DDPM(Denoising Diffusion Probabilistic Models)
Posted 鱼只
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了DDPM(Denoising Diffusion Probabilistic Models)相关的知识,希望对你有一定的参考价值。
扩散模型包含两个过程:
①扩散过程:从左到右的过程(Data→Noise),表示对图片逐步增加噪声。
②逆扩散过程:从右到左的过程(Noise→Data),表示从高斯噪声中逐步去噪,复原出原图。

扩散过程
扩散过程可以表示为 ,其中x为原图,z为添加了T次噪声后得到的图像。添加噪声的过程
,其中x为原图,z为添加了T次噪声后得到的图像。添加噪声的过程



因 为正太分布,所以
为正太分布,所以 部分加起来也为正太分布,又因为
部分加起来也为正太分布,又因为 ,所以有
,所以有

在论文中设置 ,T越大,
,T越大, 越大,噪声的权重越大
越大,噪声的权重越大
在设置好响应的 之后,前向扩散的过程也就确定了
之后,前向扩散的过程也就确定了
逆扩散过程
根据式①可得 ,设去噪模型为u(x),因此考虑将模型设计为
,设去噪模型为u(x),因此考虑将模型设计为
 实际处理时每个去噪重构模型的参数是一样的,t 是转换成位置编码后(详情请参考https://kexue.fm/archives/8231),直接加到残差模块上去的
实际处理时每个去噪重构模型的参数是一样的,t 是转换成位置编码后(详情请参考https://kexue.fm/archives/8231),直接加到残差模块上去的
损失函数为
根据公式①和②有
损失函数表示为
计算上述损失函数需要采样 4 个随机变量:
由于要采样的随机变量越多,就越难对损失函数做准确的估计,反过来说就是每次对损失函数进行估计的波动 (方差) 过大了,通过一个积分技巧来将 合并成单个正态随机变量,从而缓解一下方差大的问题。
合并成单个正态随机变量,从而缓解一下方差大的问题。
由于正态分布的叠加性

接下来,我们反过来将用ε,ω重新表示出来

代入公式③得
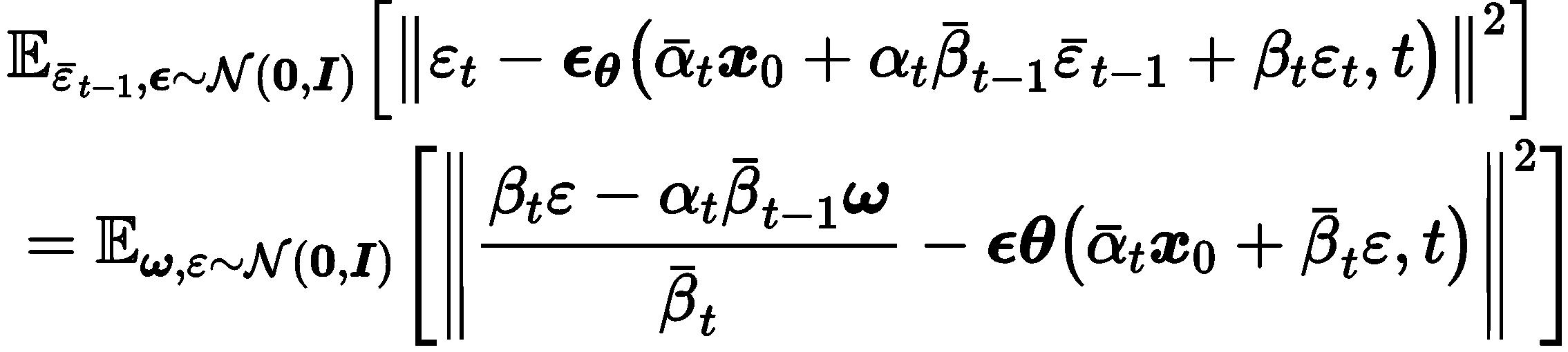
现在损失函数关于ωω只是二次的,所以我们可以展开然后将它的期望直接算出来,结果是

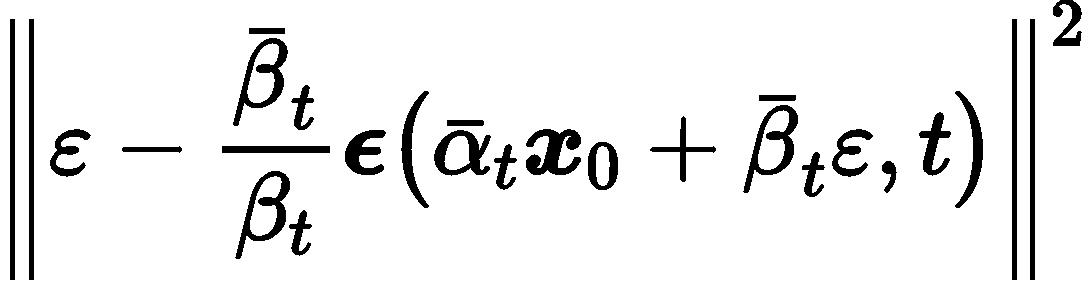
再次省掉常数和损失函数的权重,我们得到DDPM最终所用的损失函数
原论文中的 实际上就是本文的
实际上就是本文的 ,所以大家的结果是完全一样的。
,所以大家的结果是完全一样的。
参考:
从DDPM到DDIM:深入解读《Denoising Diffusion Implicit Models》
前言:DDIM发表在ICRL2021上,是DDPM重要的改进之一,能显著提高DDPM的样本质量、减少采样时间,并且已经被广泛应用到现在的Diffusion Models上。这篇博客和大家一起详细解读一下DDIM,认识这一伟大的模型。
目录
以上是关于DDPM(Denoising Diffusion Probabilistic Models)的主要内容,如果未能解决你的问题,请参考以下文章