ARM指令和THUMB指令有啥区别
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ARM指令和THUMB指令有啥区别相关的知识,希望对你有一定的参考价值。
Thumb指令集与 ARM 指令的区别一般有如下几点:跳转指令
程序相对转移,特别是条件跳转与 ARM 代码下的跳转相比,在范围上有更多的限制,转向子程序是无条件的转移。
数据处理指令
数据处理指令是对通用寄存器进行操作,在大多数情况下,操作的结果须放入其中一个操作数寄存器中,而不是第 3 个寄存器中。数据处理操作比 ARM 状态的更少,访问寄存器 R8~R15 受到一定限制。除 MOV 和 ADD 指令访问器 R8~R15 外,其它数据处理指令总是更新 CPSR 中的 ALU 状态标志。访问寄存器 R8~R15 的 Thumb 数据处理指令不能更新 CPSR 中的 ALU 状态标志。
单寄存器加载和存储指令
在 Thumb 状态下,单寄存器加载和存储指令只能访问寄存器 R0~R7
批量寄存器加载和存储指令
LDM 和 STM 指令可以将任何范围为 R0~R7 的寄存器子集加载或存储。 PUSH 和 POP 指令使用堆栈指令 R13 作为基址实现满递减堆栈。除 R0~R7 外,PUSH 指令还可以存储链接寄存器 R14,并且 POP 指令可以加载程序指令PC 参考技术A Thumb指令集与 ARM 指令的区别一般有如下几点:
跳转指令
程序相对转移,特别是条件跳转与 ARM 代码下的跳转相比,在范围上有更多的限制,转向子程序是无条件的转移.
数据处理指令
数据处理指令是对通用寄存器进行操作,在大多数情况下,操作的结果须放入其中一个操作数寄存器中,而不是第 3 个寄存器中.数据处理操作比 ARM 状态的更少,访问寄存器 R8~R15 受到一定限制.除 MOV 和 ADD 指令访问器 R8~R15 外,其它数据处理指令总是更新 CPSR 中的 ALU 状态标志.访问寄存器 R8~R15 的 Thumb 数据处理指令不能更新 CPSR 中的 ALU 状态标志.
单寄存器加载和存储指令
在 Thumb 状态下,单寄存器加载和存储指令只能访问寄存器 R0~R7
批量寄存器加载和存储指令
LDM 和 STM 指令可以将任何范围为 R0~R7 的寄存器子集加载或存储. PUSH 和 POP 指令使用堆栈指令 R13 作为基址实现满递减堆栈.除 R0~R7 外,PUSH 指令还可以存储链接寄存器 R14,并且 POP 指令可以加载程序指令PC 参考技术B 回答
Thumb 指令可以看作是 ARM 指令压缩形式的子集,是针对代码密度的问题而提出的,它具有 16 位的代码密度但是它不如ARM指令的效率高 .Thumb 不是一个完整的体系结构,不能指望处理只执行Thumb 指令而不支持 ARM 指令集.因此,Thumb 指令只需要支持通用功能,必要...
因此,Thumb 指令只需要支持通用功能,必要时可以借助于完善的 ARM 指令集,比如,所有异常自动进入 ARM 状态.在编写 Thumb 指令时,先要使用伪指令 CODE16 声明,而且在 ARM 指令中要使用 BX指令跳转到 Thumb 指令,以切换处理器状态.编写 ARM 指令时,则可使用伪指令 CODE32声明.
参考技术C CODE32伪指令通知编译器,其后的指令序列为32位的ARM指令。 若在汇编源程序中同时包含ARM指令和Thumb指令时,可用CODE16伪指令通知编译器其后的指令序列为16位的Thumb指令,CODE32伪指令通知编译器其后的指令序列为32位的ARM指令。因此,在使用ARM指令和Thumb指令混合编程的代码里,可用这两条伪指令进行切换,但注意他们只通知编译器其后指令的类型,并不能对处理器进行状态的切换。 使用示例: AREA Init,CODE,READONLY CODE32 ;通知编译器其后的指令为32位的ARM指令 LDR R0,=NEXT+1 ;将跳转地址放入寄存器R0 BX R0 ;程序跳转到新的位置执行,并将处理器切换到Thumb工作状态 CODE16 ;通知编译器其后的指令为16位的Thumb指令 NEXT LDR R3,=0x3FF END ;程序结束2、Thumb指令及应用 为兼容数据总线宽度为16位的应用系统,ARM体系结构除了支持执行效率很高的32位ARM指令集以外,同时支持16位的Thumb指令集。Thumb指令集是ARM指令集的一个子集,允许指令编码为16位的长度。与等价的32位代码相比较,Thumb指令集在保留32代码优势的同时,大大的节省了系统的存储空间。 所有的Thumb指令都有对应的ARM指令,而且Thumb的编程模型也对应于ARM的编程模型,在应用程序的编写过程中,只要遵循一定调用的规则,Thumb子程序和ARM子程序就可以互相调用。当处理器在执行ARM程序段时,称ARM处理器处于ARM工作状态,当处理器在执行Thumb程序段时,称ARM处理器处于Thumb工作状态。 与ARM指令集相比较,Thumb指令集中的数据处理指令的操作数仍然是32位,指令地址也为32位,但Thumb指令集为实现16位的指令长度,舍弃了ARM指令集的一些特性,如大多数的Thumb指令是无条件执行的,而几乎所有的ARM指令都是有条件执行的;大多数的Thumb数据处理指令的目的寄存器与其中一个源寄存器相同。 由于Thumb指令的长度为16位,即只用ARM指令一半的位数来实现同样的功能,所以,要实现特定的程序功能,所需的Thumb指令的条数较ARM指令多。在一般的情况下,Thumb指令与ARM指令的时间效率和空间效率关系为: - Thumb代码所需的存储空间约为ARM代码的60%~70% - Thumb代码使用的指令数比ARM代码多约30%~40% - 若使用32位的存储器,ARM代码比Thumb代码快约40% - 若使用16位的存储器,Thumb代码比ARM代码快约40%~50% - 与ARM代码相比较,使用Thumb代码,存储器的功耗会降低约30% 显然,ARM指令集和Thumb指令集各有其优点,若对系统的性能有较高要求,应使用32位的存储系统和ARM指令集,若对系统的成本及功耗有较高要求,则应使用16位的存储系统和Thumb指令集。当然,若两者结合使用,充分发挥其各自的优点,会取得更好的效果。本回答被提问者采纳
ida Pro ARM指令集和Thumb指令集的切换
在动态调试android的ndk程序的时候,发现很多程序都会反汇编错误,原来是ARM反汇编的模式没搞对。因为在动态调试的时候,ida Pro并没有去解析elf模块中的一些信息,造成了模块信息丢失,有时候反汇编就会错误。
类似下面这样:
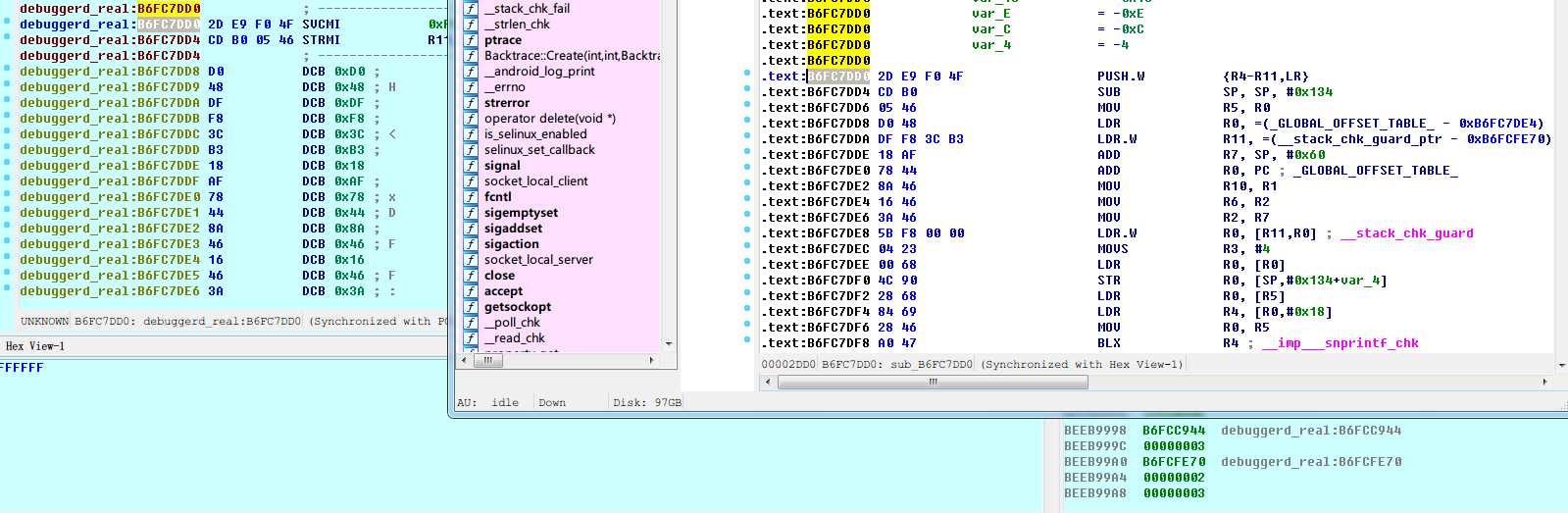
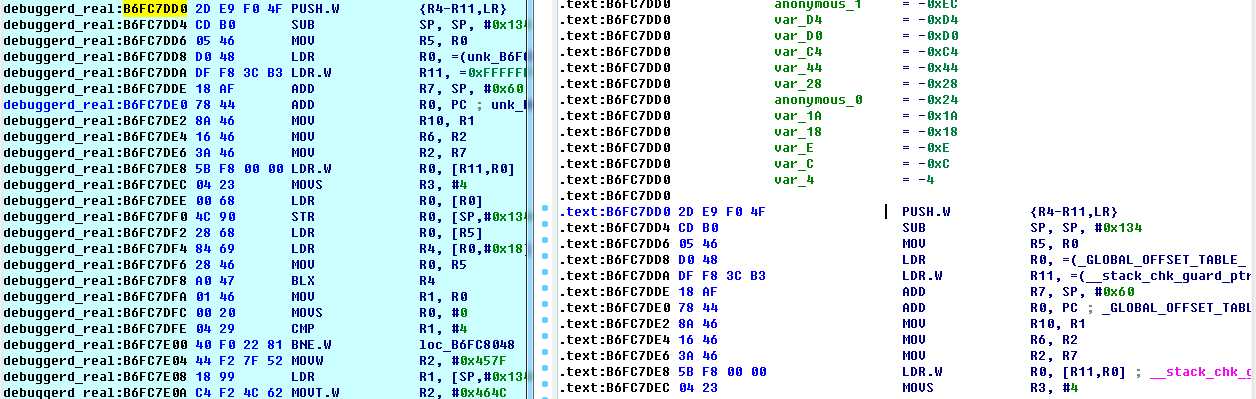
B6FC7DD0明显反汇编错了,成SVCMI指令了,解决方法也很简单,这里记录一下!
在IDA中可以Edit->segments->change segment register value(快捷键ALT+G)中改变T的值来改变IDA对代码的解析方式
- 0为ARM
- 1为thumb
以上是关于ARM指令和THUMB指令有啥区别的主要内容,如果未能解决你的问题,请参考以下文章
GNU Arm 嵌入式工具链 | arm-none-eabi-gcc 选项:Thumb (-mthumb) 和 Arm (-marm) 状态有啥区别?