无人船文献综述
Posted xiaokcehui
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了无人船文献综述相关的知识,希望对你有一定的参考价值。
智能化一直是船舶发展的趋势。近年来,随着物联网、大数据、云计算、人工智能等新理念、新技术的突飞猛进,船舶自动化水平不断提高,无人船艇的实现有了科技支撑,无人驾驶船舶航行于全球有了实现的可能性。
无人船艇包括具有自主规划、自主航行、自主环境感知能力的全自主型无人船艇,以及非自主航行的遥控型无人船艇和按照内置程序航行并执行任务的半自主型无人船艇。它集船舶设计、人工智能、信息处理、运动控制等专业技术为一体,研究内容涉及自动驾驶、自主避障、规划与导航、模式识别等多方面,可根据其作战或使用功能的不同,采用不同的模块,搭载不同的传感器及设备,执行情报收集、监视侦察、扫雷、反潜、反恐、精确打击、搜寻救助、水文地理勘察、中继通信等任务。
1 无人船发展现状
进入21世纪,随着通信、人工智能等技术的发展,制约无人船艇发展的诸多技术瓶颈得以部分解决,各国加大了无人船艇的研发力度,无人船艇迎来了一段高速发展期。美国海军于2002年起合作开发“斯巴达侦察兵”(Spartan Scout)。

以色列拥有丰富的无人船艇研制技术。由以色列研发的“保护者”(Protector)号无人艇于2003年向以色列国防军交付。

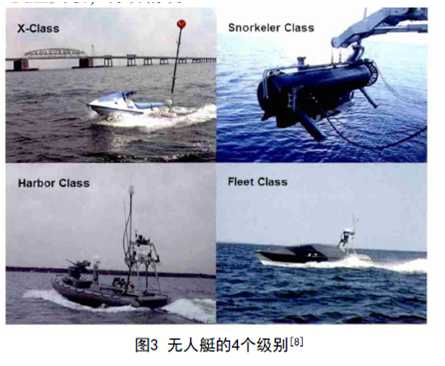
2007年7月美国海军发布了《海军无人水面艇主计划》,明确了无人艇发展的4个级别:X
Class、Harbor Class、Snorkeler Class、Fleet Class,如图3所示。4个级别在长度上依次从小到大,续航力从小到大,模块从非标准级到标准级,任务从低层次到高层次,另外对布放方式和艇型的要求也不相同。
2008年,国内新光公司研发的“天象1号”无人艇在奥帆赛期间作为气象应急装备提供气象保障服务(见图4);云洲智能公司将无人船运用到环境监测领域,进行在线水质污染和核污染监测(见图5)。2013年我国研发的“海巡166号”无人艇(见图6)采用玻璃钢全封闭结构,选用柴油机为动力喷水推进,具有良好的机动性、抗沉性和抗风浪能力。2014年上海大学研制的“精海”系列无人艇(见图7)配备北斗导航系统,可实现自主定位、航迹自主跟踪、航迹线远程动态设定、障碍物自主避碰等技术。

图4 天象一号

图5领航者

图6 海巡166
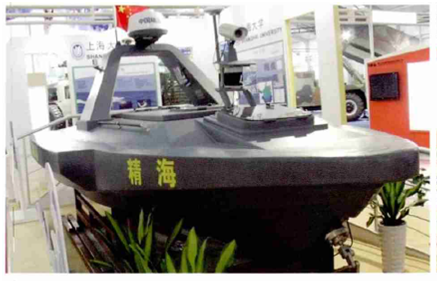
图7 精海
2012年9月,由FraunhoferCML公司、MARINTEK公司、Chalmers大学等8家研究机构共
同合作的“MUNIN”(Maritime Unmanned Navigation through Intelligence in Networks)项目首次以无人散货轮为对象开展大型无人船的研究。拟设计的船舶(见图8)通过雷达、AIS和红外传感器等监测周围环境,与此同时,所有的监控参数都会被实时地传输到陆地控制中心。MUNIN项目实现效果如图8所示。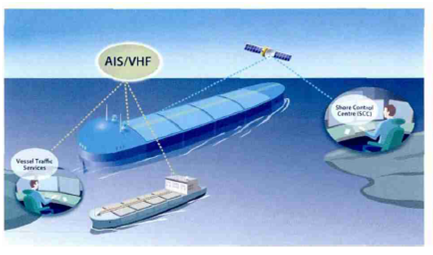
图8 MUNIN
2无人船优势
与传统水面船艇相比,无人船具有如下明显优势:
1. 实现作业无人化、智能化。无人船最显著的特征是航行及任务执行的自主化,为其设定好航行路径及作业任务后,其可自主航行、智能避障和执行任务,不需要或者弱化了人的参与,从而将人从繁重的、强度高的水上任务中解放出来。
2. 作业更高效、更标准。目前,国内成熟无人船船体长度1米-7.5米、速度最高可达到40节。采用这样小船体、高航速、自主航行的无人船,由于其高机动性和高自主性等特点,采用无人船通常可以省却常规船艇的调度、租用、人员维护等环节,利用精准的自主导航和船体小、速度快的特点,可以在多种作业环境中更高效的执行任务。同时,由于作业过程全受计算机控制,可以让作业过程严格按设定执行,任务结果更准确、更标准。
3. 模块化设计,功能多样。无人船通常采取模块化设计,通过更换任务模块使其能够执行不同的使命。因此,搭载不同的任务模块,无人船可以完成从民用到军用的各种任务。
4. 航速高、机动性强。当前各国研制的无人船,多数长度在12米以内,排水量仅数吨至数十吨,吃水深度仅为传统舰艇的几分之一,航速在30至40节,最大航速甚至超过40节,因此能快速驶往传统舰艇无法到达的特定水域,如浅水区、狭窄巷道等。
5. 小巧灵活、隐蔽性好。无人船的外形通常低矮平滑,表面又涂有各种隐身材料,加之体型小巧,可借助海浪、岛礁等的掩护,因此遭毁伤的概率小、生存能力很强。
6. 使用成本低。由于无人船降低了维护人员的成本,不仅可以大量部署,且其活动不受气候影响,可全天候执勤,因此使用成本相对较低。
(二)效能的提升
传统的流域采样、监测环节以及航道测绘领域,租用或使用大型船舶采用人工作业方式采样及监测坐标,或人工定位走线方式进行航道测绘,且因船体大,行动迟缓等因素,导致执行效率或测绘精度较低。以1km2的水库水质采样为例,环境监测部门要进行10个点的水质采样,完成需要约2小时,成熟无人船产品可在30分钟内完成。
(三)平台的兼容性好
无人船平台包含丰富的功能接口和应用软件。可无缝对接多种应用设备和仪器,完成不同应用任务。无人船系统一般由RW、PC基站和远程控制器、推进系统、导航系统、通信系统、电源和水质监测系统组成,船体导航板可搭载GPS接收端、三轴罗盘、三轴加速度计,加上内
置的导航算法,使船可进行精确地路径导航。此外,任务数据可通过无线通信模块传回基站进行运算处理。

图9 无人船系统组成
采用无人船平台,可以搭载常规的单波束声呐、多波束声呐、侧扫声呐、浅层地表剖析仪器、水质监测系统,并可配备常用小目标识别雷达、AIS、气象站、360度全视角云台、夜视摄像头等。为执行海事救助、巡航、海事监管、防污染监测、海上航道测绘等任务提供保障。
(四)水面适应性
无人船平台船体强度及耐腐蚀能力极高,能够适应各种水域。70kg和120kg系列的船体采用双体船设计,航行平稳,抗风浪能力较强,能够适应较恶劣天气。120kg系列相对航速更高、载荷更大、抗风浪能力更强。300kg系列采用先进的三体船形式,具有极高的稳定性,适应十分恶劣的工作环境。
(五)续航能力
70kg系列、120kg系列无人船平台续航能力分别为80km和100km。300kg海洋高速无人船平台系列采用油电混合系统,续航能力在300km以上。
(六)与无人机互补优势
无人驾驶技术是21世纪逐渐被应用的新兴技术。根据美国兰德智库发布无人机和无人船优势对比中,在动力、任务模块、传感能力、通讯能力、隐身性上双方相当。其中无人机在速度和视野上优势明显,无人船在续航和负载能力上优于无人机。
3 关键技术
综合国内外研究现状,目前无人船艇研究涉及关键技术主要有以下几个方面:
1. 航线自动生成与路径规划技术
静态的航线自动生成与路径规划技术大致可分为两类:一类是基于电子海图的航线自动生成与路径规划技术,通过从电子海图中提取水深、障碍物等信息划分可航区域和不可航区域,然后在可航区域中采用智能搜索算法,如Dijkstra算法、A*算法等寻求最短路径,该类算法已有较多研究;但可航区域的最短路径并不一定是实际可行的航线,例如,规划的最短路径可能在IMO推荐航道中逆向行驶。为了解决这一问题,催生了另一类方法——基于轨迹分析的航线自动生成与路径规划技术,该类方法以船舶历史轨迹为基础,通过轨迹压缩、轨迹聚类等提取实际可航路径。除静态航线自动生成与路径规划技术外,还需解决基于动态环境感知的局部航线自动规划问题。
2. 通信技术
无人船艇的通信技术主要涉及无线电通信、光学通信、水声通信3个方面,通信对象主要有无人船艇与母船之间、无人船艇之间,通信的内容主要有母船对无人船艇的指令信息、无人船艇实时回传的运动状态信息以及视频信息等,通信媒介在近距离可依靠甚高频通信,远距离可依靠卫星通信。在无人船艇的通信中重点解决超高频扩频通信与卫星通信信号的海上传输抗衰耗技术、抗多普勒频移技术和抗多种干扰技术问题。
3. 自主决策与避障技术
为降低无人船艇对远程操控人员的依赖,同时扩展多无人船艇协同作战,需要无人船艇具有较高的自主决策和智能避障能力,以确保无人船艇可以独立地执行中长期远程探测、信息搜集等任务。自主决策与避障技术是无人船艇实现高智能化和全自主型的关键一步,目前已有较多科研机构对船舶智能避碰技术进行了广泛而深入的研究,有文献提出一种基于“拟人”策略的船舶智能避碰决策与控制系统,如图所示。
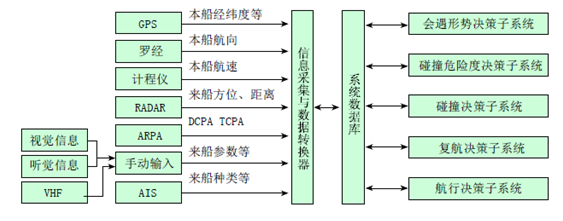
图 船舶智能避碰决策与控制系统
4. 水面物标探测与目标自动识别技术
水面物标探测与目标自动识别技术是实现船舶自主决策与自动避障技术的重要基础。由于无人船艇形体较小,受波浪等因素影响较大,六自由度运动较为剧烈,因此水面物标探测与目标自动识别技术首先要解决视频稳像问题和图像质量增强与平滑问题,其次要解决适应水天线和水岸线条件的水界线检测技术、低信噪比和动态背景条件下的目标检测技术以及基于多源数据关联和融合的水面目标跟踪技术。有文献提出了一种基于光视觉的水面图像处理技术,并将经典的跟踪方法Mean-Shift搜索模型和Kalman滤波预测模型用于水面图像中目标位置信息跟踪,融合两者自身的优势,改善了跟踪速度,降低了目标尺度变化的影响。
4下一步的研究
更多资讯见xiaok海洋测绘网
目前自主性技术、避碰技术、避免威胁技术、目标自动识别技术、子任务自动部署和恢复技术等还不成熟,需要进一步研究;无人船应用方面,水质采集、单波束测深应用较成熟,而船载设备收放需要进一步实验和研发。
以上是关于无人船文献综述的主要内容,如果未能解决你的问题,请参考以下文章
26页综述,99篇参考文献!自动驾驶的3D目标检测技术!中国人民大学出品!
26页综述,99篇参考文献!自动驾驶的3D目标检测技术!中国人民大学出品!