单片机逻辑取反和按位取反差异
Posted perseverance52
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了单片机逻辑取反和按位取反差异相关的知识,希望对你有一定的参考价值。
单片机C语言开发逻辑取反和按位取反差异
新手入门容易犯的小错误。
示例程序
/*---------------------------------------------------------------------*/
/* --- STC MCU International Limited ----------------------------------*/
/* 如果要在程序中使用此代码,请在程序中注明使用了宏晶科技的资料及程序 */
/*---------------------------------------------------------------------*/
/************* 功能说明 **************
双串口全双工中断方式收发通讯程序。
通过PC向MCU发送数据, MCU收到后通过串口把收到的数据原样返回.
******************************************/
#define MAIN_Fosc 11059200L //定义主时钟
#include "STC15Fxxxx.H"
#include "stdio.h"
#define BaudRate1 9600L
#define UART1_BUF_LENGTH 32
#define RX1_Lenth 32 //串口接收缓冲长度
#define Timer1_Reload (65536UL -(MAIN_Fosc / 4 / BaudRate1)) //Timer 1 重装值, 对应300KHZ
u8 TX1_Cnt; //发送计数
u8 RX1_Cnt; //接收计数
bit B_TX1_Busy; //发送忙标志
u8 idata RX1_Buffer[UART1_BUF_LENGTH]; //接收缓冲
unsigned char *pchar; //定义一个全局指针
void UART1_config(u8 brt); // 选择波特率, 2: 使用Timer2做波特率, 其它值: 使用Timer1做波特率.
void PrintString1(u8 *puts);
//========================================================================
// 函数: void delay_ms(unsigned int ms)
// 描述: 延时函数。
// 参数: ms,要延时的ms数, 自动适应主时钟.
//========================================================================
void delay_ms(unsigned int ms)
unsigned int i;
do
i = MAIN_Fosc / 13000;
while(--i) ; //14T per loop
while(--ms);
void InitSerialPort(void)
SCON = 0x50; //8位数据,可变波特率
AUXR |= 0x40; //定时器时钟1T模式
AUXR &= 0xFE; //串口1选择定时器1为波特率发生器
TMOD &= 0x0F; //设置定时器模式
TH1 = (u8)(Timer1_Reload >> 8);
TL1 = (u8)Timer1_Reload;
ET1 = 0; //禁止定时器%d中断
TR1 = 1; //定时器1开始计时
ES=1; //串口中断开关,采用查询法时不用打开中断
REN=1; //串口为工作方式1,允许接收数据
SM0=0; //SM0 SM1串口工作方式选择,01:8位异步收发,波特率由定时器决定
SM1=1;
//========================================================================
// 函数: void main(void)
// 描述: 主函数。
// 参数: none.
// 返回: none.
// 版本: VER1.0
// 日期: 2014-11-28
// 备注:
//========================================================================
void main(void)
unsigned int n;
P0M1 = 0; P0M0 = 0; //设置为准双向口
P1M1 = 0; P1M0 = 0; //设置为准双向口
P2M1 = 0; P2M0 = 0; //设置为准双向口
P3M1 = 0; P3M0 = 0; //设置为准双向口
P4M1 = 0; P4M0 = 0; //设置为准双向口
P5M1 = 0; P5M0 = 0; //设置为准双向口
P6M1 = 0; P6M0 = 0; //设置为准双向口
P7M1 = 0; P7M0 = 0; //设置为准双向口
InitSerialPort();//串口初始化
EA = 1; //允许总中断
PrintString1("STC15F2K60S2 UART1 Test Prgramme!\\r\\n"); //SUART1发送一个字符串
while (1)
delay_ms(500);
n = ~0;
printf("uint = ~0:%u \\r\\n",n); //SUART1发送一个字符串
n = !0;
printf("uint = !0:%u \\r\\n",n); //SUART1发送一个字符串
P10 = !P10;
//========================================================================
// 函数: void PrintString1(u8 *puts)
// 描述: 串口1发送字符串函数。
// 参数: puts: 字符串指针.
// 返回: none.
// 版本: VER1.0
// 日期: 2014-11-28
// 备注:
//========================================================================
void PrintString1(u8 *puts) //发送一个字符串
for (; *puts != 0; puts++) //遇到停止符0结束
SBUF = *puts;
B_TX1_Busy = 1;
while(B_TX1_Busy);
//重写putchar函数,方便调用printf串口打印输出
char putchar(unsigned char c)
SBUF = c; //发送数据
while(!TI); //等待发送完成
TI=0; //清零发送标志位;
return c;
//========================================================================
// 函数: void UART1_int (void) interrupt UART1_VECTOR
// 描述: UART1中断函数。
// 参数: nine.
// 返回: none.
// 版本: VER1.0
// 日期: 2014-11-28
// 备注:
//========================================================================
void UART1_int (void) interrupt UART1_VECTOR
if(RI)
RI = 0;
RX1_Buffer[RX1_Cnt] = SBUF; //保存一个字节
if(++RX1_Cnt >= RX1_Lenth) RX1_Cnt = 0; //避免溢出处理
if(TI)
TI = 0;
B_TX1_Busy = 0; //清除发送忙标志
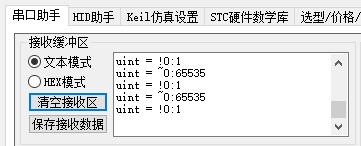
- 无符号整型数值0按位取反就是:
65535;逻辑取反值:1
以上是关于单片机逻辑取反和按位取反差异的主要内容,如果未能解决你的问题,请参考以下文章