永磁同步伺服系统电流环整定问题,Iq不能跟随,电机输出Iq为负值,神马情况,请教高手
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了永磁同步伺服系统电流环整定问题,Iq不能跟随,电机输出Iq为负值,神马情况,请教高手相关的知识,希望对你有一定的参考价值。
在做永磁同步电机伺服控制系统,id=0控制。在做电流环的参数整定,开关频率为5kHz ,svpwm环节后加电机,电机参数Lq=8.5x10^-3 Rs=0.78电流环整定过程是消除大惯性环节1/(Lq*S+Rs)的影响,而且满足一定的超调的要求来设置电流PI调节器,参数就是按照这个要求来设置的现在出现的问题是:给定的id=0.iq设置为某一定值的时候,电机反馈回来的iq不能跟随给定,而且为负值!!!想请教下各位高手,这个是什么问题?什么原因引起的,具体参数整定调整时有没有什么好的建议或者办法?整天调这俩数字头都晕了!!有必要的话把仿真发上来请各位帮忙查错~~
大致调了一下,不过公司电脑不能外发,所以把调试结果告诉你吧,转速环kp,ki,max分别是0.16,2,1.3,两个电流环kp和ki采用同样的,kp为20,ki为10000,限幅值d轴调节器的限幅max为2.7,q轴调节器的限幅为96,还有你在给定参考速度时,应该不超过314/3,因为wm是转子角速度,额定频率50Hz时,电磁角速度we=314,因为你采用的电机极对数是3,所以应该在额定工况下,给定转速为314/3。 参考技术A 是要断开转速环,可以直接给定一个iq*的参考信号,然后调整电流环的PI参数,先调P,后加入I,总之调整的结果是要输出的iq基本跟随iq*给定,还有快速性稍微快一点,内环控制对快速性要求要相对高一些 参考技术B 我这几天也在调PMSM伺服系统的电流环PI……现在只加了P,id和iq算是稳定了,但总感觉哪里不对 参考技术C 有可能是转速环输出限幅值太小了,我之前也遇到过这样的情况,你可以将转速环和电流环的限幅值调大,建议整定参数时,先内环后外环,一步一步排查原因。如果有需要我可以帮你调整一下基于飞凌FET1052-C控制永磁同步交流伺服电机方案
一、前言介绍,背景描述运动控制、精密控制是目前众多行业设备的需求,为了使这些设备能以最佳的性能工作,采用经过改进的新型马达控制技术是关键所在。能效的提高是趋势所向,新技术同时还能带来更多的优势,如实现更加平稳的工作,大幅度降低噪声水平。众多制造商正在应对这些挑战,马达市场正在被更加高效的方案替代,如直流无刷(BLDC)和永磁同步电机(PMSM)。

近年来,采用全数字控制方法,以永磁交流电机为控制对象的全数字交流伺服系统正在逐渐取代以直流电机为控制对象的直流伺服系统和采用模拟控制技术的模拟式交流伺服系统。全数字交流伺服系统采用矢量控制方法,可实现优良的控制品质。
利用NXP最新发布的i.MXRT1052高性能处理器可实现对交流电机运行的位置、速度和电机电枢电流的高精度控制。该产品完美融合了低功耗应用处理器和高性能微控制器的优势。i.MX RT系列是业界首款跨界处理器,以实惠的价格提供超高性能 Arm? Cortex?-M内核、实时功能和MCU可用性。

二、飞凌FET1052-C特点
1、运行更快,响应更快
采用Cortex-M7架构,主频528MHz,CoreMark 3020 /1284 DMIPS;512KB紧耦合内存,中断延迟低至20ns;行业最低的动态功耗,带集成DC-DC转换器;

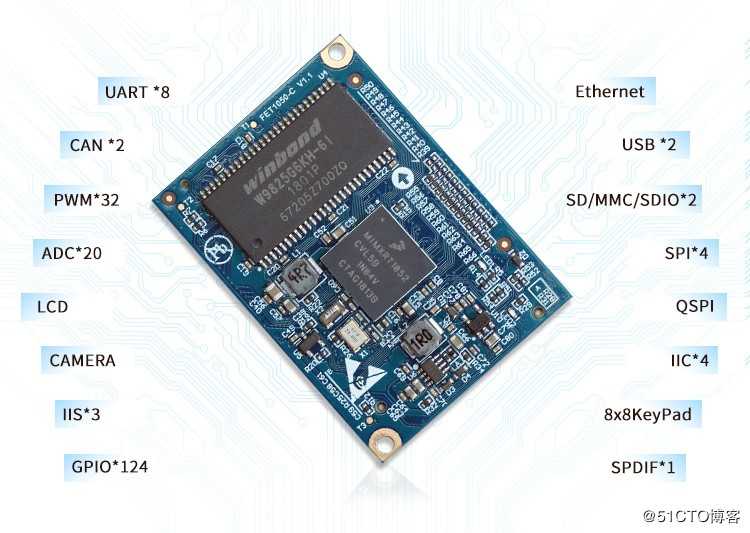
2、 扩展更强,接口更多
核心板引出多达124个GPIO,原生支持LCD、Camera、USB、UART、CAN、Ethernet、PWM等功能接口;
3、数据加密,工业品质
高可靠性引导(HAB),带实时QSPI Flash解密,128位AES加密和真随机数生成器,板卡设计充分考虑信号完整性,保证最佳的电气性能,-40-85℃温度标准 保证在严酷环境中稳定运行;
三、飞凌FET1052-C方案展示
1、PMSMs方案整体框图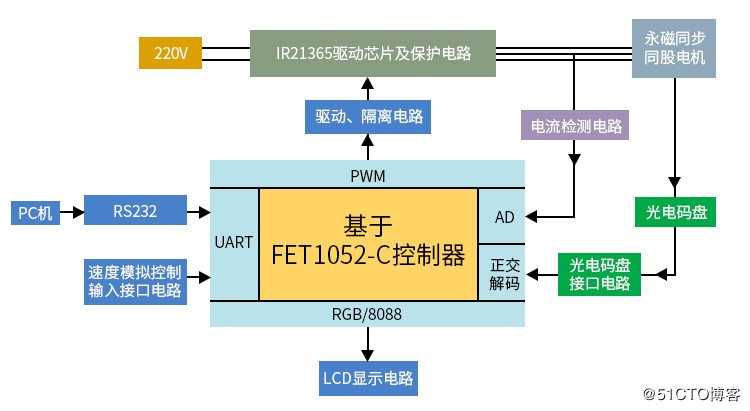
? RS232通讯接口电路用于PC机与FET1052-C核心板通讯的电平转换;
? 速度模拟控制输入接口电路用于速度控制信号以模拟的方式输入;
? LCD显示电路用于LCD显示速度、人机交互等信息;
? 光电码盘接口电路用于光电码盘与i.MX RT1052的连接;
? 电流检测电路用于U和V相电流的检测;
? 驱动、隔离电路用于隔离驱动逆变电路;
2、电流检测电路
i.MX RT 1052支持两个高精度AD转换控制器,每个控制器支持16个通道。高达12bit分辨率的线性逐次逼近算法,1MS/S的采样速率,支持中断与轮训方式采样,可实现对电机的三相电压采样无需进行相位补偿。但由于是单极性的所以对交流采样时要加提升电路,使交流信号电压范围在 0V~3.3V 之间。本方案中使用了3路 A/D 转换输入,分别为两路电流检测和一路模拟信号输入采样。电流检测就是把交流电机的两相定子电流转换成相应的二进制代码,以方便处理。因为本系统是三相平衡系统IA + IB + IC = 0,因此只要检测其中两路电流,就可以得到三相电流。由于霍尔元件输出的是弱电流信号,因此,应将该电流信号转换成电压信号,然后经过滤波加法处理,由于霍尔电流传感器的输出为有正负方向的电流信号,而 i.MX RT 1052片内 A/D 转换器为单极性输入为 0~3.3V的电压信号,因此要有电压偏移电路。
特性:
? 配置寄存器
? 32 位字对齐的字节使能寄存器。(字节和半字访问是不支持的)
? 带 10/11 位精度的高达 12 位分辨率的线性逐次逼近算法。
? 最多 10 个 ENOB(专用单端通道)
? 高达 1MS / s 的采样率
? 最多 8 个单端外部模拟输入
? 单次或连续转换(单次转换后自动返回到空闲状态)
? 输出模式:8 位,10 位,12 位
? 可配置采样时间和转换速度/功率
? 转换完成和硬件平均功能完成会产生标志和中断
? 输入时钟最多可选择三个来源
? 可选择异步时钟源作为输出时钟,这样可降低噪声
? 可通过选择硬件通道来选择异步硬件转换触发
3、光电码盘接口电路
i.MX RT 1052支持四路正交解码器(ENC),利用来自位置/速度传感器的 5 个输入信号( PHASEA, PHASEB, INDEX, TRIGGER 和 HOME),正交解码器模块对轴位置,转数和速度进行解码,正交编码脉冲电路可用于连接光电编码器以获得旋转机械的位置和速率等信息。
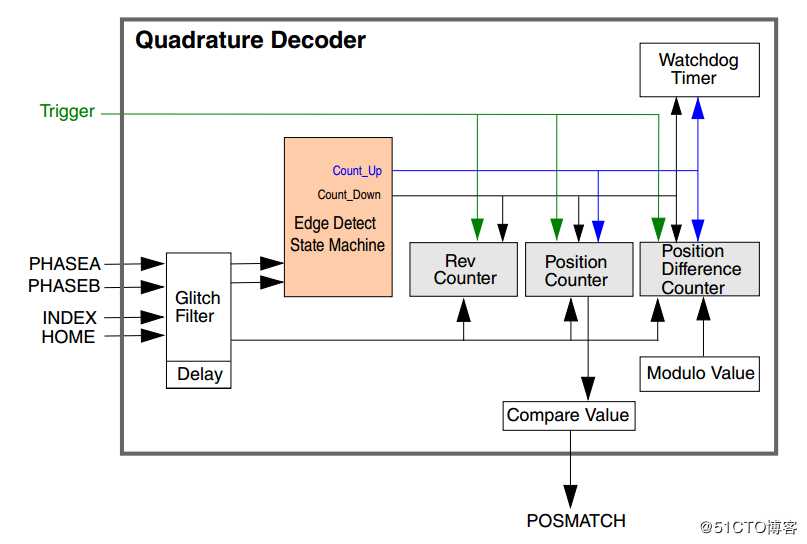
i.MX RT1052正交解码方块图
特性:
? 包括逻辑以解码正交信号;
? 输入可连接到通用定时器,以进行低速度测量;
? 可配置的数字滤波器用于输入;
? 正交解码器滤波器可以被旁路;
? 可以进行模数计数的 32 位的位置计数器;
? 位置计数器可以通过软件或外部事件进行初始化;
? 比较功能可以显示轴何时到达了规定的位置;
? 看门狗定时器可以检测到轴不旋转的状况;
? 可预加载的 16 位转数计数器;
?16位位置差异寄存器;
4、驱动隔离电路
可使用由IR公司所生产的IR2132来驱动G4PH50UD-E(IGBT),构建成三相逆变器。因为i.MX RT1052所产生的PWM波形频率比较高,用一般的低速光耦会使得驱动电路的开关时间变长,在低速,小负载时会严重影响到电机的低速性能,所以可选用高速光耦,有效提高逆变器的快速性。
i.MX RT1052最高支持32路PWM输出,包含 PWM 子模块,每个子模块都设计为控制单个半桥功率级。 提供故障通道支持。 该 PWM 模块可以产生各种开关模式,包括高度的复杂的波形。 支持控制所有已知的电机类型,也是控制不同开关模式电源( SMPS)拓扑的理想选择。
特性:
? 支持 16 位分辨率的中心,边缘对齐和非对称 PWM 模式
? 可以作为互补对或独立通道工作的 PWM 输出
? 独立控制每个 PWM 输出的两个边沿
? 支持与外部硬件或其他 PWM 同步
? 双缓冲 PWM 寄存器
? 从 1 到 16 的积分重载率
? 半循环重载能力
? 可以通过硬件在每个 PWM 周期内产生多个输出触发事件
5、RS232通讯、显示电路
i.MX RT1052最高支持8路UART、2路CAN接口,方便扩展其他功能应用;支持8/16/24 位 LCD 接口,支持最大 1366×768 分辨率,支持4.3、7寸电阻触摸,支持 8/16-bit MPU/8080 接口。支持2D图形加速引擎,支持emWIN图形界面;
飞凌嵌入式OK1052-C开发板支持裸机、FreeRTOS、ucLinux操作系统开发,方便客户不同场合的产品应用。MCU模式支持Keil、IAR、ARM-GCC等编译器,同时还支持Amazon FreeRTOS、SDK、ARM mbed以及软件库、在线工具和相应支持的全球 ARM 生态系统来实现快速原型制作和开发。 MPU模式依然采用工程师最为熟悉的Ubuntu+GCC开发方式。
FET1052-C核心板分为两种配置:
本次方案充分展示了FET1052-C在电机控制方面突出的性能优势以及接口丰富程度,如需两个PMSM电机控制方案可以参考NXP官网应用笔记AN12200(Dual FOC Servo Motor Control on i.MX RT)。
以上是关于永磁同步伺服系统电流环整定问题,Iq不能跟随,电机输出Iq为负值,神马情况,请教高手的主要内容,如果未能解决你的问题,请参考以下文章