Arduino PID库简介
Posted 蔚蓝慕
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Arduino PID库简介相关的知识,希望对你有一定的参考价值。
Arduino PID库 – 简介
时间久远,可以参考
原文地址
随着新的Arduino PID库的发布,我决定发布这一系列的文章。最后一个库虽然很可靠,但并没有真正附带任何代码解释。这一次的计划是详细解释为什么代码是这样的。我希望这对两种人有用:
- 对Arduino PID库内部发生的事情直接感兴趣的人将获得详细的解释。
- 任何编写自己的PID算法的人都可以看看我是如何做事的,并借用他们喜欢的任何东西。
这将是一个艰难的过程,但我想我找到了一种不太痛苦的方式来解释我的代码。我将从我所谓的“初学者的PID”开始。然后,我将逐步改进它,直到我们得到一个高效、健壮的 pid 算法。
初学者的PID
这是每个人第一次学习的PID方程:
这导致几乎每个人都编写以下PID控制器:
/*working variables*/
unsigned long lastTime;
double Input, Output, Setpoint;
double errSum, lastErr;
double kp, ki, kd;
void Compute()
/*How long since we last calculated*/
unsigned long now = millis();
double timeChange = (double)(now - lastTime);
/*Compute all the working error variables*/
double error = Setpoint - Input;
errSum += (error * timeChange);
double dErr = (error - lastErr) / timeChange;
/*Compute PID Output*/
Output = kp * error + ki * errSum + kd * dErr;
/*Remember some variables for next time*/
lastErr = error;
lastTime = now;
void SetTunings(double Kp, double Ki, double Kd)
kp = Kp;
ki = Ki;
kd = Kd;
Compute() 被定期或不定期调用,它运行良好。不过,这个系列并不是关于“效果很好”。如果我们要把这段代码变成与工业PID控制器相提并论的东西,我们必须解决一些问题:
- **sample time采样时间 –**PID 算法如果定期评估,则功能最佳。如果算法知道这个区间,我们还可以简化一些内部数学。
- **Derivative Kick –**这不是最大的问题,很容易摆脱,所以我们要这样做。
- **On-The-Fly Tuning Changes即时调谐更改 –**一个好的PID算法是可以在不干扰内部工作的情况下更改调谐参数的算法。
- **Reset Windup Mitigation重置清盘缓解 –**我们将介绍什么是重置清盘,并实施具有副作用的解决方案
- **on/off(Auto/Manual开/关(自动/手动)–**在大多数应用中,有时希望关闭PID控制器并手动调整输出,而不会干扰控制器
- **Initialization初始化–**当控制器首次打开时,我们想要“无颠簸传输”。也就是说,我们不希望输出突然猛地跳动到某个新值。
- **Controller Direction控制器方向 –**最后一个并不是健壮性名称本身的更改。 它旨在确保用户输入具有正确符号的优化参数。
- **NEW: Proportional on Measurement新:测量比例 –**添加此功能可以更轻松地控制某些类型的进程
一旦我们解决了所有这些问题,我们将拥有一个可靠的PID算法。我们还将拥有在最新版本的Arduino PID库中使用的代码。因此,无论您是尝试编写自己的算法,还是尝试了解PID库中发生的事情,我都希望对您有所帮助。让我们开始吧。
下一>>
更新:在所有代码示例中,我都使用双精度。在Arduino上,双精度与浮点数相同(单精度)。真正的双精度对于PID来说是矫枉过正的。如果您使用的语言确实是双精度,我建议将所有双精度更改为浮点数。
提高初学者的 PID – 采样时间
(这是关于编写固定 PID 算法的更大系列中的修改 #1)
问题所在
初学者的PID被设计为不规则地调用。这会导致 2 个问题:
- 您不会从 PID 获得一致的行为,因为有时它经常被调用,有时则不然。
- 你需要做额外的数学计算导数和积分,因为它们都依赖于时间的变化。
解决方案
确保定期调用 PID。我决定这样做的方法是指定每个周期调用计算函数。根据预先确定的采样时间,PID 决定是否应立即计算或返回。
一旦我们知道PID正在以恒定的间隔进行评估,也可以简化导数和积分计算。
《代码》
/*working variables*/
unsigned long lastTime;
double Input, Output, Setpoint;
double errSum, lastErr;
double kp, ki, kd;
int SampleTime = 1000; //1 sec
void Compute()
unsigned long now = millis();
int timeChange = (now - lastTime);
if(timeChange>=SampleTime)
/*Compute all the working error variables*/
double error = Setpoint - Input;
errSum += error;
double dErr = (error - lastErr);
/*Compute PID Output*/
Output = kp * error + ki * errSum + kd * dErr;
/*Remember some variables for next time*/
lastErr = error;
lastTime = now;
void SetTunings(double Kp, double Ki, double Kd)
double SampleTimeInSec = ((double)SampleTime)/1000;
kp = Kp;
ki = Ki * SampleTimeInSec;
kd = Kd / SampleTimeInSec;
void SetSampleTime(int NewSampleTime)
if (NewSampleTime > 0)
double ratio = (double)NewSampleTime
/ (double)SampleTime;
ki *= ratio;
kd /= ratio;
SampleTime = (unsigned long)NewSampleTime;
在第 10 行和第 11 行,算法现在自行决定是否需要计算。此外,因为我们现在知道样本之间的时间是相同的,所以我们不需要不断地乘以时间变化。我们只能适当地调整 Ki 和 Kd(第 31 和 32 行),结果在数学上是等价的,但效率更高。
不过,这样做有点问题。如果用户决定在操作过程中更改采样时间,则需要重新调整Ki和Kd以反映此新更改。这就是第 39-42 行的全部内容。
另请注意,我将第 29 行的采样时间转换为秒。严格来说,这不是必需的,但允许用户以 1/秒为单位输入 Ki 和 Kd,而不是 1/mS。
结果
上述更改为我们做了 3 件事
- 无论调用 Compute() 的频率如何,PID 算法都将定期评估 [第 11 行]
- 由于时间减法 [第 10 行],当 millis() 返回 0 时不会有问题。这每 55 天才会发生一次,但我们要防止还记得吗?
- 我们不再需要乘以时间变化。由于它是一个常量,我们可以将其从计算代码 [第 15+16 行] 中移出,并将其与调优常量 [第 31+32 行] 混为一谈。从数学上讲,它的工作原理相同,但是每次计算PID时都会节省乘法和除法
关于中断的旁注
如果这个PID进入微控制器,则可以为使用中断提出一个很好的论据。SetSampleTime 设置中断频率,然后在需要时调用 Compute。在这种情况下,不需要第 9-12、23 和 24 行。如果您打算用PID影响来做到这一点,那就去做吧!不过,请继续阅读本系列。希望您仍然可以从随后的修改中获得一些好处。
我没有使用中断有三个原因
- 就本系列而言,并不是每个人都能使用中断。
- 如果您希望它同时实现许多PID控制器,事情会变得棘手。
- 老实说,我没有想到。吉米·罗杰斯(Jimmie Rodgers)在为我校对该系列时提出了这个建议。我可能决定在PID库的未来版本中使用中断。
提高初学者的 PID – Derivative Kick
(这是关于编写可靠 PID 算法的更大系列中的修改 #2)
问题所在
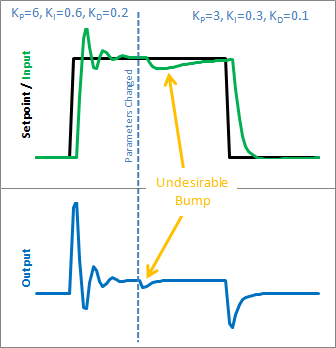
此修改将稍微调整derivative term。目标是消除一种称为“Derivative Kick”的现象。
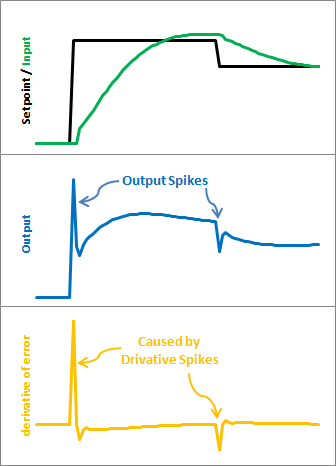
上图说明了问题。由于error=Setpoint-Input,因此Setpoint的任何更改都会导致误差的瞬时变化。这种变化的导数是无穷大(在实践中,由于 dt 不是 0,它最终只是一个非常大的数字。该数字被馈入pid方程,从而导致输出中出现不希望的尖峰。幸运的是,有一种简单的方法可以摆脱这种情况。
解决方案
事实证明,误差的导数等于输入的负导数,除非设定值发生变化。这最终是一个完美的解决方案。我们不是加(Kd * 误差的导数),而是减去(输入的 Kd * 导数)。这称为使用“测量导数”
《代码》
/*working variables*/
unsigned long lastTime;
double Input, Output, Setpoint;
double errSum, lastInput;
double kp, ki, kd;
int SampleTime = 1000; //1 sec
void Compute()
unsigned long now = millis();
int timeChange = (now - lastTime);
if(timeChange>=SampleTime)
/*Compute all the working error variables*/
double error = Setpoint - Input;
errSum += error;
double dInput = (Input - lastInput);
/*Compute PID Output*/
Output = kp * error + ki * errSum - kd * dInput;
/*Remember some variables for next time*/
lastInput = Input;
lastTime = now;
void SetTunings(double Kp, double Ki, double Kd)
double SampleTimeInSec = ((double)SampleTime)/1000;
kp = Kp;
ki = Ki * SampleTimeInSec;
kd = Kd / SampleTimeInSec;
void SetSampleTime(int NewSampleTime)
if (NewSampleTime > 0)
double ratio = (double)NewSampleTime
/ (double)SampleTime;
ki *= ratio;
kd /= ratio;
SampleTime = (unsigned long)NewSampleTime;
这里的修改非常简单。我们将 +dError 替换为 -dInput。我们现在不再记住最后一个错误,而是记住最后一个输入
结果
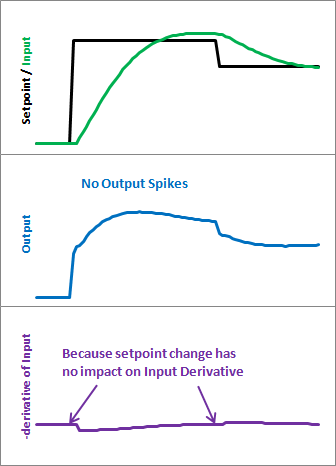
以下是这些修改给我们带来的结果。请注意,输入看起来仍然大致相同。因此,我们获得了相同的性能,但我们不会在每次设定值更改时都发出巨大的输出峰值。
这可能是也可能不是什么大问题。这完全取决于您的应用程序对输出峰值的敏感程度。不过,在我看来,不突变就不需要做更多的工作,所以为什么不把事情做好呢?
下一>>
改进初学者的 PID:调整更改
(这是关于编写固体 PID 算法的更大系列中的修改 #3)
问题所在
在系统运行时更改调谐参数的能力对于任何PID算法都是必须的。
初学者的PID在运行时尝试整定,表现得有点疯狂。让我们看看为什么。以下是上述参数更改前后初学者的PID状态:
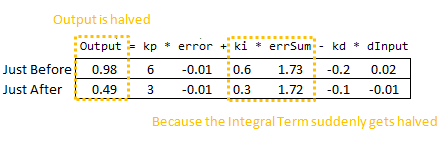
因此,我们可以立即将这种颠簸归咎于积分项(或“I 项”)。这是参数更改时唯一发生巨大变化的东西。为什么会这样?这与初学者对积分的解释有关:

在 Ki 更改之前,这种解释效果很好。然后,突然之间,您将这个新 Ki 乘以您累积的整个误差总和。那不是我们想要的!我们只想影响事情的发展!
解决方案
我知道有几种方法可以解决这个问题。我在上一个库中使用的方法是重新缩放 errSum。Ki加倍了?将errSum减半。这样可以防止 I 项发生碰撞,并且它有效。不过有点笨拙,我想出了更优雅的东西。(我不可能是第一个想到这一点的人,但我确实自己想到了。
解决方案需要一点基本的代数(或者是微积分?
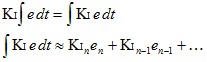
我们不是让 Ki 生活在积分之外,而是把它带入内部。看起来我们什么都没做,但我们会看到在实践中这有很大的不同。
现在,我们取error并将其乘以当时的 Ki。然后我们存储 THAT 的总和。当 Ki 发生变化时,不会有颠簸,因为可以这么说,所有旧的 Ki 都已经“在银行里”。我们无需额外的数学运算即可顺利转移。
《代码》
/*working variables*/
unsigned long lastTime;
double Input, Output, Setpoint;
double ITerm, lastInput;
double kp, ki, kd;
int SampleTime = 1000; //1 sec
void Compute()
unsigned long now = millis();
int timeChange = (now - lastTime);
if(timeChange>=SampleTime)
/*Compute all the working error variables*/
double error = Setpoint - Input;
ITerm += (ki * error);
double dInput = (Input - lastInput);
/*Compute PID Output*/
Output = kp * error + ITerm - kd * dInput;
/*Remember some variables for next time*/
lastInput = Input;
lastTime = now;
void SetTunings(double Kp, double Ki, double Kd)
double SampleTimeInSec = ((double)SampleTime)/1000;
kp = Kp;
ki = Ki * SampleTimeInSec;
kd = Kd / SampleTimeInSec;
void SetSampleTime(int NewSampleTime)
if (NewSampleTime > 0)
double ratio = (double)NewSampleTime
/ (double)SampleTime;
ki *= ratio;
kd /= ratio;
SampleTime = (unsigned long)NewSampleTime;
因此,我们将 errSum 变量替换为复合 ITerm 变量 [第 4 行]。它对 Ki*error 求和,而不仅仅是error [第 15 行]。此外,由于 Ki 现在包含在 ITerm 中,因此它已从主 PID 计算 [第 19 行] 中删除。
结果
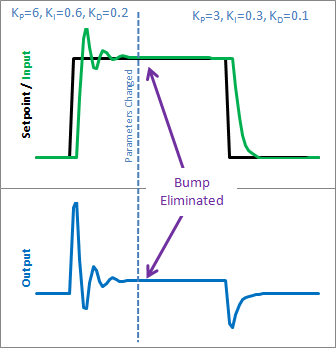
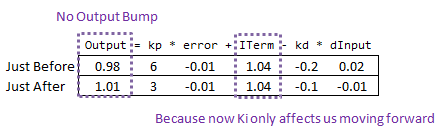
那么这如何解决问题。在更改 ki 之前,它会重新缩放整个error的总和;我们看到的每一个error值。使用此代码,以前的错误保持不变,新的 ki 只会影响将来的事情,这正是我们想要的。
改善初学者的 PID:Reset Windup
(这是关于编写可靠PID算法的更大系列中的修改#4)
问题所在
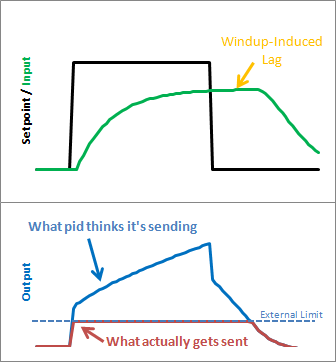
Reset Windup是一个陷阱,可能比其他任何陷阱都需要更多的初学者。当 PID 认为它可以做一些它不能做的事情时,就会发生这种情况。例如,Arduino上的PWM输出接受0-255之间的值。默认情况下,PID 不知道这一点。如果它认为 300-400-500 会起作用,它会尝试这些值,期望得到它需要的东西。由于实际上该值被固定在 255,因此它只会继续尝试越来越高的数字而无处可去。
问题以奇怪的滞后形式显现出来。上面我们可以看到输出“卷绕”在外部限制以上。当设定值下降时,输出必须在低于255线之前逐渐减少。
解决方案 – 步骤 1
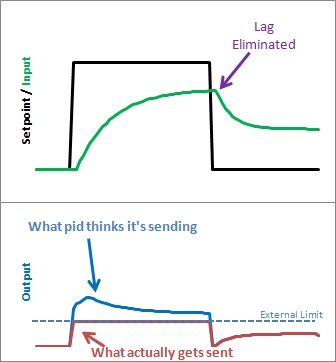
有几种方法可以减轻windup,但我选择的方法如下:告诉PID输出限制是什么。在下面的代码中,您将看到现在有一个 SetOuputLimits 函数。一旦达到任一限制,pid 将停止求和(积分)。它知道没有什么可做的;由于输出不会结束,因此当Setpoint下降到我们可以做某事的范围内时,我们会立即得到响应。
解决方案 – 步骤 2
请注意,在上图中,虽然我们摆脱了windup滞后,但我们并没有一路走来。pid 认为它正在发送的内容和正在发送的内容之间仍然存在差异。为什么?比例项和(在较小程度上)微分项。
即使积分项已被安全控制,P和D仍然加两点,产生高于输出限值的结果。在我看来,这是不可接受的。如果用户调用一个名为“SetOutputLimits”的函数,他们必须假设这意味着“输出将保持在这些值内”。因此,对于第 2 步,我们将其作为有效的假设。除了限制 I 项外,我们还限定输出值,使其保持在我们预期的位置。
(注意:你可能会问为什么我们需要同时限定两者。如果我们无论如何都要做输出,为什么要单独限定积分?如果我们所做的只是限定输出,积分项将逐步增长。虽然输出在升压期间看起来不错,但我们会看到降阶时明显滞后。
《代码》
/*working variables*/
unsigned long lastTime;
double Input, Output, Setpoint;
double ITerm, lastInput;
double kp, ki, kd;
int SampleTime = 1000; //1 sec
double outMin, outMax;
void Compute()
unsigned long now = millis();
int timeChange = (now - lastTime);
if(timeChange>=SampleTime)
/*Compute all the working error variables*/
double error = Setpoint - Input;
ITerm += (ki * error);
if(ITerm> outMax) ITerm= outMax;
else if(ITerm< outMin) ITerm= outMin;
double dInput = (Input - lastInput);
/*Compute PID Output*/
Output = kp * error + ITerm- kd * dInput;
if(Output > outMax) Output = outMax;
else if(Output < outMin) Output = outMin;
/*Remember some variables for next time*/
lastInput = Input;
lastTime = now;
void SetTunings(double Kp, double Ki, double Kd)
double SampleTimeInSec = ((double)SampleTime)/1000;
kp = Kp;
ki = Ki * SampleTimeInSec;
kd = Kd / SampleTimeInSec;
void SetSampleTime(int NewSampleTime)
if (NewSampleTime > 0)
double ratio = (double)NewSampleTime
/ (double)SampleTime;
ki *= ratio;
kd /= ratio;
SampleTime = (unsigned long)NewSampleTime;
void SetOutputLimits(double Min, double Max)
if(Min > Max) return;
outMin = Min;
outMax = Max;
if(Output > outMax) Output = outMax;
else if(Output < outMin) Output = outMin;
if(ITerm> outMax) ITerm= outMax;
else if(ITerm< outMin) ITerm= outMin;
添加了一个新函数,允许用户指定输出限制 [第 52-63 行]。这些限值用于限定I项[17-18]和输出[23-24]
结果
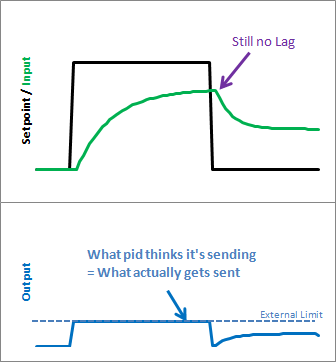
正如我们所看到的,windup被消除了。此外,输出保留在我们想要的位置。这意味着无需对输出进行外部限制。如果您希望它的范围从 23 到 167,则可以将其设置为输出限制。
下一>>
提高初学者的PID:开/关
(这是关于编写可靠PID算法的更大系列中的修改#5)
问题所在
尽管拥有一个PID控制器很好,但有时你并不关心它要说什么。
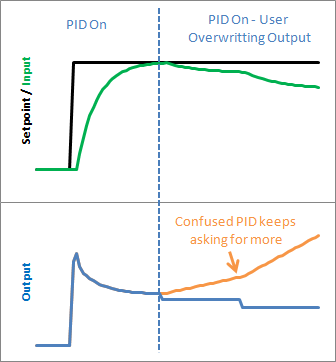
假设在程序中的某个时刻,您希望将输出强制为某个值(例如 0),您当然可以在调用例程中执行此操作:
void loop()
Compute();
Output=0;
这样,无论 PID 说什么,您都只需覆盖其值。然而,这在实践中是一个糟糕的想法。PID会变得非常困惑:“我一直在移动输出,什么也没发生!给什么?!让我再动一下。因此,当您停止覆盖输出并切换回 PID 时,您可能会立即获得输出值的巨大变化。
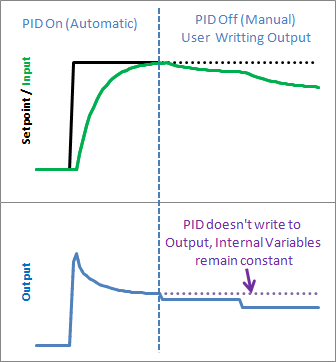
解决方案
这个问题的解决方案是有一种关闭和打开PID的方法。这些状态的常用术语是“手动”(我将手动调整值)和“自动”(PID 将自动调整输出)。让我们看看这是如何在代码中完成的:
《代码》
/*working variables*/
unsigned long lastTime;
double Input, Output, Setpoint;
double ITerm, lastInput;
double kp, ki, kd;
int SampleTime = 1000; //1 sec
double outMin, outMax;
bool inAuto = false;
#define MANUAL 0
#define AUTOMATIC 1
void Compute()
if(!inAuto) return;
unsigned long now = millis();
int timeChange = (now - lastTime);
if(timeChange>=SampleTime)
/*Compute all the working error variables*/
double error = Setpoint - Input;
ITerm+= (ki * error);
if(ITerm> outMax) ITerm= outMax;
else if(ITerm< outMin) ITerm= outMin;
double dInput = (Input - lastInput);
/*Compute PID Output*/
Output = kp * error + ITerm- kd * dInput;
if(Output > outMax) Output = outMax;
else if(Output < outMin) Output = outMin;
/*Remember some variables for next time*/
lastInput = Input;
lastTime = now;
void SetTunings(double Kp, double Ki, double Kd)
double SampleTimeInSec = ((double)SampleTime)/1000;
kp = Kp;
ki = Ki * SampleTimeInSec;
kd = Kd / SampleTimeInSec;
void SetSampleTime(int NewSampleTime)
if (NewSampleTime > 0)
double ratio = (double)NewSampleTime
/ (double)SampleTime;
ki *= ratio;
kd /= ratio;
SampleTime = (unsigned long)NewSampleTime;
void SetOutputLimits(double Min, double Max)
if(Min > Max) return;
outMin = Min;
outMax = Max;
if(Output > outMax) Output = outMax;
else if(Output < outMin) Output = outMin;
if(ITerm> outMax) ITerm= outMax;
else if(ITerm< outMin) ITerm= outMin;
void SetMode(int Mode)
inAuto = (Mode == AUTOMATIC);
一个相当简单的解决方案。如果未处于自动模式,请立即离开计算函数,而不调整输出或任何内部变量。
结果
确实,您可以通过不从调用例程调用 Compute 来实现类似的效果,但此解决方案保留了 PID 的工作原理,这正是我们所需要的。通过将事情保持在内部,我们可以跟踪处于哪种模式,更重要的是,当我们更改模式时,它可以让我们知道。这就引出了下一个问题…
下一>>
改进初学者的 PID:初始化
(这是关于编写可靠PID算法的更大系列中的修改#6)
问题所在
在上一节中,我们实现了关闭和打开PID的功能。我们关闭了它,但现在让我们看看当我们重新打开它时会发生什么:
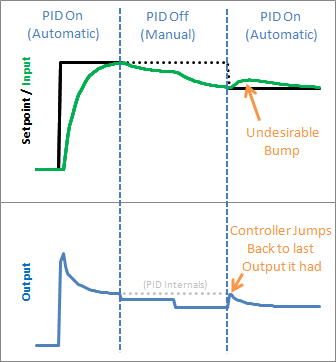
哎呀!PID 跳回到它发送的最后一个输出值,然后从那里开始调整。这会导致我们不希望有的输入凸起。
解决方案
这个很容易修复。由于我们现在知道何时打开(从手动到自动),我们只需要初始化即可平稳过渡。这意味着massaging2个存储的工作变量(ITerm和lastInput)以防止输出跳转。
《代码》
/*working variables*/
unsigned long lastTime;
double Input, Output, Setpoint;
double ITerm, lastInput;
double kp, ki, kd;
int SampleTime = 1000; //1 sec
double outMin, outMax;
bool inAuto = false;
#define MANUAL 0
#define AUTOMATIC 1
void Compute()
if(!inAuto) return;
unsigned long now = millis();
int timeChange = (now - lastTime);
if(timeChange>=SampleTime)
/*Compute all the working error variables*/
double error = Setpoint - Input;
ITerm+= (ki * error);
if(ITerm> outMax) ITerm= outMax;
else if(ITerm< outMin) ITerm= outMin;
double dInput = (Input - lastInput);
/*Compute PID Output*/
Output = kp * error + ITerm- kd * dInput;
if(Output> outMax) Output = outMax;
else if(Output < outMin) Output = outMin;
/*Remember some variables for next time*/
lastInput = Input;
lastTime = now;
void SetTunings(double Kp, double Ki, double Kd)
double SampleTimeInSec = ((double)SampleTime)/1000;
kp = Kp;
ki = Ki * SampleTimeInSec;
kd = Kd / SampleTimeInSec;
void SetSampleTime(int NewSampleTime)
if (NewSampleTime > 0)
double ratio = (double)NewSampleTime
/ (double)SampleTime;
ki *= ratio;
kd /= ratio;
SampleTime = (unsigned long)NewSampleTime;
void SetOutputLimits(double Min, double Max)
if(Min > Max) return;
outMin = Min;
outMax = Max;
if(Output > outMax) Output = outMax;
else if(Output < outMin) Output = outMin;
if(ITerm> outMax) ITerm= outMax;
else if(ITerm< outMin) ITerm= outMin;
void SetMode(int Mode)
bool newAuto = (Mode == AUTOMATIC);
if(newAuto && !inAuto)
/*we just went from manual to auto*/
Initialize();
inAuto = newAuto;
void Initialize()
lastInput = Input;
ITerm = Output;
if(ITerm> outMax) ITerm= outMax;
else if(ITerm< outMin) ITerm= outMin;
我们修改了 SetMode(...) 以检测从手动到自动的转换,并添加了初始化函数。它设置 ITerm=Output 来处理积分项,lastInput = Input以防止导数出现峰值。比例项不依赖于过去的任何信息,因此不需要任何初始化。
结果
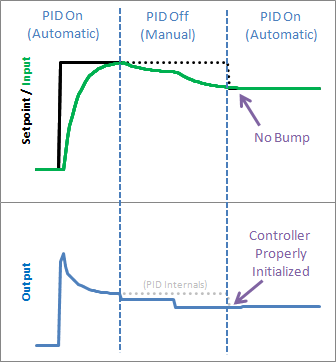
我们从上图中看到,正确的初始化会导致从手动到自动的无颠簸转移:这正是我们所追求的。
下一>>
更新:为什么不是 ITerm=0?
我最近收到很多问题,问为什么我不在初始化时设置 ITerm=0。作为答案,我要求您考虑以下场景:pid 是手动的,用户已将输出设置为 50。一段时间后,该过程稳定到输入 75.2。用户设定值为 75.2 并打开 pid。应该怎么做?
我认为切换到自动后,输出值应保持在 50。由于 P 和 D 项将为零,因此发生这种情况的唯一方法是将 ITerm 初始化为输出值。
如果您处于需要输出初始化为零的情况,则无需更改上面的代码。只需在调用例程中设置 Output=0,然后将 PID 从手动转换为自动。
提高初学者的PID:方向
(这是关于编写固体PID算法的更大系列中的最后一次修改)
问题所在
PID连接的过程分为两组:直接作用和反向作用。到目前为止,我展示的所有例子都是直接行动。也就是说,输出的增加会导致输入的增加。对于反向作用过程,情况正好相反。例如,在冰箱中,冷却的增加会导致温度下降。为了使初学者 PID 使用反向过程,kp、ki 和 kd 的符号都必须为负数。
这本身不是问题,但用户必须选择正确的符号,并确保所有参数都具有相同的符号。
解决方案
为了使过程更简单一些,我要求 kp、ki 和 kd 都>=0。如果用户连接到反向进程,则使用SetControllerDirection 函数单独指定。这确保了所有参数都具有相同的符号,并希望使事情更加直观。
《代码》
/*working variables*/
unsigned long lastTime;
double Input, Output, Setpoint;
double ITerm, lastInput;
double kp, ki, kd;
int SampleTime = 1000; //1 sec
double outMin, outMax;
bool inAuto = false;
#define MANUAL 0
#define AUTOMATIC 1
#define DIRECT 0
#define REVERSE 1
int controllerDirection = DIRECT;
void Compute()
if(!inAuto) return;
unsigned long now = millis();
int timeChange = (now - lastTime);
if(timeChange>=SampleTime)
/*Compute all the working error variables*/
double error = Setpoint - Input;
ITerm+= (ki * error);
if(ITerm > outMax) ITerm= outMax;
else if(ITerm < outMin) ITerm= outMin;
double dInput = (Input - lastInput);
/*Compute PID Output*/
Output = kp * error + ITerm- kd * dInput;
if(Output > outMax) Output = outMax;
else if(Output < outMin) Output = outMin;
/*Remember some variables for next time*/
lastInput = Input;
lastTime = now;
void SetTunings(double Kp, double Ki, double Kd)
if (Kp<0 || Ki<0|| Kd<0) return;
double SampleTimeInSec = ((double)SampleTime)/1000;
kp = Kp;
ki = Ki * SampleTimeInSec;
kd = Kd / SampleTimeInSec;
if(controllerDirection ==REVERSE)
kp = (0 - kp);
ki = (0 - ki);
kd = (0 - kd);
void SetSampleTime(int NewSampleTime)
if (NewSampleTime > 0)
double ratio = (double)NewSampleTime
/ (double)SampleTime;
ki *= ratio;
kd /= ratio;
SampleTime = (unsigned long)NewSampleTime;
void SetOutputLimits(double Min, double Max)
if(Min > Max) return;
outMin = Min;
outMax = Max;
if(Output > outMax) Output = outMax;
else if(Output < outMin) Output = outMin;
if(ITerm > outMax) ITerm= outMax;
else if(ITerm < outMin) ITerm= outMin;
void SetMode(int Mode)
bool newAuto = (Mode == AUTOMATIC);
if(newAuto == !inAuto)
/*we just went from manual to auto*/
Initialize();
inAuto = newAuto;
void Initialize()
lastInput = Input;
ITerm = Output;
if(ITerm > outMax) ITerm= outMax;
else if(ITerm < outMin) ITerm= outMin;
void SetControllerDirection(int Direction)
controllerDirection = Direction;
PID 完成
这就结束了。我们已经把“初学者的PID”变成了我目前知道如何制作的最强大的控制器。对于那些正在寻找PID库详细解释的读者,我希望你得到你想要的。对于那些编写自己的PID的人,我希望你们能够收集一些想法,从而节省一些周期。
最后两点:
- 如果本系列中的某些内容看起来有问题,请告诉我。我可能错过了一些东西,或者可能只需要在我的解释中更清楚。无论哪种方式,我都想知道。
- 这只是一个基本的PID。为了简单起见,我故意省略了许多其他问题。我的头顶:前馈,重置回扣,整数数学,不同的pid形式,使用速度而不是位置。如果有兴趣让我探索这些主题,请告诉我。
嵌入式STM32利用arm-dsp库进行PID调节控制
在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称 PID 控制,又称 PID调节。其原理介绍教科书以及网上已经有大量资料,本文着重介绍在嵌入式设备中,如何快速上手进行PID控制,并通过简单的单片机外设进行验证。
一、实验简介
1.原理
我们知道,可以通过调节PWM的占空比来起到调节等效电压的效果。比如U=D*Ud,其中U为输出的等效电压,D为占空比,Ud为单极性PWM的峰值电压,这常用在电机控制中。
当要维持输出电压U为某一确定值Us时,往往要形成回路以准确得控制U的大小,这就要用到ADC来回采电压Us,利用某种控制手段使得输出的电压U与确定值Us误差维持在一定范围内。其中,这种控制方法最为常用的就是PID控制。
以经典反馈控制回路为例:
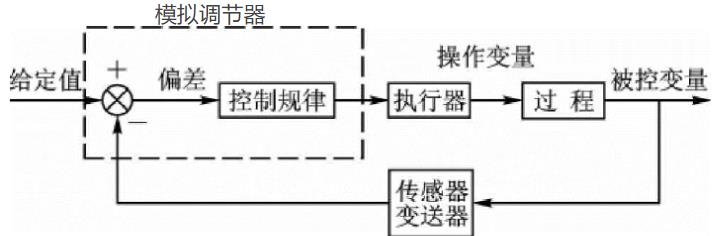
其中给定值即为Us;控制规律为PID;执行器即为占空比的调整;过程即为PWM输出;被控变量即为U;传感器即为ADC。本系统采用PID控制时,可作以下描述:PWM输出的电压值U被ADC采样后,回环送入调节器与给定值Us相比较,获得一个偏差送入PID调节器,通过PID来控制PWM占空比的大小从而起到调节电压U的效果,最终使得电压U与给定值Us之间的误差稳定在某个设定的范围阈值之内。
2.所用外设
我们利用一个单片机核心板即可进行上述的PID调节PWM的实验。
其中,PWM由定时器输出;通过片内ADC进行电压回采、处理;通过arm-dsp库进行PID调节。
综上,本实验用到以下外设:
1.定时器的PWM输出;
2.定时器触发的ADC采样;
3.ADC采样的DMA传输;
二、代码
依旧用到了STM32CubeMX来进行驱动代码的生成。
这里规定了几个重要的参数:
1.STM32F407,配置主频160MHz;
1.PWM载波50Hz;
2.ADC采样率4000Hz;
1.PWM输出配置
使用TIMER3来输出PWM,160MHz主频下,TIMER3的时钟为80MHz,将在这个基础上分频到50Hz;
首先配置TIM3的PWM输出通道:
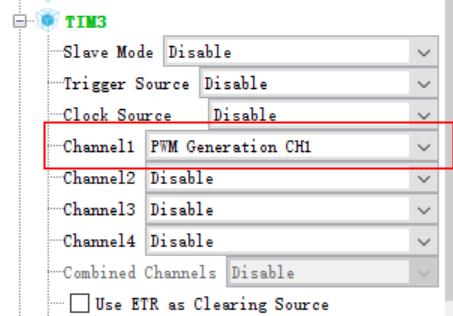
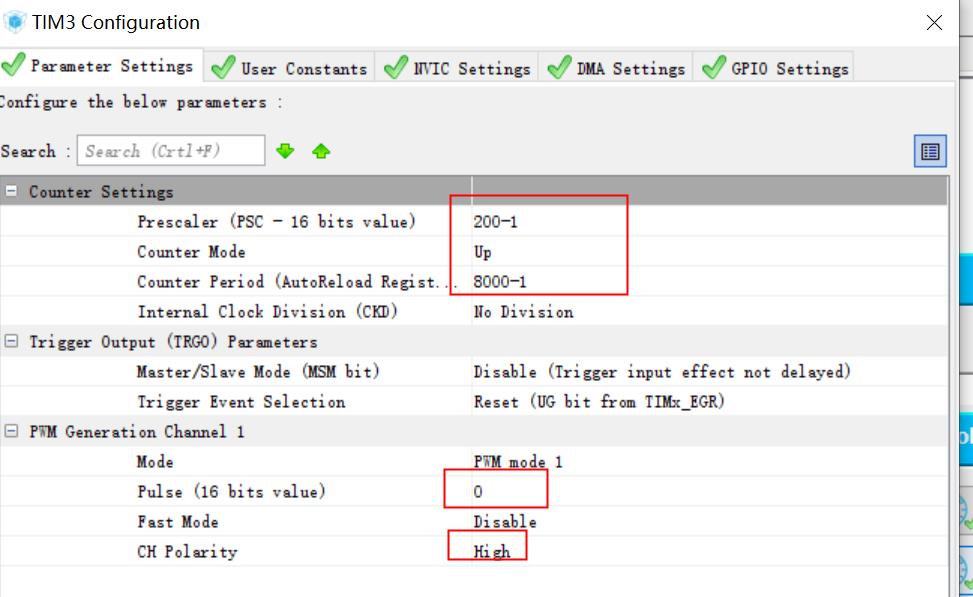
然后分频到50Hz,同时设置PWM极性高,Pulse随便设置即可,为了最大程度体现PID的效果,我们初始设置为0,在PWM极性高时,Pulse为0意味着PWM通道总是输出低,即PWM初始的等效电压为0.
2.定时器触发的DMA传输的ADC
这个完全参考我之前的博客即可,【嵌入式】STM32F4的ADC采样——多通道、DMA、定时器触发,唯一的区别在于此处只用了一通道,更简单了。
生成代码后,硬件上将PWM通道直接怼到ADC1的0通道即可。
3.主体代码
#include "main.h"
#include "stm32f4xx_hal.h"
#include "adc.h"
#include "dma.h"
#include "tim.h"
#include "gpio.h"
#include "arm_math.h"
void SystemClock_Config(void);
#define BUF_LEN 400 //采样数组长度
#define PWM_PERIOD_CCR1 8000 //PWM周期-计数值
#define DES_VOL 1.0 //目标电压
#define ERR_LIMIT 0.05 //误差限制
typedef struct{
arm_pid_instance_f32 S;
float out;
}PidCtrlTypedef; //pidt调节结构体
volatile uint8_t dma_cpl_flag = 0; //dma传输完成标志
uint16_t adc_raw[BUF_LEN] = {0}; //adc原始采样值
uint16_t adc_raw_copy[BUF_LEN] = {0}; //adc原始采样值备份
float cur_vol = 0; //当前电压
PidCtrlTypedef pidCtrl; //pid调节实例
/* ADC-DMA全传输完成回调 */
void HAL_ADC_ConvCpltCallback(ADC_HandleTypeDef *hadc)
{
UNUSED(hadc);
memcpy((void *)adc_raw_copy,(void *)adc_raw,sizeof(adc_raw));
dma_cpl_flag = 1;
}
/* 根据原始采样值计算PWM等效电压值 */
float calVol()
{
int i;
float res;
float sum = 0;
float tempVal;
for(i = 0;i < BUF_LEN; i++)
{
tempVal = adc_raw_copy[i] * 3.3 / 4095;
sum += tempVal;
}
res = sum / BUF_LEN;
cur_vol = res;
return res;
}
/* PID初始化 */
void pidInit()
{
pidCtrl.S.Kp = 0.1;
pidCtrl.S.Ki=0.1;
pidCtrl.S.Kd = 0.1;
arm_pid_init_f32(&pidCtrl.S,1);
pidCtrl.out = 0;
}
/* PID执行 */
static void pidExecu(float vol)
{
float pidErr;
pidErr = DES_VOL - vol;
//误差不在允许范围内
if(fabs(pidErr) > ERR_LIMIT)
{
pidCtrl.out = arm_pid_f32(&pidCtrl.S,pidErr);
// vol pidCtrl.out
// —————————— = ————————————
// 当前占空比 调节后占空比
htim3.Instance->CCR1 = (uint32_t)(pidCtrl.out * (htim3.Instance->CCR1 + 1) / vol);
}
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
*
* @retval None
*/
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_DMA_Init();
MX_ADC1_Init();
MX_TIM2_Init();
MX_TIM3_Init();
//pid初始化
pidInit();
//开启AD转换时钟
HAL_TIM_Base_Start(&htim2);
//开启PWM输出
HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_1);
//开启ADC-DMA传输
HAL_ADC_Start_DMA(&hadc1, (uint32_t *)adc_raw, BUF_LEN);
while (1)
{
if(dma_cpl_flag == 1)
{
dma_cpl_flag = 0;
pidExecu(calVol());
}
}
}
以上代码即为主体逻辑代码。流程如下:
1.外设初始化;
2.PID初始化;
3.开启AD转换时钟;
4.开启PWM输出;
5.开启ADC-DMA采样;
6.每次DMA传输完成中断后,进行PWM有效值计算、PID控制、PWM占空比调节。
同时,程序中有几个关键点:
1.设置DMA的长度为400,即采样率4000Hz时、PWM载波50Hz时,采样100ms进一次DMA传输完成中断,共采了5周期的PWM,从而能直接对400个采样点取平均,得到PWM的有效值。即采样长度一定要为PWM载波的整数倍,且采样率要远大于PWM载波频率;
2.利用arm-dsp库进行PID控制要在工程中加入arm-dsp的lib库,具体方法请参考博客【嵌入式】利用arm-DSP库进行FFT计算,获得信号的频谱、幅值及相位(上)的二-1小节;
3.arm_pid_f32函数声明如下:
static __INLINE float32_t arm_pid_f32(
arm_pid_instance_f32 * S,
float32_t in)
其中S为arm_pid_instance_f32 实例指针,在arm_pid_init_f32函数中实例化。要注意的是变量in,这个in是给定值与反馈值的误差,其在arm_math.h中做了阐述:
The PID controller calculates an "error" value as the difference between
* the measured output and the reference input.
* The controller attempts to minimize the error by adjusting the process control inputs.
* The proportional value determines the reaction to the current error,
* the integral value determines the reaction based on the sum of recent errors,
* and the derivative value determines the reaction based on the rate at which the error has been changing.
了解了这几点,再配合上边注释详细的程序,即可理解实验过程以及PID调节的使用方法。具体Kp、Ki、Kd参数的调节,还需要根据不同场景来进行耐心调节。
三、实验结果
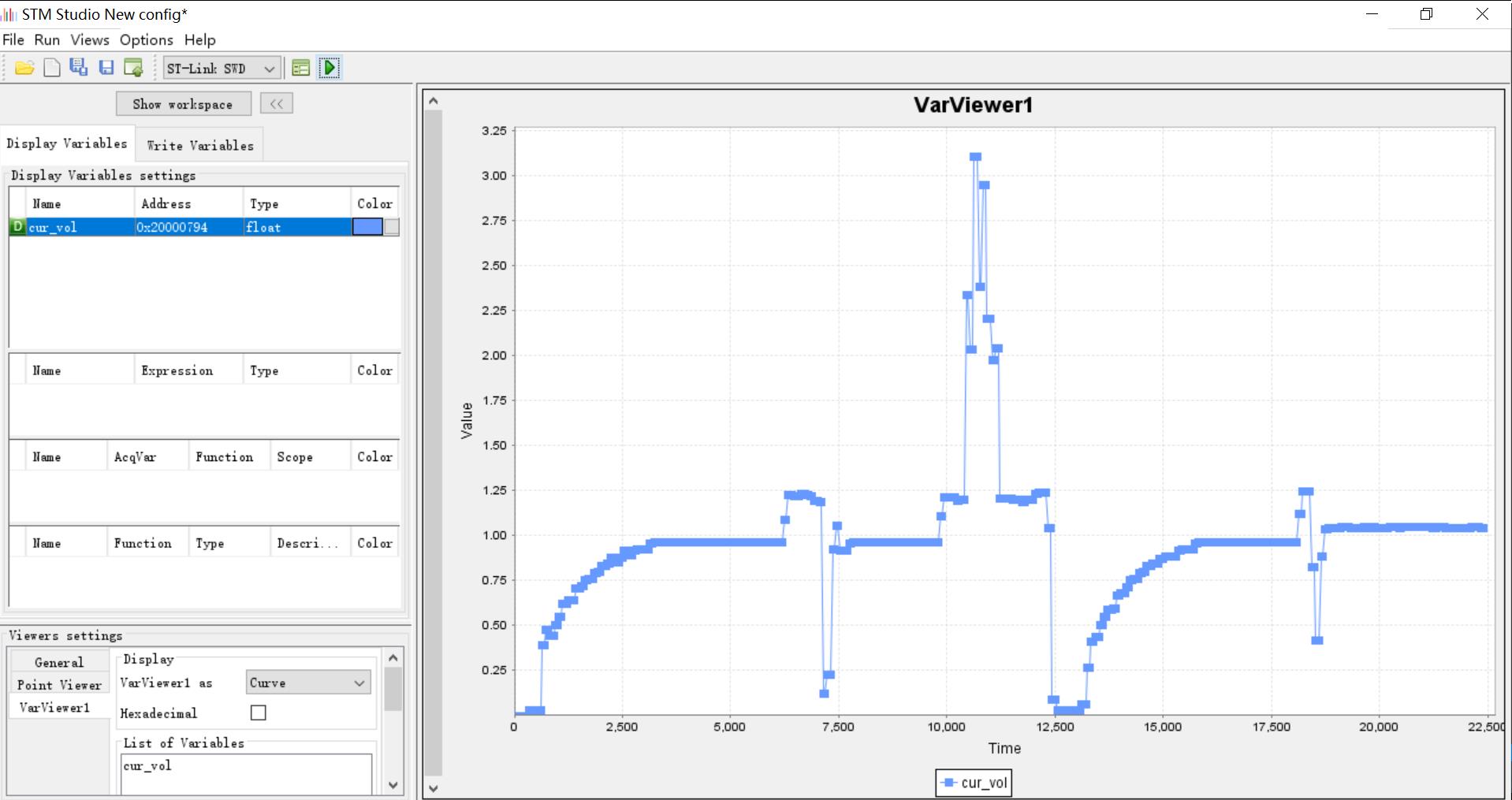
程序中定义了变量cur_vol以存储当前采到的PWM有效值,为了直观的体现PID对PWM的调节过程,使用STM32Studio进行变量实时调试,具体使用方法请自行百度。
可以看到,在设置期望值1V、初始PWM输出为0V、最大允许误差0.05V时,PID控制器可在2秒内平滑稳定得将输出值调节到误差0.05V之内。且人为地多次随机插拔采样通道使得采样值扰动、PWM失稳后,PID控制器总能再次平稳得将输出值再次调节到1V±0.05V之内。
这就体现了PID控制的实用价值所在,至于调节速度、震荡速度、允许误差等,可以通过实际工程需求进行整定、调整。
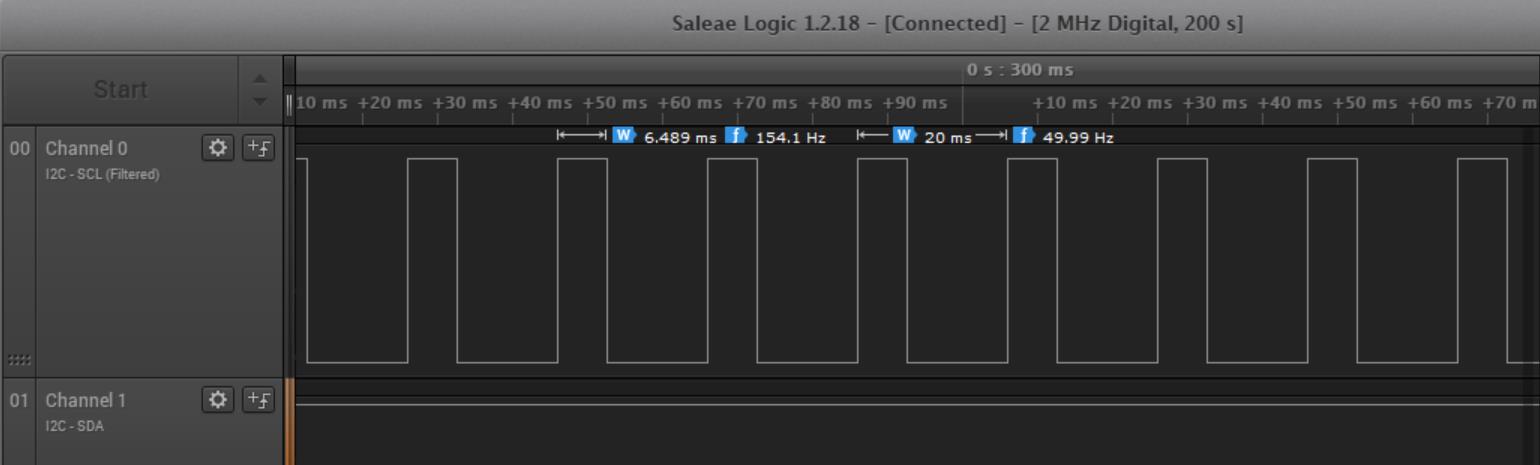
最后,贴一张调节稳定后的PWM实测波形,可以看到其占空比约为6.489/20 = 32.445%,以AD基准电压3.3V来算,其输出电压为3.3*0.32445 = 1.070685V,这个值由于逻辑分析仪的占空比采样误差、3.3V基准误差的存在,使得与1V有一定的偏差。同时程序里也规定了0.95~1.05V范围内是期望范围。
综上,PID调节起到了应有的作用。
以上是关于Arduino PID库简介的主要内容,如果未能解决你的问题,请参考以下文章