RAWRGB和YUV格式
Posted 菜鸡UP
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了RAWRGB和YUV格式相关的知识,希望对你有一定的参考价值。
RAW
RAW数据是图像感应器(CMOS or CCD)将捕捉到的光源信号转化为数字信号之后的原始数据,它含有图像原始的颜色信息等等。
-
Bayer
RAW 数据格式一般采用的是 Bayer 排列方式,sensor上每个像素只采集特定颜色的光的强度,所以sensor的每个像素只能记录R或G或B的信息,所以RAW数据里表示了sensor接受到的各种光的强度。鉴于人眼对绿色波段的色彩比较敏感,所以绿色分量的比重最大,Bayer 中R\\G\\B分量的成分为 。
。
一般BAYER格式分为GBRG、GRBG、BGGR、RGGB四种模式。因为采用Bayer排列方式的这种RAW图,看起来像打了马赛克一样,所以也经常称其为马赛克(mosaic)图像。比如,RGGB的排列方式如下图。

-
4cell
RAW数据也可以用4 cell结构来表达,但其实4 cell仍然是采用的Bayer结构,只是4 cell对具体像素的排列做了调整,如下图所示,它使用4个颜色相同的像素合成一个像素,其整体上仍然是符合Bayer结构的,4 cell也叫Quad-Bayer

有了Bayer格式的图之后,为什么还会出现4 cell呢? 是因为高像素可以带来高分辨率的画质,大像素能够带来暗态高感度低噪声的画质,但是在模组尺寸一定的基础上,高像素和大像素之间会是互相矛盾的,在这样一个背景下,4 cell就出现了,4 cell的出现就兼顾了高像素和大像素这两者的优点
1. 正常环境拍摄
在正常拍照的情况下,由于光线充足,此时采用高分辨率输出即可,4 cell结构经过Remosaic算法转换,将这些颜色重新进行排列组合了之后,就变成了前面所说的Bayer结构,图像大小就是实际大小(full size),这样就实现了高像素的拍摄。Remosaic可以分为硬件和软件两类,硬件模式可以通过sensor实时输出Bayer模式的图像,软件模式则需要通过调用专用的库对图像进行调整。

2. 暗环镜拍摄
在暗环镜下,把4个相同颜色的小像素作为一个整体来看的话,这个像素会有更大的感光面积,随之会带来更好的感光效果,如下图所示,可以看到,4个小像素合成一个大像素之后会变成经典的拜耳阵列结构。由于每4个像素被合并成1个像素,此时图像的size缩小为原来的1/4。

RGB
根据三基色原理,自然界中的任何一种颜色都可由不同比例的红色、绿色和蓝色组合得到。根据这种原理来表示彩色图像的方法就是RGB彩色空间,即彩色图像的每个pixel都是由一组(R,G,B)数值来表示的,这三个分量别取不同的值,就会呈现出不同的颜色。
所以RGB图像和前面的Bayer排列方式的RAW图不同,后者的每个pixel只含有某单种颜色的强度,而RGB图一个Pixel包含了3三种颜色的强度。 在camera当中,很多Sensor出来的是采用Bayer排列方式的RAW图,而有些ISP 模块或者算法需要处理的是RGB的图,这时就需要将Bayer排列方式的图转换成RGB了。
Demosaic
前面提过Bayer排列方式的图,看起来就像是mosaic一样,而Demosaic的目的,就是在Bayer数据基础上,恢复出每个pixel完整的RGB数据,得到RGB的图。
那么具体怎么做Demosaic呢?简单来说,就是通过插值算法,把拜耳阵列中的GRRB分别插值为4个RGB,从而得到一幅看起来正常的图像。
常见的RGB格式
- RGB565 :占2个字节,分别是R-5bit,G-6bit,B-5bit
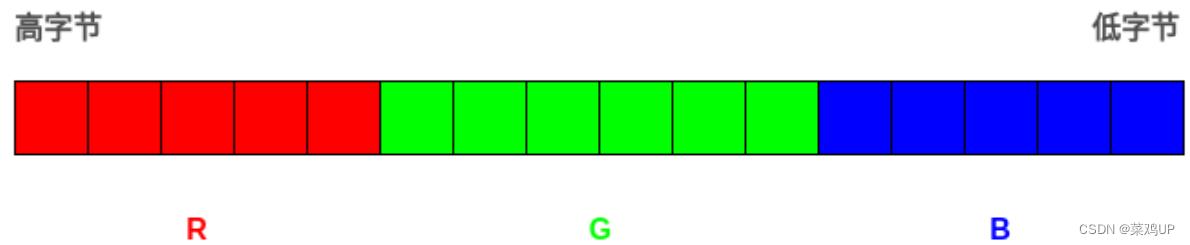
- RGB555 :每个pixel占2个字节,分别是R-5bit,G-5bit,B-5bit,即RGB分量都使用5位(最高位不用)

- RGB888 :每个pixel占3个字节,分别是R-8bit,G-8bit,B-8bit ,其实这就是RGB24

YUV
YUV也是一种颜色表示模型,它将图像亮度分量和色度分量分开来表示。YUV分为三个分量,Y表示亮度(Luminance或Luma),也就是灰度值;U和V 则表示的是色度(Chrominance或Chroma),它描述了图像的色调以及饱和度,用于指定像素的颜色。,YUV这样表达方式很好地解决了彩色电视机与黑白电视的兼容问题,因为如果只有Y分量,没有UV分量一样可以显示完整的图像,只不过图像是黑白的,再加上UV就是彩色图像了。
YUV通常用于电视机模拟信号的色彩,而YCbCr 是一种用数字信号的色彩表达方法,它是世界数字组织视频标准研制过程中作为ITU-R BT1601 建议的一部分, 其实是YUV经过缩放和偏移的翻版,也是来源于YUV模型,Y和YUV的Y含义一样,都是指亮度分量,Cb指蓝色色度分量,而Cr指红色色度分量,YCbCr 应用在数字视频方面,视频编码中常提到的YUV444、YUV420都是基于YCbCr颜色空间的下采样方式。现在,一般人们所讲的YUV大多就是指YCbCr,每一个Pixel由一组(Y,U,V)数值来表示。
另外,通常人眼对亮度会比色彩更加敏感,所以YUV在压缩时,可以适当地多压缩一些U\\V分量,从这一点来说,在保证图像质量降低不明显的前提下,YUV相对RGB更适合存储和传输。
常见的YUV格式
YUV的三个分量在存储的时候,通常以它们形成的平面(plane)来区分
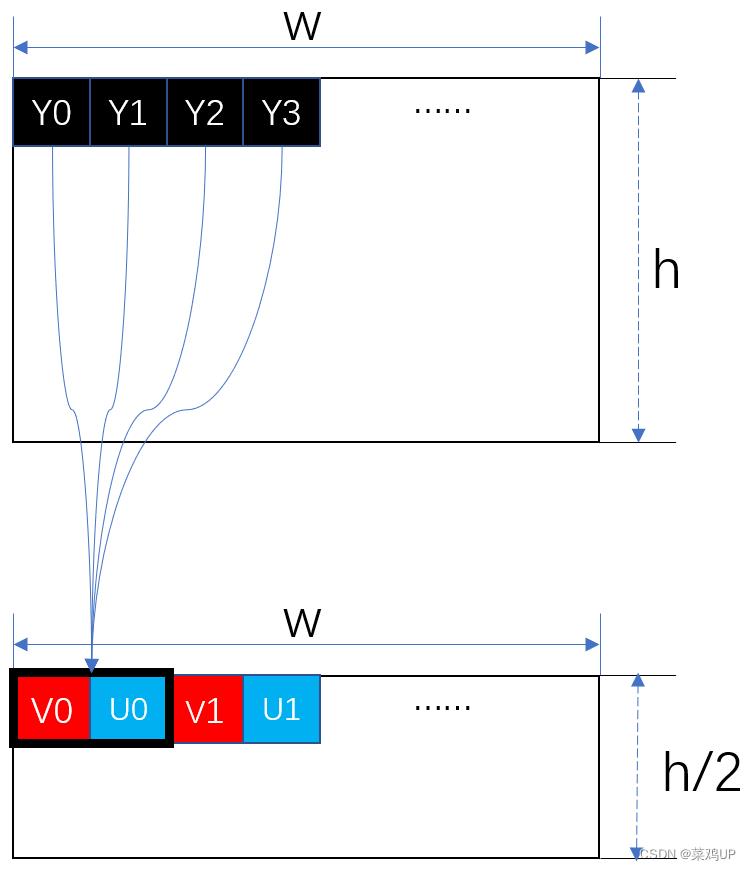
- NV21
NV21是一种2 plane的YUV格式,分为Y plane和UV plane,其中4个Y分量对应到同一组UV分量,如下图所示。所以可见对于一幅 大小的NV21 format图像,会占据
大小的NV21 format图像,会占据 个字节大小的空间。
个字节大小的空间。

- NV12
NV12和NV21相比,差别只在于UVpalne里,两者UV的交替顺序是反的,NV12是VU交替。其余的和NV21是一样的,也是4个Y分量对应同一组UV分量;大小的图像,占据个字节大小的空间。
- YV12
YV12是3 plane的YUV格式,Y\\U\\V各自一个plane,如下图所示。所以对于一幅大小的YV12 format图像,也是占据个字节大小的空间。

RGB与YUV之间的转换
在图像处理过程中,经常会遇到YCbCr与RGB之间的转换,RGB转换成YCbCr的转换公式可以简单表达如下:
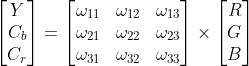
同样,YCbCr转换成RGB,也可以通过一个转换矩阵来转换。
这个公式里面所使用的转换矩阵,不同的ColorSpace是不相同的,目前比较常见的colorSpace有BT601、BT709和BT2020,它们对应的矩阵是长什么样子的,这个网上也有很多的介绍,比如:MATLAB:RGB转BT601、BT709协议中各种YUV格式的转换函数_llljjlj的博客-CSDN博客。
有时,YCbCr转换RGB,和RGB转换YCbCr之间的转换矩阵由于没有成对的匹配上,导致了效果异常,所以要注意相互转换时所使用的矩阵要匹配。
摄像头相关术语
1. 常见图像格式
摄像头的数据格式通常有RAWRGB、YUV两种。YUV常见的有三种即YUV444,YUV422和YUV420。ADAS通常对色彩考虑不多,YUV420足够,除车载外一般多采用YUV422。
1.1RGB格式
传统的红绿蓝格式,比如RGB565,RGB888,其16-bit数据格式为5-bit R + 6-bit G + 5-bit B,G多一位,原因是人眼对绿色比较敏感。
1.2YUV格式
luma (Y) + chroma (UV) 格式。YUV是指亮度参量和色度参量分开表示的像素格式,而这样分开的好处就是不但可以避免相互干扰,还可以降低色度的采样率而不会对图像质量影响太大。YUV是一个比较笼统地说法,针对它的具体排列方式,可以分为很多种具体的格式。
色度(UV)定义了颜色的两个方面─色调与饱和度,分别用CB和CR表示。其中,Cr反映了RGB输入信号红色部分与RGB信号亮度值之间的差异,而Cb反映的是RGB输入信号蓝色部分与RGB信号亮度值之间的差异。主要的采样格式有YCbCr 4:2:0、YCbCr 4:2:2、YCbCr 4:1:1和 YCbCr 4:4:4。
1.3RAW data格式
RAW图像就是CMOS或者CCD图像感应器将捕捉到的光源信号转化为数字信号的原始数据。RAW文件是一种记录了数码相机传感器的原始信息,同时记录了由相机拍摄所产生的一些元数据(Metadata,如ISO的设置、快门速度、光圈值、白平衡等)的文件。
RAW是未经处理、也未经压缩的格式,可以把RAW概念化为“原始图像编码数据”或更形象的称为“数字底片”。sensor的每一像素对应一个彩色滤光片,滤光片按Bayer pattern分布。将每一个像素的数据直接输出,即RAW RGB data。
2. 常见的摄像头传感器类型
主要有两种:一种是CCD传感器(Chagre Couled Device),即电荷耦合器,另一种是CMOS传感器(Complementary Metal-Oxide Semiconductor)即互补性金属氧化物半导体。
CCD的优势在于成像质量好,但是制造工艺复杂,成本高昂,且耗电高,在相同分辨率下,CMOS价格比CCD便宜,但图像质量相比CCD来说要低一些。CMOS影像传感器相对CCD具有耗电低的优势,加上随着工艺技术的进步,CMOS的画质水平也不断地在提高,所以目前市面上的手机摄像头都采用CMOS传感器。
3. 相关技术指标
3.1图像解析度/分辨率(Resolution)
SXGA(1280 x1024)又称130万像素
XGA(1024 x768)又称80万像素
SVGA(800 x600)又称50万像素
VGA(640x480)又称30万像素(35万是指648X488)
CIF(352x288) 又称10万像素
SIF/QVGA(320x240)
QCIF(176x144)
QSIF/QQVGA(160x120)3.2彩色深度(色彩位数)
256色灰阶,有256种灰色(包括黑白)。
15或16位彩色(高彩色):65,536种颜色。
24位彩色(真彩色):每种原色都有256个层次,它们的组合便有256*256*256种颜色。
32位彩色:除了24位彩色的颜色外,额外的8位是储存重叠图层的图形资料(alpha频道)。3.3光学变焦和数码变焦
光学变焦: 通过镜头的调整,拉近拉远所要拍摄的对象,保持像素不变和画质基本不变,却可以拍到自己理想的物像。
数码变焦:其实没有什么变焦,只是从原图片中截取出来放大,你从液晶屏幕上看到变大了,实际上画质并没有本质提高,而像素比你相机能拍摄的最大像素降低了, 画质上说基本是鸡肋吧,但是可以提供一些方便。
3.4图像压缩方式
JPEG/M-JPEG
H.261/H.263
MPEG
H.264 3.5图像噪音
指的是图像中的杂点干扰,表现为图像中有固定的彩色杂点。
3.6自动白平衡处理技术(auto White Balance)
简单来说就是:摄像机对白色物体的还原。相关概念:色温。
3.7视角
与人的眼睛成像是相成原理,简单说就是成像范围。
3.8自动对焦
自动对焦可以分成两大类:一类是基于镜头与被拍摄目标之间距离测量的测距自动对焦,另一类是基于对焦屏上成像清晰的聚焦检测自动对焦(清晰度算法)。
注:变焦就是把远处的物体拉近。对焦是让图像清晰。
3.9自动曝光和Gamma
就是光圈和快门的组合。光圈,快门速度,ISO。Gamma即人眼对亮度的响应曲线。
4. 逐行扫描和隔行扫描
隔行扫描(Interlaced)和逐行扫描(Progressive)都是在显示设备表示运动图像的方法,隔行扫描方式是每一帧被分割为两场画面交替显示,逐行扫描方式是将每帧的所有画面同时显示。
隔行扫描就是每一帧被分割为两场,每一场包含了一帧中所有的奇数扫描行或者偶数扫描行,通常是先扫描奇数行得到第一场,然后扫描偶数行得到第二场。由于视觉暂留效应,人眼将会看到平滑的运动而不是闪动的半帧半帧的图像。
隔行扫描的时候,由于只有第一场和第二场都显示出来的时候才能显示完整画面,如果第二场和第三场显示的画面不同,就会同时出现不同的画面,就会出现交错画面的情况,所以会出现模糊和闪烁的情况。
逐行扫描每次显示整个扫描帧,如果逐行扫描的帧率和隔行扫描的场率相同,人眼将看到比隔行扫描更平滑的图像,相对于隔行扫描来说闪烁较小。但在扫描频率只有30hz的情况下,电子枪逐行扫描有点“来不及”,传统技术使得电视机来不及一次将五六百行的内容都刷新一遍,电子枪扫描到屏幕下面时,上面的内容已经衰减了,闪烁严重,还不如隔行的效果。
以上是关于RAWRGB和YUV格式的主要内容,如果未能解决你的问题,请参考以下文章