fmincon是计算最小值,
% 故把数值转为负数,负数最小值求绝对值就是最大值
myfun = @(x)-100*x(1)*(0.5+sqrt(3)/4*x(1)/x(2));
x0 = [3,16]; % 初始值 r和l
A = [2.5 -1;1,-1;1 1]; % 不等式 r和l
b = [0;-10;20]; % A*x <= b
Aeq = [];
beq = []; % Aeq*x = b
lb = [0.5,2.5]; % r和l的下限值
ub = [10,25]; % r和l的上限值
options = optimset('Display','iter'); %显示每次迭代过程
[x, fval] = fmincon(myfun,x0,A,b,Aeq,beq,lb,ub,[],options) %调用最小值计算
% x就是优化的r和l fval就是计算的速度最大值
max_v = abs(fval)
r_opt = x(1);
l_opt = x(2);
lameda_opt = r_opt/l_opt;
v_opt = w*r_opt*(sin(w*t)+0.5*lameda_opt*sin(2*w*t));
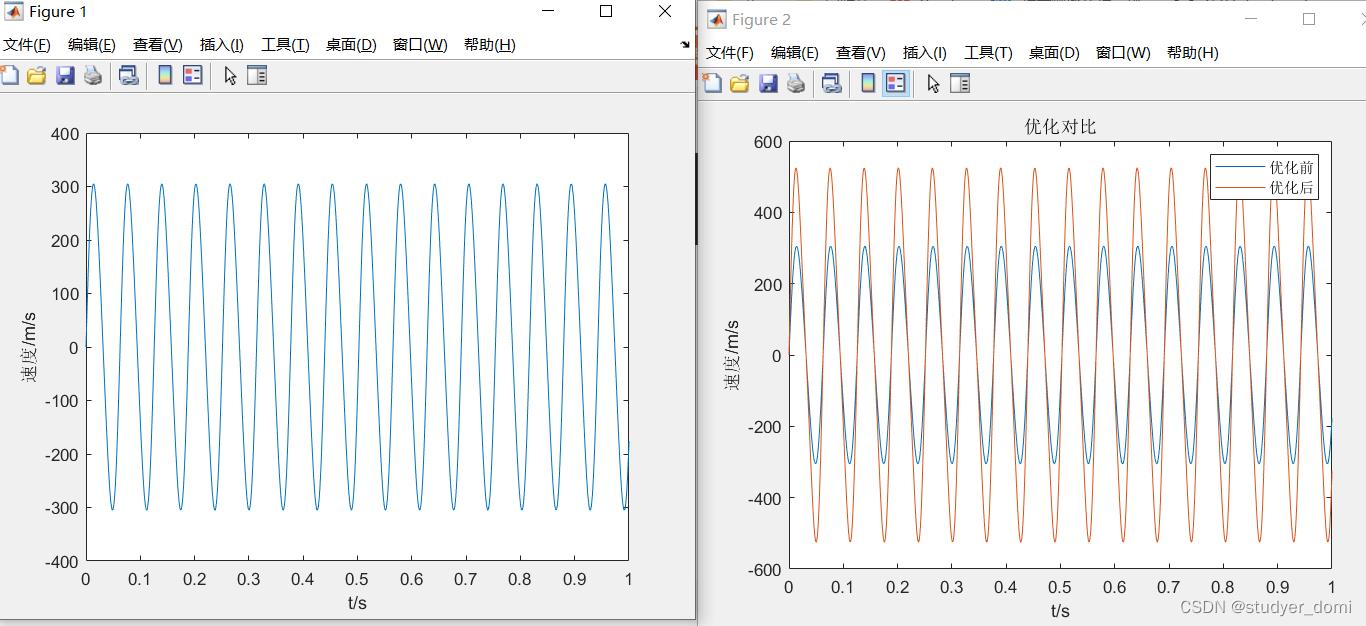
figure
plot(t,v,t,v_opt)
xlabel t/s
ylabel 速度/m/s
title 优化对比
legend('优化前','优化后')

4、参考论文
略
以上是关于曲柄滑块机构运动分析和参数优化的主要内容,如果未能解决你的问题,请参考以下文章