轮毂电机主动减振系统及其垂向性能优化
Posted studyer_domi
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了轮毂电机主动减振系统及其垂向性能优化相关的知识,希望对你有一定的参考价值。
1、内容简介
略
424-可以交流、咨询、答疑
2、内容说明
采用轮毂电机 多轮驱动是电动汽车发展的新方向。它不仅具有 简化传动 系统结构、减轻整 车质量和降低地板高度的优点 ,而且便 于提 高传动效率,实现复杂的底 盘控制。然而,轮毂电机的引入增加 了非簧载质量,不利于电动汽车的行驶平顺性。为此,本文在分析传统集中电机驱动布置 与轮毂电机独立驱动布置两类电动汽车 系统垂向振动的基础上 ,提 出新型的轮毂 电机布置形式与 相应的动力减振机构 ,并以非簧载质量的垂向振动量最小为 目标函数 ,以动力减振机构的弹簧刚度 和阻尼参数为设计变量 ,进行 了优化设计 ,减小了电动汽车行驶过程 中的垂向振动 ,提 高了汽车行 驶平顺性。此方法可为轮毂电机的设计及布置型式提供借鉴。
关 键 词 :轮毂电机 ;电动汽车;动力减振机构
3、仿真分析
clc
clear all
close all
%% ---------基本参数------
% 集中驱动电动车
m1_1=400;%簧上质量
m2_1=50;%簧下质量
Kt_1=237600;%轮胎刚度
Ct_1 = 400;%轮胎阻尼
K_1=26400;%悬架刚度
C_1=2000;%悬架阻尼
% 轮毂电机驱动电动车
m1_2=300;%簧上质量
m3 = 25 ;% 电机质量
m2_2=m2_1+m3;%簧下质量
% 主动吸振车辆
m1_3=450;%簧上质量
m3_1 = 50 ;% 电机质量
Kt_2=207600;%轮胎刚度
Ct_2 = 400;%轮胎阻尼
K_2=22400;%悬架刚度
C_2=2000;%悬架阻尼
K3 = 30000;% m3质量对应的刚度
C3 = 2000;% m3质量对用的阻尼
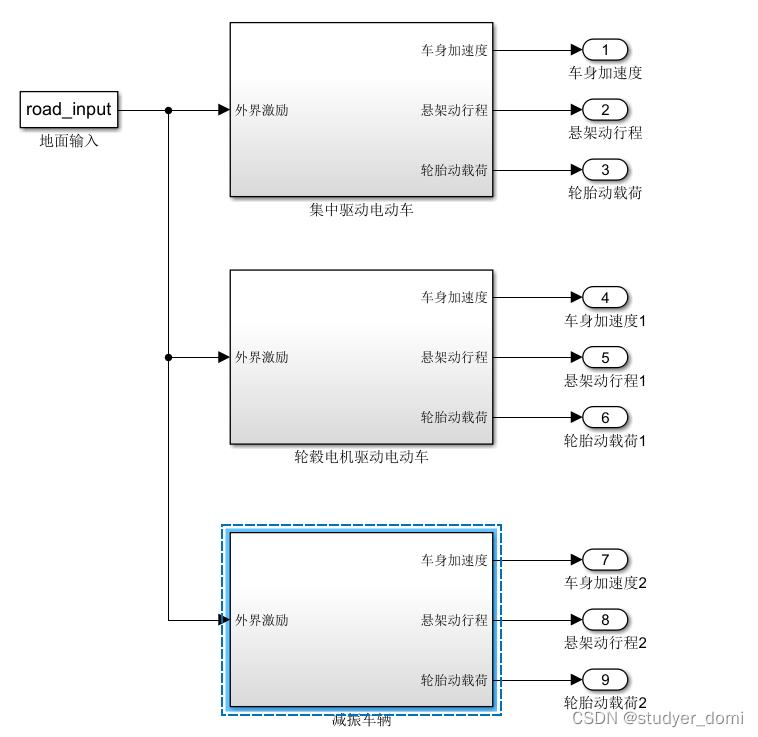
%% 集中驱动、轮边驱动和减振车辆,B机路面激励
% ======= v=10km/h =======================
road_input=road_signal(10);% 路面激励信号
sim model_1.slx
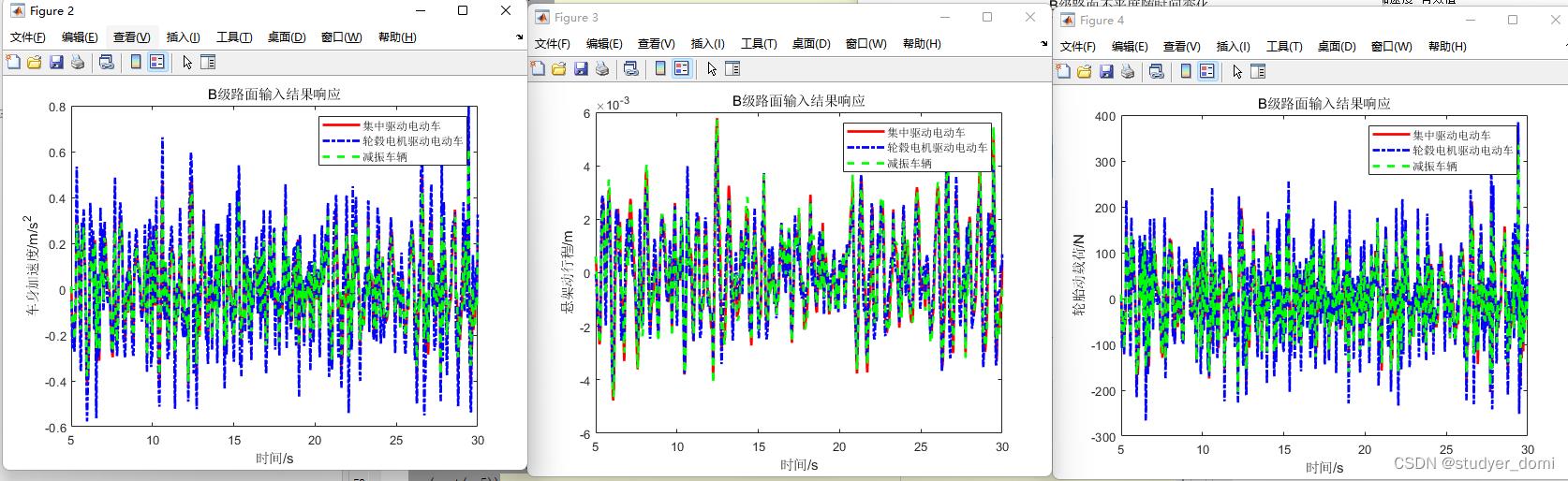
figure
plot(tout,yout(:,1),'r',tout,yout(:,4),'b-.',tout,yout(:,7),'g--','lineWidth',2)
legend('集中驱动电动车','轮毂电机驱动电动车','减振车辆')
xlabel 时间/s
ylabel 车身加速度/m/s^2
title B级路面输入结果响应
set(gcf,'color','w')
xlim([5 30]) % 提取5-30s的仿真结果
figure
plot(tout,yout(:,2),'r',tout,yout(:,5),'b-.',tout,yout(:,8),'g--','lineWidth',2)
legend('集中驱动电动车','轮毂电机驱动电动车','减振车辆')
xlabel 时间/s
ylabel 悬架动行程/m
title B级路面输入结果响应
set(gcf,'color','w')
xlim([5 30]) % 提取5-30s的仿真结果
figure
plot(tout,yout(:,3),'r',tout,yout(:,6),'b-.',tout,yout(:,9),'g--','lineWidth',2)
legend('集中驱动电动车','轮毂电机驱动电动车','减振车辆')
xlabel 时间/s
ylabel 轮胎动载荷/N
title B级路面输入结果响应
set(gcf,'color','w')
xlim([5 30]) % 提取5-30s的仿真结果
disp('轮毂电机驱动电动车 车身加速度 有效值')
rms(yout(:,4))
disp('减振车辆 车身加速度 有效值')
rms(yout(:,7))
disp('轮毂电机驱动电动车 悬架动行程 有效值')
rms(yout(:,5))
disp('减振车辆 悬架动行程 有效值')
rms(yout(:,8))
disp('轮毂电机驱动电动车 轮胎动载荷 有效值')
rms(yout(:,6))
disp('减振车辆 轮胎动载荷 有效值')
rms(yout(:,9))
4、参考论文
轮毂电机独立驱动电动汽车动力减振机构设计与研究.pdf
电动轮减振系统及其垂向性能优化研究_杨俊.caj
以上是关于轮毂电机主动减振系统及其垂向性能优化的主要内容,如果未能解决你的问题,请参考以下文章