kalman 一维递归算法 MATLAB演示
Posted haoming Hu
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了kalman 一维递归算法 MATLAB演示相关的知识,希望对你有一定的参考价值。
% 情景:对一个物体的长度进行测量
% 变量:
% XK0 :初始估计值
% Xk :当前估计值
% ZK :第K次测量值
% ZK0 : 第一次测量值
% EMEA :第K次测量误差(不考虑系统测量噪声,默认为一个定值)
% EESTK : 第K次估计误差
% EESTK0 : 初始估计误差(初始给一个定值)
% KK0 :初始卡尔曼增益
% KK :卡尔曼增益
% 步骤一:计算kalman增益:KK
% 第一次计算:KK0 = EESTK0/(EESTK0+EMEA) 得到初始kalman增益
% 第二次计算:KK = EESTK/(EESTK+EMEA) 得到往后的每一个kalman增益
%
% 步骤二:计算当前估计值:XK
% 第一次计算:XK0 = XK0+KK0*(ZK0-XK0) 得到初始估计值
% 第二次计算:XK = XK + KK(ZK-XK) 得到往后的估计值并更新
%
% 步骤三:计算估计误差:EESTK
% EESTK = (1-KK)*EESTK 得到往后的估计值
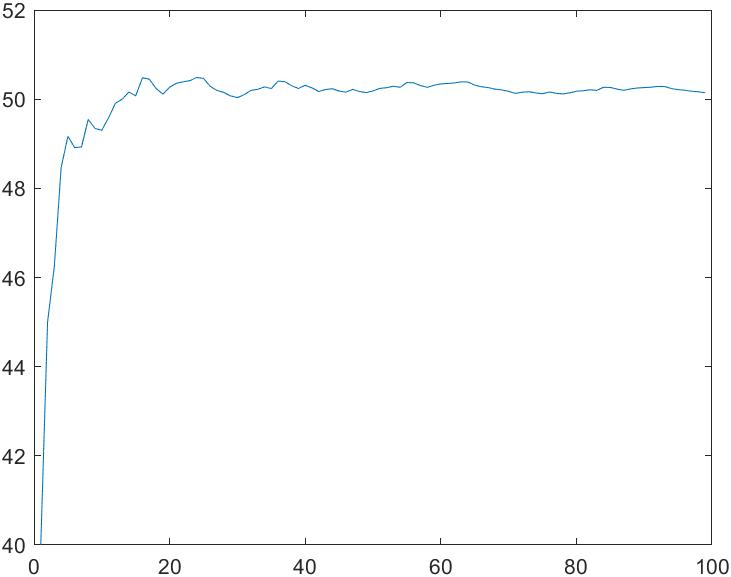
% 给定初始值 物体长度真实值为50
XK0 = 40;
EESTK0 = 5;
ZK0 = 51;
EMEA = 3;
% 计算
KK = [100];
XK = [100];
EESTK = [100];
ZK = [51,48,47,52,51,48,49,53,48,49,52,53,51,52,49,56,50,47,48,53,52,51,51,52,50,46,48,49,48,49,52,53,51,52,49,56,50,47,48,53,48,47,52,51,48,49,53,48,49,52,53,51,52,49,56,50,47,48,53,52,51,51,52,50,46,48,49,48,49,48,47,52,51,48,49,53,48,49,52,53,51,52,49,56,50,47,48,53,52,51,51,52,50,46,48,49,48,49,48,47,52,51,48,49,53,48,49,52,53,51,52,49,56,50,47,48,53,52,51,51,52,50,46,48,49,48,49,48,47,52,51,48,49,53,48,49,52,53,51,52,49,56,50,47,48,53,52,51,51,52,50,46,48,49,48,49];
KK0 = EESTK0/(EESTK0+EMEA);
KK(1) = KK0;
XK(1) = XK0;
EESTK(1) = EESTK0;
for i=2:99
KK(i) = EESTK(i-1)/(EESTK(i-1)+EMEA);
XK(i) = XK(i-1) + KK(i-1)*(ZK(i)-XK(i-1));
EESTK(i) = (1-KK(i))* EESTK(i-1);
end
plot(XK);
以上是关于kalman 一维递归算法 MATLAB演示的主要内容,如果未能解决你的问题,请参考以下文章