雷赛步进电机加减速时间应设置多少比较合理呢
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了雷赛步进电机加减速时间应设置多少比较合理呢相关的知识,希望对你有一定的参考价值。
问题如题。我想较快的起动电机。
这个问题需要看您的具体情况。严格的来说:首先,看你电机的资料上,允许的最大力矩是多少;
然后,再看您的机械负载有多重,也就是说:你的负载折算到电机的转轴上,相当于多大的转动惯量,以及除惯量以外还有没有摩擦力矩。
电机的力矩减去摩擦力矩剩下的才是可以产生加速度的力矩。
可以产生加速度的力矩,除以转动惯量,才是可以产生的加速度。
你需要达到的速度,除以可以产生的加速度,就是合适的加速时间了。
这些计算比较繁琐,故一般常采用试验的办法来代替。即:
以不发生明显“失步”为条件,用试验的办法,找到一个最快的加速度,然后再打一个折扣留出安全余量,即可。
当然,做这种试验的先决条件是:必须有一种检测是否发生失步的手段。通常,可以在软件中统计发出的控制信号是多少步,观察其实际转动多少步,看是否有差。追问
扭矩2N.M。。经验值一般为多少?
追答看您的机械负载有多重,如上所述。顺便强调一点,上面所说的“负载”,包括步进电机的转子本身。
参考技术A 当然若你的电机性能够好,或者设备要求响应要更快,那么可以设置的更短。比如100-500ms,当然若你的电机性能一般,或者设备响应没特别要求,那么可以设置的长一点。比如500-1500ms,
此外加减速时间的设置和机械还是有很大关系的,机械的惯性若是较大的话,建议加减速时间放长点比较好。加减速时间的设置,要取决于最后调试的结果,观察机械部分,做到启、停时机械部分运行自然协调就是很好了,时间短了,就会感觉太硬,时间设置长了,就会感觉太软,如需更多了解可百度深圳亚元素获取更多技术信息和支持。 参考技术B 不正确地驱动步进电机很容易导致电机发出“嗡嗡”的噪声和很大的振动。
当驱动步进电机时,如果发现步进电机处于静止状态时,其内部都发出很明显的噪音,有点类似线圈快速变化那种,一般是由于线圈电流过大导致的。对于这种情况,最有效的接决方法是降低电机线圈中流过的电流,具体方法包括:设置驱动器在电机停止时自动半流,减小电机的驱动电流。由于步进电机的工作方式,所以步进电机处于何种状态,其内部线圈都一直有电流变换。
当驱动步进电机动作时,如果发现步进电机噪声和振动很明显,应按如下步骤检查:
1、步进电机和驱动器是否配套,这是很关键的:如果它们并不配套的话,下面的一些步骤的调节细分、驱动电流、速度很可能都是白费力气。 在我自己的使用经历中,就遇到过这种情况,雷赛的电机用一个其他牌子的驱动器驱动,在其它条件一样的情况下,总是会产生很明显的噪声和振动,并带动机械结构发出很大的声响。同样,用雷赛的驱动器驱动一些其他厂家的步进电机,同样会发出很大的噪声和振动。所以建议大家在选用步进电机和驱动器的时候,最好是成套购买,并且要确保买到的是正规产品。现在市面上同一款型号的驱动器,都有很多厂家生产。比如DM542,比较正规的都有安科特和雷赛这些。
2、现在的步进电机驱动器分数字式和模拟式两种,模拟式的驱动步进电机时噪声较大,而数字式的基本没有。其原因大致在于数字式里面增加了一块DSP芯片进行步进电机驱动优化。所以如果要确保噪音和振动尽量小的话,建议选用数字式步进电机驱动器。
3、正确地调节步进电机驱动器的细分和电流,细分越大,电机里的线圈变化幅度也就越小,也就减轻了噪声。细分一般建议设置在8细分及以上,如果使用查表法来实现加减速和匀速时的速度计算、控制,对于一般的MCU,都是很容易胜任的。在保证步进电机有足够的力矩带动负载情况下,也应尽量减小驱动电流,该参数设置得越小,同样电机里的线圈电流变化幅度也就越小。 参考技术C 如果希望步进电机的启动速度要快,步进电机尽量采用并联连接的方式,工作电压适当高一些,电机加速过程中需要的力矩Te=Jβ+Tl,电机输出力矩Tm应大于其所需的力矩,其具体的加速度需参考其对应矩频曲线。针对某些起跳频率比较高地场合,英纳仕EZM系列步进驱动器可调整FIR指令滤波器,改善高起跳频率时的启动性能。 参考技术D 一般0.1s。还要看你运行速度是多少,如果运行速度大,那就把加减速时间设置大一点。
基于51单片机+ULN2003控制步进电机S曲线加减速
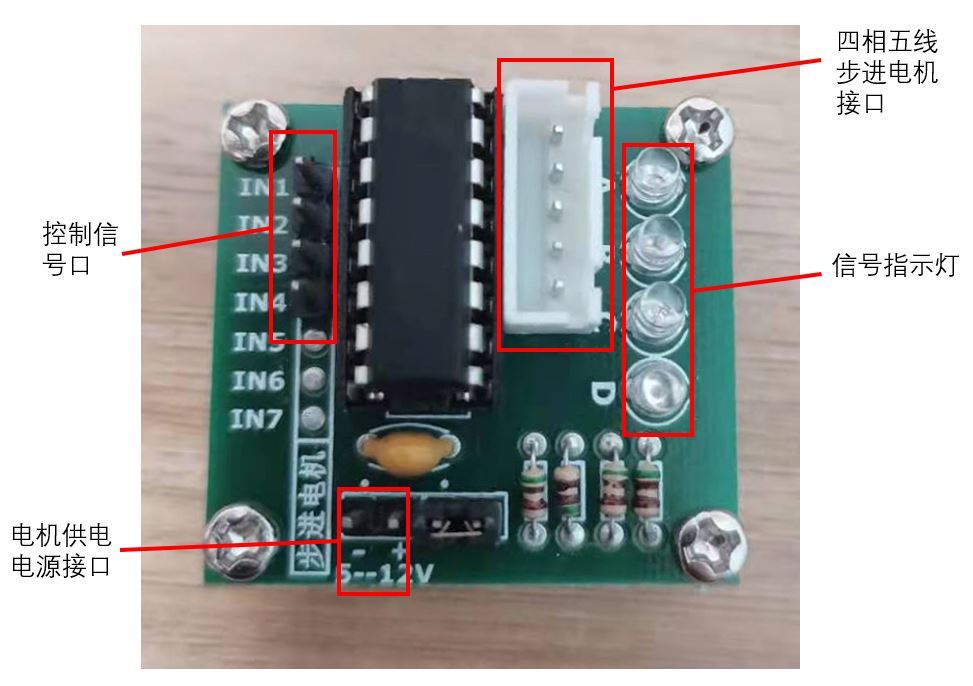
1.ULN2003功能简介
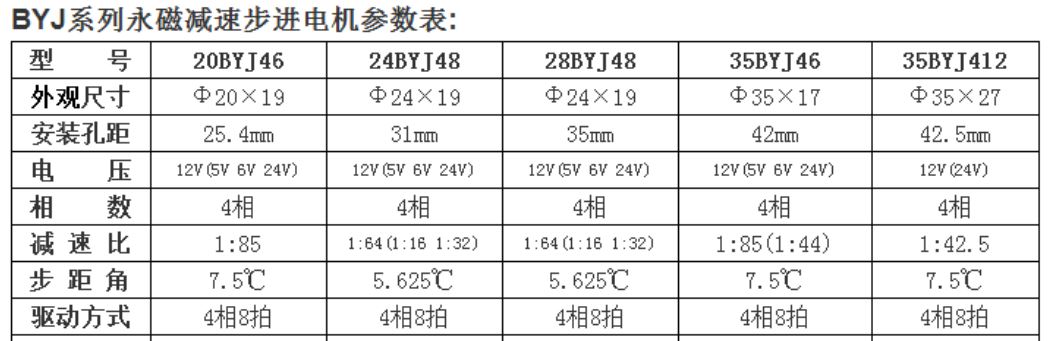
ULN2003比较简单,相关资料也比较多。可以用来驱动四线五相步进电机,例如常用的28BYJ和35BYJ系列,也可以用来驱动有抽头的HB42步进电机,单相电流可以到500mA,本文以28BYJ48为例进行介绍。
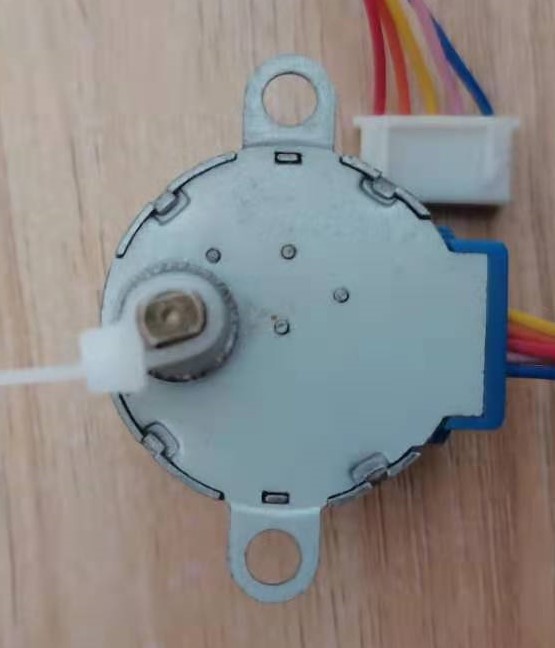
2.28BYJ48简介
①完整实物图如下
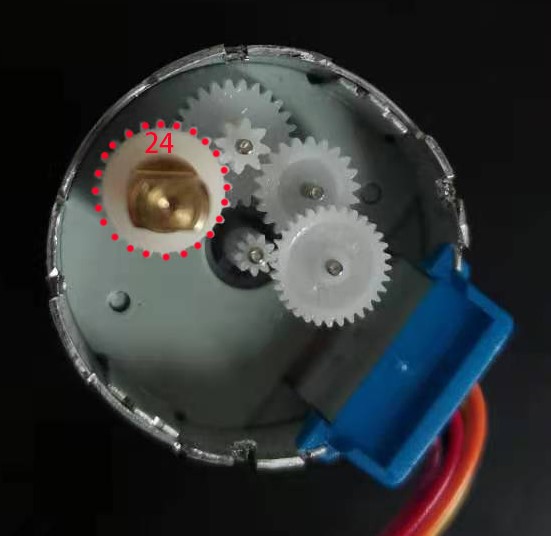
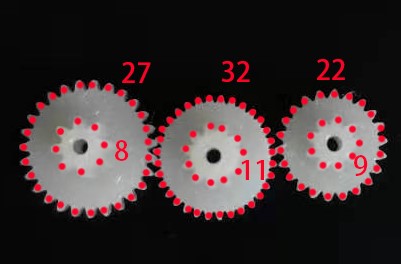
②拆去盖板是上层的4级齿轮组
传动比=从动齿轮齿数之积/主动齿轮齿数之积=(8X11X9X9)/(24X27X32X22)=1/64

③取出定子及转子
是一个永磁式的二相永磁式电机(PM),转子齿数是8,4拍运行时,每一步走360/(8X4)=11.25°。 8拍运行时,每一步走360/(8X8)=5.625°。这个地方要注意,一般资料写的是这个电机步距角是5.625,只有在8拍模式下才是5.625°。按照4拍运行时请按照11.25°计算。加上1/64的减速比,反应到输出轴上的步距角分别是11.25°/64=0.17578125°(4拍),5.625°/64=0.087890625°(8拍)。

常用的BGJ系列参数
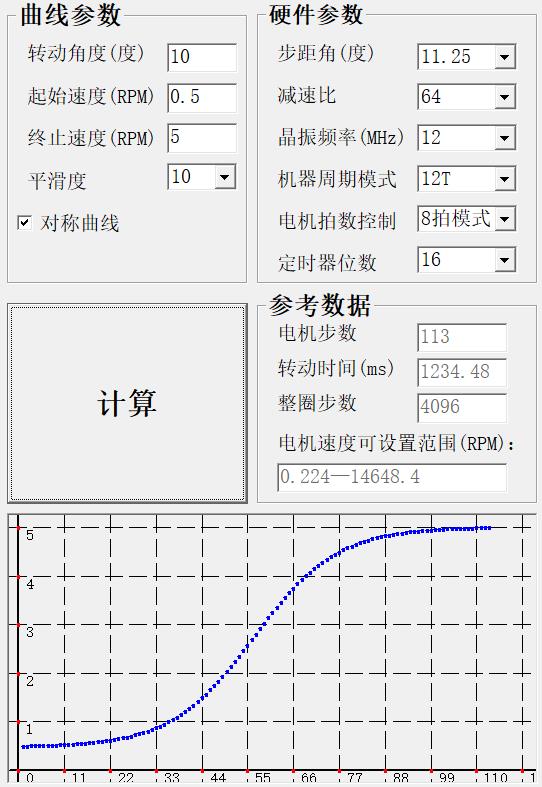
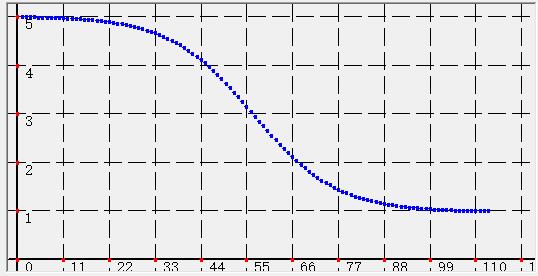
3.S曲线加减速方法
经过实物测试,在经过60°的S曲线加速,从1RPM可以加速到24RPM,继续增大转速就会堵转,比宣称14RPM高出很多。
加速过程实现方式是通过定时器中断,实现每一步的精确定时时间,定时时间要求速度按照Sigmoid(f(x)=1/(1+e^x))函数增大,减速过程可以是加速的逆向过程,或者单独计算。
4.proteus仿真及实物测试
原理图如下:
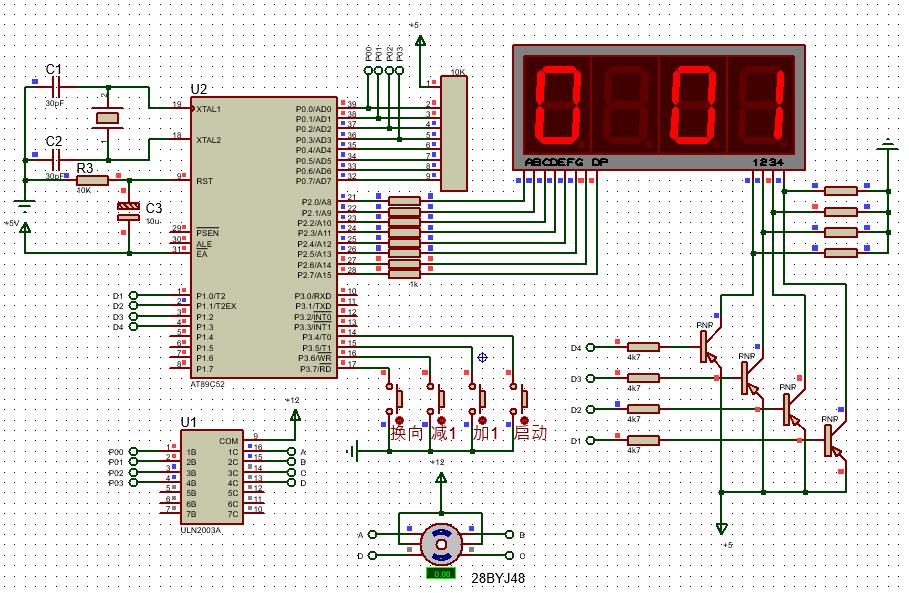
实物接线如下:采用的是5V电机,如果是用12V电机,记得共GND。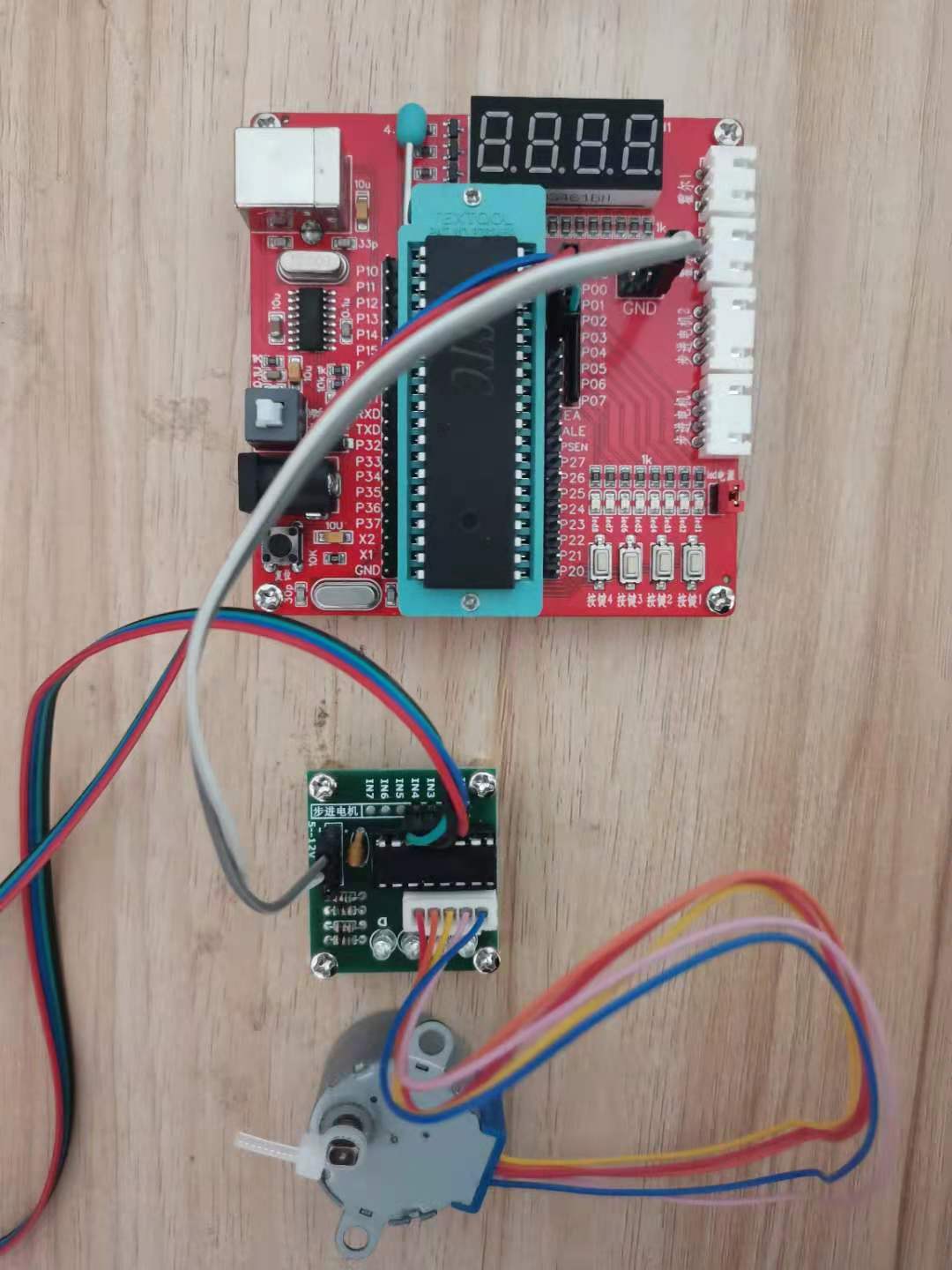
实物测试视频下载地址:
https://download.csdn.net/download/LuDanTongXue/18785085
Proteus及Keil源文件请见某宝,地址如下:
https://item.taobao.com/item.htm?spm=a2oq0.12575281.0.0.4c2f1debs4MNc6&ft=t&id=644250836870
微信/QQ:pph846375164
以上是关于雷赛步进电机加减速时间应设置多少比较合理呢的主要内容,如果未能解决你的问题,请参考以下文章