STC153路PWM波形输出示例演示
Posted perseverance52
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了STC153路PWM波形输出示例演示相关的知识,希望对你有一定的参考价值。
【STC15】3路PWM波形输出示例演示
本示例采用的是STC官方所给的《STC15系列库函数与例程测试版V2.0》里面的示例程序,测试的芯片型号:
STC15W408AS。自制的开发板,采用外部晶振16MHz。《【开源分享】自制STC15W408AS开发板》
- 使用逻辑分析仪实时采集的P25、P26、P27引脚的PWM波形。

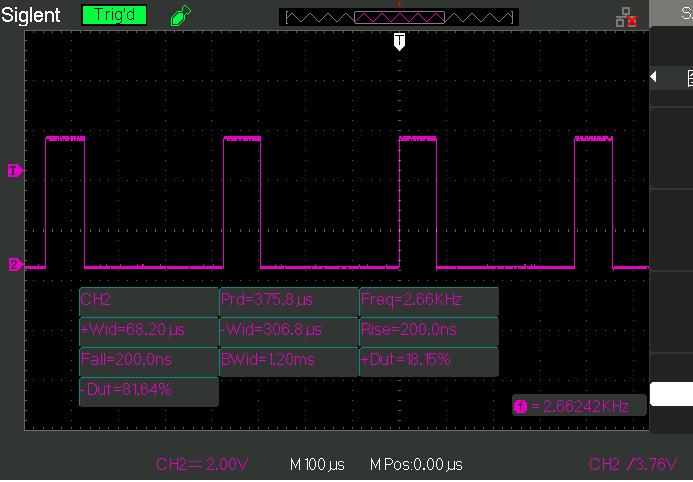
- 逻辑分析仪对波形数据参数测量显示:频率:
2.667KHz。
实测是符合预期效果的,采用的16MHz的晶振。
PWM频率 = MAIN_Fosc / PWM_DUTY,
MAIN_Fosc = 16MHZ, PWM_DUTY = 6000, 则输出PWM频率为2666.6666666.



- 示波器采集测试采集到的数据参数
程序代码
/*---------------------------------------------------------------------*/
/* --- STC MCU Limited ------------------------------------------------*/
/* --- Mobile: (86)13922805190 ----------------------------------------*/
/* --- Fax: 86-755-82905966 -------------------------------------------*/
/* --- Tel: 86-755-82948412 -------------------------------------------*/
/* --- Web: www.STCMCU.com --------------------------------------------*/
/* 如果要在文章中应用此代码,请在文章中注明使用了宏晶科技的资料及程序 */
/*---------------------------------------------------------------------*/
#include <reg52.h>
/************* 功能说明 **************
输出3路9~16位PWM信号。
PWM频率 = MAIN_Fosc / PWM_DUTY, 假设 MAIN_Fosc = 16MHZ, PWM_DUTY = 6000, 则输出PWM频率为2666.6666666.
******************************************/
/***************************用户宏定义*******************************************************/
#define MAIN_Fosc 16000000UL //定义主时钟
#define PWM_DUTY 6000 //定义PWM的周期,数值为PCA所选择的时钟脉冲个数。
#define PWM_HIGH_MIN 80 //限制PWM输出的最小占空比, 避免中断里重装参数时间不够。
#define PWM_HIGH_MAX (PWM_DUTY - PWM_HIGH_MIN) //限制PWM输出的最大占空比。
/********************************************************************************************/
#define PCA0 0
#define PCA1 1
#define PCA2 2
#define PCA_Counter 3
#define PCA_P12_P11_P10_P37 (0<<4)
#define PCA_P34_P35_P36_P37 (1<<4)
#define PCA_P24_P25_P26_P27 (2<<4)
#define PCA_Mode_PWM 0x42
#define PCA_Mode_Capture 0
#define PCA_Mode_SoftTimer 0x48
#define PCA_Mode_HighPulseOutput 0x4c
#define PCA_Clock_1T (4<<1)
#define PCA_Clock_2T (1<<1)
#define PCA_Clock_4T (5<<1)
#define PCA_Clock_6T (6<<1)
#define PCA_Clock_8T (7<<1)
#define PCA_Clock_12T (0<<1)
#define PCA_Clock_Timer0_OF (2<<1)
#define PCA_Clock_ECI (3<<1)
#define PCA_Rise_Active (1<<5)
#define PCA_Fall_Active (1<<4)
#define PCA_PWM_8bit (0<<6)
#define PCA_PWM_7bit (1<<6)
#define PCA_PWM_6bit (2<<6)
#define ENABLE 1
#define DISABLE 0
typedef unsigned char u8;
typedef unsigned int u16;
typedef unsigned long u32;
sfr AUXR1 = 0xA2;
sfr CCON = 0xD8;
sfr CMOD = 0xD9;
sfr CCAPM0 = 0xDA; //PCA模块0的工作模式寄存器。
sfr CCAPM1 = 0xDB; //PCA模块1的工作模式寄存器。
sfr CCAPM2 = 0xDC; //PCA模块2的工作模式寄存器。
sfr CL = 0xE9;
sfr CCAP0L = 0xEA; //PCA模块0的捕捉/比较寄存器低8位。
sfr CCAP1L = 0xEB; //PCA模块1的捕捉/比较寄存器低8位。
sfr CCAP2L = 0xEC; //PCA模块2的捕捉/比较寄存器低8位。
sfr CH = 0xF9;
sfr CCAP0H = 0xFA; //PCA模块0的捕捉/比较寄存器高8位。
sfr CCAP1H = 0xFB; //PCA模块1的捕捉/比较寄存器高8位。
sfr CCAP2H = 0xFC; //PCA模块2的捕捉/比较寄存器高8位。
sbit CCF0 = CCON^0; //PCA 模块0中断标志,由硬件置位,必须由软件清0。
sbit CCF1 = CCON^1; //PCA 模块1中断标志,由硬件置位,必须由软件清0。
sbit CCF2 = CCON^2; //PCA 模块2中断标志,由硬件置位,必须由软件清0。
sbit CR = CCON^6; //1: 允许PCA计数器计数,0: 禁止计数。
sbit CF = CCON^7; //PCA计数器溢出(CH,CL由FFFFH变为0000H)标志。
//PCA计数器溢出后由硬件置位,必须由软件清0。
sbit PPCA = IP^7; //PCA 中断 优先级设定位
sfr P2M1 = 0x95; //P2M1.n,P2M0.n =00--->Standard, 01--->push-pull
sfr P2M0 = 0x96; // =10--->pure input, 11--->open drain
//================================================================
sbit P25 = P2^5;
sbit P26 = P2^6;
sbit P27 = P2^7;
u16 CCAP0_tmp,PWM0_high,PWM0_low;
u16 CCAP1_tmp,PWM1_high,PWM1_low;
u16 CCAP2_tmp,PWM2_high,PWM2_low;
u16 pwm0,pwm1,pwm2;
void PWMn_Update(u8 PCA_id, u16 pwm);
void PCA_Init(void);
void delay_ms(u8 ms);
/******************** 主函数 **************************/
void main(void)
PCA_Init(); //PCA初始化
EA = 1;
P2M1 &= ~(0xe0); //P2.7 P2.6 P2.5 设置为推挽输出
P2M0 |= (0xe0);
while (1)
delay_ms(2);
if(++pwm0 >= PWM_HIGH_MAX) pwm0 = PWM_HIGH_MIN;
PWMn_Update(PCA0,pwm0);
if(++pwm1 >= PWM_HIGH_MAX) pwm1 = PWM_HIGH_MIN;
PWMn_Update(PCA1,pwm1);
if(++pwm2 >= PWM_HIGH_MAX) pwm2 = PWM_HIGH_MIN;
PWMn_Update(PCA2,pwm2);
//========================================================================
// 函数: void delay_ms(u8 ms)
// 描述: 延时函数。
// 参数: ms,要延时的ms数, 这里只支持1~255ms. 自动适应主时钟.
// 返回: none.
// 版本: VER1.0
// 日期: 2013-4-1
// 备注:
//========================================================================
void delay_ms(u8 ms)
unsigned int i;
do
i = MAIN_Fosc / 13000;
while(--i) ;
while(--ms);
//========================================================================
// 函数: void PWMn_SetHighReg(unsigned int high)
// 描述: 更新占空比数据。
// 参数: high: 占空比数据,即PWM输出高电平的PCA时钟脉冲个数。
// 返回: 无
// 版本: VER1.0
// 日期: 2013-5-15
// 备注:
//========================================================================
void PWMn_Update(u8 PCA_id, u16 pwm)
if(pwm > PWM_HIGH_MAX) pwm = PWM_HIGH_MAX; //如果写入大于最大占空比数据,强制为最大占空比。
if(pwm < PWM_HIGH_MIN) pwm = PWM_HIGH_MIN; //如果写入小于最小占空比数据,强制为最小占空比。
if(PCA_id == PCA0)
CR = 0; //停止PCA一会, 一般不会影响PWM。
PWM0_high = pwm; //数据在正确范围,则装入占空比寄存器。
PWM0_low = PWM_DUTY - pwm; //计算并保存PWM输出低电平的PCA时钟脉冲个数。
CR = 1; //启动PCA。
else if(PCA_id == PCA1)
CR = 0; //停止PCA。
PWM1_high = pwm; //数据在正确范围,则装入占空比寄存器。
PWM1_low = PWM_DUTY - pwm; //计算并保存PWM输出低电平的PCA时钟脉冲个数。
CR = 1; //启动PCA。
else if(PCA_id == PCA2)
CR = 0; //停止PCA。
PWM2_high = pwm; //数据在正确范围,则装入占空比寄存器。
PWM2_low = PWM_DUTY - pwm; //计算并保存PWM输出低电平的PCA时钟脉冲个数。
CR = 1; //启动PCA。
//========================================================================
// 函数: void PCA_Init(void)
// 描述: PCA初始化程序.
// 参数: none
// 返回: none.
// 版本: V1.0, 2013-11-22
//========================================================================
void PCA_Init(void)
CR = 0;
AUXR1 = (AUXR1 & ~(3<<4)) | PCA_P24_P25_P26_P27; //切换IO口
CCAPM0 = (PCA_Mode_HighPulseOutput | ENABLE); //16位软件定时、高速脉冲输出、中断模式
CCAPM1 = (PCA_Mode_HighPulseOutput | ENABLE);
CCAPM2 = (PCA_Mode_HighPulseOutput | ENABLE);
CH = 0;
CL = 0;
CMOD = (CMOD & ~(7<<1)) | PCA_Clock_1T; //选择时钟源
PPCA = 1; // 高优先级中断
pwm0 = (PWM_DUTY / 4 * 1); //给PWM一个初值
pwm1 = (PWM_DUTY / 4 * 2);
pwm2 = (PWM_DUTY / 4 * 3);
PWMn_Update(PCA0,pwm0);
PWMn_Update(PCA1,pwm1);
PWMn_Update(PCA2,pwm2);
CR = 1; // 运行PCA定时器
//======================================================================
//========================================================================
// 函数: void PCA_Handler (void) interrupt 7
// 描述: PCA中断处理程序.
// 参数: None
// 返回: none.
// 版本: V1.0, 2012-11-22
//========================================================================
void PCA_Handler (void) interrupt 7
if(CCF0) //PCA模块0中断
CCF0 = 0; //清PCA模块0中断标志
if(P25) CCAP0_tmp += PWM0_high; //输出为高电平,则给影射寄存器装载高电平时间长度
else CCAP0_tmp += PWM0_low; //输出为低电平,则给影射寄存器装载低电平时间长度
CCAP0L = (u8)CCAP0_tmp; //将影射寄存器写入捕获寄存器,先写CCAP0L
CCAP0H = (u8)(CCAP0_tmp >> 8); //后写CCAP0H
if(CCF1) //PCA模块1中断
CCF1 = 0; //清PCA模块1中断标志
if(P26) CCAP1_tmp += PWM1_high; //输出为高电平,则给影射寄存器装载高电平时间长度
else CCAP1_tmp += PWM1_low; //输出为低电平,则给影射寄存器装载低电平时间长度
CCAP1L = (u8)CCAP1_tmp; //将影射寄存器写入捕获寄存器,先写CCAP0L
CCAP1H = (u8)(CCAP1_tmp >> 8); //后写CCAP0H
if(CCF2) //PCA模块2中断
CCF2 = 0; //清PCA模块1中断标志
if(P27) CCAP2_tmp += PWM2_high; //输出为高电平,则给影射寄存器装载高电平时间长度
else CCAP2_tmp += PWM2_low; //输出为低电平,则给影射寄存器装载低电平时间长度
CCAP2L = (u8)CCAP2_tmp; //将影射寄存器写入捕获寄存器,先写CCAP0L
CCAP2H = (u8)(CCAP2_tmp >> 8); //后写CCAP0H
以上是关于STC153路PWM波形输出示例演示的主要内容,如果未能解决你的问题,请参考以下文章