3D视觉——1.人体姿态估计(Pose Estimation)入门——使用MediaPipe含单帧(Signel Frame)与实时视频(Real-Time Video)
Posted 游客26024
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了3D视觉——1.人体姿态估计(Pose Estimation)入门——使用MediaPipe含单帧(Signel Frame)与实时视频(Real-Time Video)相关的知识,希望对你有一定的参考价值。
使用MediaPipe工具包进行开发
什么是MediaPipe?
MediaPipe是一款由Google Research 开发并开源的多媒体机器学习模型应用框架,用于处理视频、音频等时间序列数据。这个跨平台架构使用于桌面/服务器、android、ios和嵌入式设备等。
我们使用MeidaPipe下的Solutions(方案特定的模型),共有16个Solutions:
- 人脸检测
- Fase Mesh (人脸上打了特别多网格)
- 虹膜(人眼)
- 手
- 姿态(!这章博客需要用到的)
- 人体
- 人物分割
- 头发分割
- 目标检测
- Box Tracking
- 实例动态跟踪
- 3D目标检测
- 特征匹配
- AutoFlip
- MediaSequence
- YouTube-8M
人体姿态估计代码
重点代码讲解
1.solutions.pose
import mediapipe as mp
mp_pose = mp.solutions.posemediapipe姿态估计模块(.solutions.pose),将人体各个部位分成33个点(0-32)如下图1.
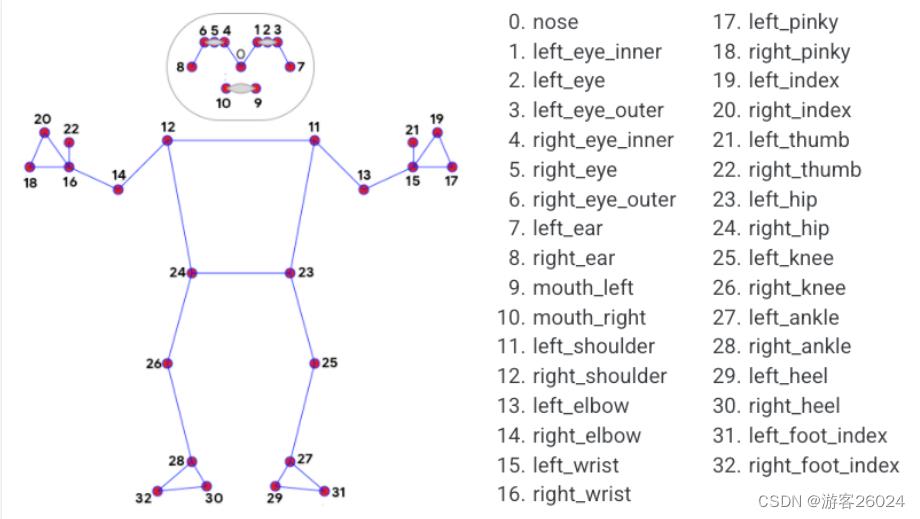
图1.
通常可以通过判断角度,来判断姿态是什么动作。如下图2. (具体动作识别判断:采集不同动作下的图片,然后通过姿态检测,根据角度对图像进行标注,将大量图像作为训练集进行学习,完成姿态行为识别判断。)
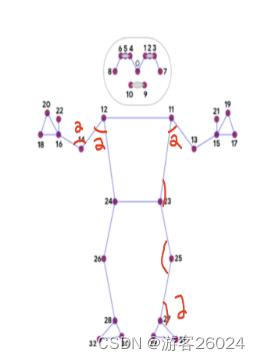
图2.
2.mp_pose.Pose()其参数:
static_image_mode 表示 静态图像还是连续帧视频
model_complexity 表示 人体姿态估计模型; 0 表示 速度最快,精度最低(三者之中);1 表示 速度中间,精度中间(三者之中);2 表示 速度最慢,精度最高(三者之中);
smooth_landmarks 表示 是否平滑关键点;
enable_segmentation 表示 是否对人体进行抠图;
min_detection_confidence 表示 检测置信度阈值;
min_tracking_confidence 表示 各帧之间跟踪置信度阈值;
pose = mp_pose.Pose(static_image_mode=True,
model_complexity=1,
smooth_landmarks=True,
enable_segmentation=True,
min_detection_confidence=0.5,
min_tracking_confidence=0.5)3.solutions.drawing_utils
绘图(可以绘制3D坐标,也可以直接在原图上绘制关键点,姿态)
drawing = mp.solutions.drawing_utils
...
drawing.draw_landmarks(img, results.pose_landmarks, mp_pose.POSE_CONNECTIONS)(原图基础上显示关键点,姿态)
drawing.plot_landmarks(results.pose_world_landmarks, mp_pose.POSE_CONNECTIONS)(3D)之后的代码就是opencv相关
完整代码
import cv2
import mediapipe as mp
if __name__ == '__main__':
mp_pose = mp.solutions.pose
pose = mp_pose.Pose(static_image_mode=True,
model_complexity=1,
smooth_landmarks=True,
# enable_segmentation=True,
min_detection_confidence=0.5,
min_tracking_confidence=0.5)
drawing = mp.solutions.drawing_utils
# read img BGR to RGB
img = cv2.imread("1.jpg")
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
cv2.imshow("input", img)
results = pose.process(img)
drawing.draw_landmarks(img, results.pose_landmarks, mp_pose.POSE_CONNECTIONS)
cv2.imshow("keypoint", img)
drawing.plot_landmarks(results.pose_world_landmarks, mp_pose.POSE_CONNECTIONS)
cv2.waitKey(0)
cv2.destroyAllWindows()运行结果
原图
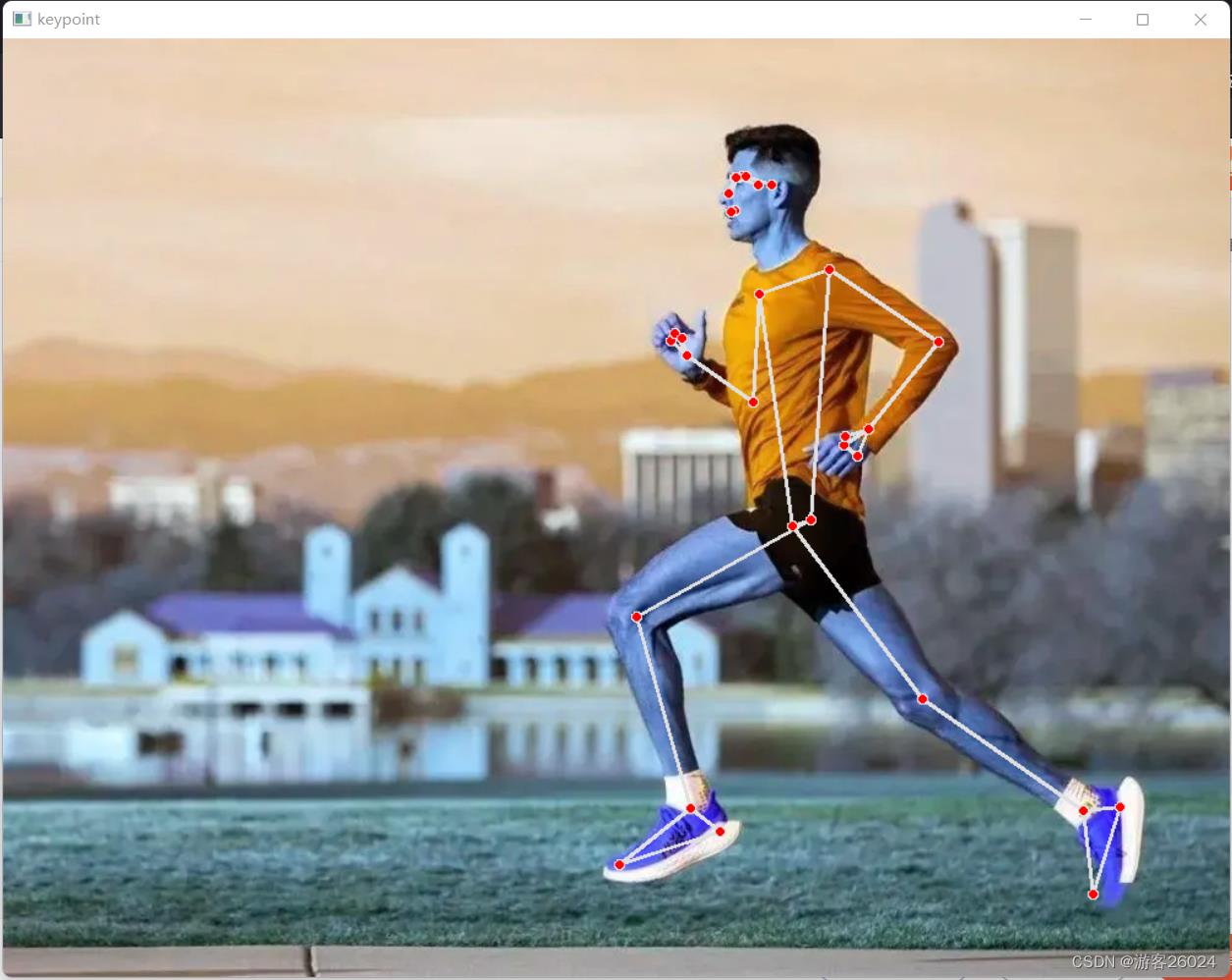
原图基础上显示关键点
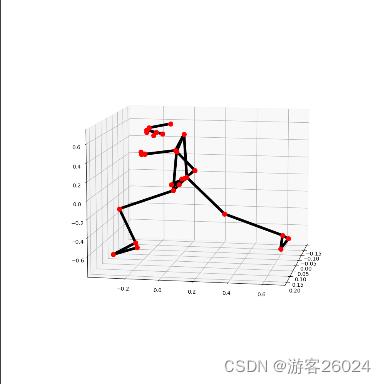
3D坐标
坐标解析
还是拿这个正在跑步的人举例。
代码
import cv2
import mediapipe as mp
import matplotlib.pyplot as plt
mp_pose = mp.solutions.pose
pose = mp_pose.Pose(static_image_mode=False,
model_complexity=0,
smooth_landmarks=True,
enable_segmentation=True,
min_detection_confidence=0.5,
min_tracking_confidence=0.5)
drawing = mp.solutions.drawing_utils
if __name__ == '__main__':
img = cv2.imread('1.jpg')
results = pose.process(img)
print(results.pose_landmarks)# results.pose_landmarks其中 所有关键点的检测结果可以从 results.pose_landmarks 看到如下;这是归一化之后的结果,若要还原,x得乘以宽度得到像素坐标;y得乘以高度得到像素坐标;z坐标的原点在人体左右两个髋关节的中点,方向如果离越近为负值,越远为正值。
landmark
x: 0.5913416743278503
y: 0.17020824551582336
z: -0.10148811340332031
visibility: 0.9999819993972778
landmark
x: 0.5996149778366089
y: 0.15227100253105164
z: -0.11516246944665909
visibility: 0.9999804496765137
landmark
x: 0.6029789447784424
y: 0.15230441093444824
z: -0.1152396947145462
visibility: 0.9999819993972778
landmark
x: 0.6068712472915649
y: 0.15244033932685852
z: -0.11535673588514328
visibility: 0.9999862909317017
landmark
x: 0.5956720113754272
y: 0.15167823433876038
z: -0.07190258055925369
visibility: 0.9999619722366333
landmark
x: 0.5958214998245239
y: 0.1511225700378418
z: -0.07187224179506302
visibility: 0.9999505281448364
landmark
x: 0.5961448550224304
y: 0.15046393871307373
z: -0.07175181061029434
visibility: 0.9999566078186035
landmark
x: 0.6275932788848877
y: 0.16257867217063904
z: -0.12434940785169601
visibility: 0.9999855756759644
landmark
x: 0.612525463104248
y: 0.15917572379112244
z: 0.07216572016477585
visibility: 0.9999306201934814
landmark
x: 0.5972875952720642
y: 0.1862889975309372
z: -0.10227096825838089
visibility: 0.9999692440032959
landmark
x: 0.592987596988678
y: 0.18590152263641357
z: -0.04587363451719284
visibility: 0.9999159574508667
landmark
x: 0.6709297895431519
y: 0.25625985860824585
z: -0.19476133584976196
visibility: 0.9999887943267822
landmark
x: 0.6155267357826233
y: 0.27312740683555603
z: 0.23764272034168243
visibility: 0.9998886585235596
landmark
x: 0.76192706823349
y: 0.32696548104286194
z: -0.23866404592990875
visibility: 0.9991742968559265
landmark
x: 0.6149069666862488
y: 0.37373778223991394
z: 0.3292929530143738
visibility: 0.2991478443145752
landmark
x: 0.7010799646377563
y: 0.4162237048149109
z: -0.18799468874931335
visibility: 0.9904139637947083
landmark
x: 0.5629619359970093
y: 0.34696149826049805
z: 0.2674705684185028
visibility: 0.40632331371307373
landmark
x: 0.6892314553260803
y: 0.43785160779953003
z: -0.21043820679187775
visibility: 0.9691246151924133
landmark
x: 0.5501535534858704
y: 0.334354966878891
z: 0.26719772815704346
visibility: 0.36899450421333313
landmark
x: 0.6795801520347595
y: 0.4296255111694336
z: -0.19730502367019653
visibility: 0.9676418304443359
landmark
x: 0.5508479475975037
y: 0.3242868185043335
z: 0.23829618096351624
visibility: 0.37453970313072205
landmark
x: 0.6808692216873169
y: 0.4231947660446167
z: -0.17752741277217865
visibility: 0.9631088972091675
landmark
x: 0.555029034614563
y: 0.3278791904449463
z: 0.2512615919113159
visibility: 0.3893350064754486
landmark
x: 0.6576938033103943
y: 0.5196953415870667
z: -0.14214162528514862
visibility: 0.9999549388885498
landmark
x: 0.6405556797981262
y: 0.5202372074127197
z: 0.14222070574760437
visibility: 0.9999477863311768
landmark
x: 0.5241203904151917
y: 0.6201881766319275
z: -0.15834815800189972
visibility: 0.9693808555603027
landmark
x: 0.7318142056465149
y: 0.6902449727058411
z: 0.11025446653366089
visibility: 0.9495575428009033
landmark
x: 0.5604070425033569
y: 0.815612256526947
z: -0.03564663231372833
visibility: 0.9501809477806091
landmark
x: 0.8767399191856384
y: 0.8223288655281067
z: 0.1430264711380005
visibility: 0.9820705652236938
landmark
x: 0.5801612138748169
y: 0.8386951684951782
z: -0.026119956746697426
visibility: 0.9103515148162842
landmark
x: 0.8959819078445435
y: 0.875182569026947
z: 0.14569874107837677
visibility: 0.9787982106208801
landmark
x: 0.5071742534637451
y: 0.875374436378479
z: -0.06918345391750336
visibility: 0.9140819907188416
landmark
x: 0.88722825050354
y: 0.9008339643478394
z: 0.09929685294628143
visibility: 0.9545168280601501
调用
print(mp_pose.POSE_CONNECTIONS)
# mp_pose.POSE_CONNECTIONSmp_pose.POSE_CONNECTIONS表示人体33个关键点如何连接的骨架
frozenset((15, 21),
(16, 20),
(18, 20),
(3, 7),
(14, 16),
(23, 25),
(28, 30),
(11, 23),
(27, 31),
(6, 8),
(15, 17),
(24, 26),
(16, 22),
(4, 5),
(5, 6),
(29, 31),
(12, 24),
(23, 24),
(0, 1),
(9, 10),
(1, 2),
(0, 4),
(11, 13),
(30, 32),
(28, 32),
(15, 19),
(16, 18),
(25, 27),
(26, 28),
(12, 14),
(17, 19),
(2, 3),
(11, 12),
(27, 29),
(13, 15))调用
print(results.pose_landmarks.landmark[mp_pose.PoseLandmark.LEFT_EYE])
print(results.pose_landmarks.landmark[2])
# results.pose_landmarks.landmark[mp_pose.PoseLandmark.LEFT_EYE]
# or
# results.pose_landmarks.landmark[2]查看左眼属性
x: 0.6029789447784424
y: 0.15230441093444824
z: -0.1152396947145462
visibility: 0.9999819993972778调用左眼的x轴
print(results.pose_landmarks.landmark[2].x)
# results.pose_landmarks.landmark[2].x查看左眼的x轴
0.6029789447784424还原左眼像素
height, width, channels = img.shape
print("x:,y:".format(results.pose_landmarks.landmark[2].x * width,
results.pose_landmarks.landmark[2].y * height))
#(results.pose_landmarks.landmark[2].x * width,results.pose_landmarks.landmark[2].y * height)查看左眼像素
x:602.9789447784424,y:116.5128743648529获取左眼真实坐标 (真实坐标位于人体左右两个髋关节的中点)
print(results.pose_world_landmarks.landmark[2])
# results.pose_world_landmarks.landmark[2]查看
x: -0.1573336124420166
y: -0.6765229105949402
z: -0.09651455283164978
visibility: 0.9999819993972778交互式三维可视化
核心思想都是将谷歌的pose_landmarks.landmark坐标提取出来,处理成python的列表数据格式
有两种方式获取三维坐标,可以测得每种方式的FPS
1.map
import time
import cv2
import numpy as np
import mediapipe as mp
mp_pose = mp.solutions.pose
pose = mp_pose.Pose(static_image_mode=False,
model_complexity=0,
smooth_landmarks=True,
enable_segmentation=True,
min_detection_confidence=0.5,
min_tracking_confidence=0.5)
drawing = mp.solutions.drawing_utils
# 提取x,y,z坐标
def get_x(each):
return each.x
def get_y(each):
return each.y
def get_z(each):
return each.z
if __name__ == '__main__':
t0 = time.time()
img = cv2.imread('1.jpg')
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
results = pose.process(img)
drawing.draw_landmarks(img, results.pose_landmarks, mp_pose.POSE_CONNECTIONS)
coords = np.array(results.pose_landmarks.landmark)
x = np.array(list(map(get_x, coords)))
y = np.array(list(map(get_y, coords)))
z = np.array(list(map(get_z, coords)))
point = np.vstack((x, y, z)).T
print("FPS: ".format(str(int(1 / (time.time() - t0)))))
print(point)运行结果
FPS: 4
[[ 0.59134167 0.17020825 -0.10148811]
[ 0.59961498 0.152271 -0.11516247]
[ 0.60297894 0.15230441 -0.11523969]
[ 0.60687125 0.15244034 -0.11535674]
[ 0.59567201 0.15167823 -0.07190258]
[ 0.5958215 0.15112257 -0.07187224]
[ 0.59614486 0.15046394 -0.07175181]
[ 0.62759328 0.16257867 -0.12434941]
[ 0.61252546 0.15917572 0.07216572]
[ 0.5972876 0.186289 -0.10227097]
[ 0.5929876 0.18590152 -0.04587363]
[ 0.67092979 0.25625986 -0.19476134]
[ 0.61552674 0.27312741 0.23764272]
[ 0.76192707 0.32696548 -0.23866405]
[ 0.61490697 0.37373778 0.32929295]
[ 0.70107996 0.4162237 -0.18799469]
[ 0.56296194 0.3469615 0.26747057]
[ 0.68923146 0.43785161 -0.21043821]
[ 0.55015355 0.33435497 0.26719773]
[ 0.67958015 0.42962551 -0.19730502]
[ 0.55084795 0.32428682 0.23829618]
[ 0.68086922 0.42319477 -0.17752741]
[ 0.55502903 0.32787919 0.25126159]
[ 0.6576938 0.51969534 -0.14214163]
[ 0.64055568 0.52023721 0.14222071]
[ 0.52412039 0.62018818 -0.15834816]
[ 0.73181421 0.69024497 0.11025447]
[ 0.56040704 0.81561226 -0.03564663]
[ 0.87673992 0.82232887 0.14302647]
[ 0.58016121 0.83869517 -0.02611996]
[ 0.89598191 0.87518257 0.14569874]
[ 0.50717425 0.87537444 -0.06918345]
[ 0.88722825 0.90083396 0.09929685]]
Process finished with exit code 02.for
import time
import cv2
import numpy as np
import mediapipe as mp
mp_pose = mp.solutions.pose
pose = mp_pose.Pose(static_image_mode=False,
model_complexity=0,
smooth_landmarks=True,
enable_segmentation=True,
min_detection_confidence=0.5,
min_tracking_confidence=0.5)
drawing = mp.solutions.drawing_utils
point_x = []
point_y = []
point_z = []
# 提取x,y,z坐标
def get_x_y_z(each):
point_x.append(each.x)
point_y.append(each.y)
point_z.append(each.z)
return point_x, point_y, point_z
if __name__ == '__main__':
t0 = time.time()
img = cv2.imread('1.jpg')
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
results = pose.process(img)
drawing.draw_landmarks(img, results.pose_landmarks, mp_pose.POSE_CONNECTIONS)
coords = np.array(results.pose_landmarks.landmark)
for index, each in enumerate(coords):
x, y, z = get_x_y_z(each)
point = np.vstack((x, y, z)).T
print("FPS: ".format(str(int(1 / (time.time() - t0)))))
print(point)运行结果
FPS: 4
[[ 0.59134167 0.17020825 -0.10148811]
[ 0.59961498 0.152271 -0.11516247]
[ 0.60297894 0.15230441 -0.11523969]
[ 0.60687125 0.15244034 -0.11535674]
[ 0.59567201 0.15167823 -0.07190258]
[ 0.5958215 0.15112257 -0.07187224]
[ 0.59614486 0.15046394 -0.07175181]
[ 0.62759328 0.16257867 -0.12434941]
[ 0.61252546 0.15917572 0.07216572]
[ 0.5972876 0.186289 -0.10227097]
[ 0.5929876 0.18590152 -0.04587363]
[ 0.67092979 0.25625986 -0.19476134]
[ 0.61552674 0.27312741 0.23764272]
[ 0.76192707 0.32696548 -0.23866405]
[ 0.61490697 0.37373778 0.32929295]
[ 0.70107996 0.4162237 -0.18799469]
[ 0.56296194 0.3469615 0.26747057]
[ 0.68923146 0.43785161 -0.21043821]
[ 0.55015355 0.33435497 0.26719773]
[ 0.67958015 0.42962551 -0.19730502]
[ 0.55084795 0.32428682 0.23829618]
[ 0.68086922 0.42319477 -0.17752741]
[ 0.55502903 0.32787919 0.25126159]
[ 0.6576938 0.51969534 -0.14214163]
[ 0.64055568 0.52023721 0.14222071]
[ 0.52412039 0.62018818 -0.15834816]
[ 0.73181421 0.69024497 0.11025447]
[ 0.56040704 0.81561226 -0.03564663]
[ 0.87673992 0.82232887 0.14302647]
[ 0.58016121 0.83869517 -0.02611996]
[ 0.89598191 0.87518257 0.14569874]
[ 0.50717425 0.87537444 -0.06918345]
[ 0.88722825 0.90083396 0.09929685]]
Process finished with exit code 0FPS都差不多
之后显示成三维
import cv2
import time
import numpy as np
import open3d
import mediapipe as mp
mp_pose = mp.solutions.pose
pose = mp_pose.Pose(static_image_mode=False,
model_complexity=0,
smooth_landmarks=True,
enable_segmentation=True,
min_detection_confidence=0.5,
min_tracking_confidence=0.5)
drawing = mp.solutions.drawing_utils
point_x = []
point_y = []
point_z = []
# 提取x,y,z坐标
def get_x_y_z(each):
point_x.append(each.x)
point_y.append(each.y)
point_z.append(each.z)
return point_x, point_y, point_z
if __name__ == '__main__':
img = cv2.imread('1.jpg')
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
results = pose.process(img)
drawing.draw_landmarks(img, results.pose_landmarks, mp_pose.POSE_CONNECTIONS)
coords = np.array(results.pose_landmarks.landmark)
for index, each in enumerate(coords):
x, y, z = get_x_y_z(each)
point = np.vstack((x, y, z)).T
# 3d点云 3维可视化
point_cloud = open3d.geometry.PointCloud()
points = open3d.utility.Vector3dVector(point)
point_cloud.points = points
open3d.visualization.draw_geometries([point_cloud])运行结果
关键点3D交互式可视化
优化显示效果
预测的关键点更加显著
将各个关键点加粗成莫兰迪色
莫兰蒂色卡
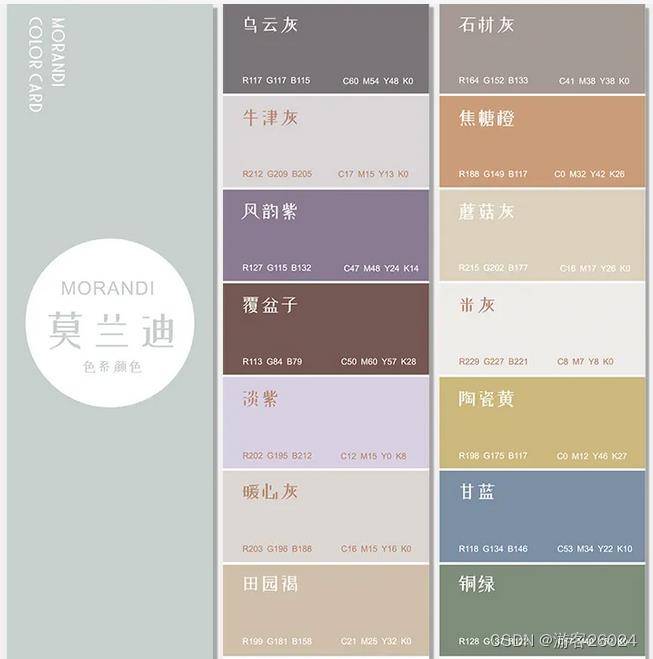
因为现在的img通道是bgr,所以调色板的rgb顺序得对换以下
代码优化
import cv2
import numpy as np
import mediapipe as mp
mp_pose = mp.solutions.pose
pose = mp_pose.Pose(static_image_mode=True,
model_complexity=2,
smooth_landmarks=True,
min_detection_confidence=0.5,
min_tracking_confidence=0.5)
drawing = mp.solutions.drawing_utils
img = cv2.imread("1.jpg")
height, width, channels = img.shape
point_x = []
point_y = []
# 提取x,y坐标
def get_x_y(each):
point_x.append(int(each.x * width))
point_y.append(int(each.y * height))
return point_x, point_y
if __name__ == '__main__':
print("height:, width:".format(height, width))
results = pose.process(img)
drawing.draw_landmarks(img, results.pose_landmarks, mp_pose.POSE_CONNECTIONS)
coords = np.array(results.pose_landmarks.landmark)
for index, each in enumerate(coords):
x, y = get_x_y(each)
points = np.vstack((x, y)).T
radius = 5
for index, point in enumerate(points):
# nose
if index == 0:
img = cv2.circle(img, (point[0], point[1]), radius, (133, 152, 164), -1)
# shoulder
elif index in [11, 12]:
img = cv2.circle(img, (point[0], point[1]), radius, (117, 149, 188), -1)
# hip joint
elif index in [23, 24]:
img = cv2.circle(img, (point[0], point[1]), radius, (177, 202, 215), -1)
# elbow
elif index in [13, 14]:
img = cv2.circle(img, (point[0], point[1]), radius, (221, 227, 229), -1)
# lap
elif index in [25, 26]:
img = cv2.circle(img, (point[0], point[1]), radius, (117, 175, 198), -1)
# wrist and ankle
elif index in [15, 16, 27, 28]:
img = cv2.circle(img, (point[0], point[1]), radius, (146, 134, 118), -1)
# left hand
elif index in [17, 19, 21]:
img = cv2.circle(img, (point[0], point[1]), radius, (122, 137, 128), -1)
# right hand
elif index in [18, 20, 22]:
img = cv2.circle(img, (point[0], point[1]), radius, (115, 117, 117), -1)
# left feet
elif index in [27, 29, 31]:
img = cv2.circle(img, (point[0], point[1]), radius, (205, 209, 212), -1)
# right feet
elif index in [28, 30, 32]:
img = cv2.circle(img, (point[0], point[1]), radius, (132, 115, 132), -1)
# mouth
elif index in [9, 10]:
img = cv2.circle(img, (point[0], point[1]), radius, (79, 84, 113), -1)
# face and eye
elif index in [1, 2, 3, 4, 5, 6, 7, 8]:
img = cv2.circle(img, (point[0], point[1]), radius, (212, 195, 202), -1)
# other
else:
img = cv2.circle(img, (point[0], point[1]), radius, (140, 47, 240), -1)
cv2.imshow("aug_keypoint", img)
cv2.waitKey(0)
cv2.destroyAllWindows()运行结果

实时视频人体姿态估计
1.摄像头拍摄视频实时人体姿态估计
算法核心:摄像头打开后估计人体姿态,10秒钟退出。
若觉得10秒太短,可修改:
if ((time.time() - t0) // 1) == 10:完整代码
import sys
import cv2
import time
import mediapipe as mp
mp_pose = mp.solutions.pose
drawing = mp.solutions.drawing_utils
pose = mp_pose.Pose(static_image_mode=False,
model_complexity=1,
smooth_landmarks=True,
enable_segmentation=True,
min_detection_confidence=0.5,
min_tracking_confidence=0.5)
def process_frame(img):
results = pose.process(img)
drawing.draw_landmarks(img, results.pose_landmarks, mp_pose.POSE_CONNECTIONS)
return img
if __name__ == '__main__':
t0 = time.time()
cap = cv2.VideoCapture(0)
cap.open(0)
while cap.isOpened():
success, frame = cap.read()
if not success:
raise ValueError("Error")
frame = process_frame(frame)
cv2.imshow("keypoint", frame)
if ((time.time() - t0) // 1) == 10:
sys.exit(0)
cv2.waitKey(1)
cap.release()
cv2.destroyAllWindows()此代码能正常运行,不展示运行结果!
2.视频实时人体姿态估计
算法核心:打开保存好的视频后估计人体姿态,视频读取完后退出。
完整代码
import os
import sys
import cv2
import mediapipe as mp
BASE_DIR = os.path.dirname((os.path.abspath(__file__)))
print(BASE_DIR)
sys.path.append(BASE_DIR)
mp_pose = mp.solutions.pose
drawing = mp.solutions.drawing_utils
pose = mp_pose.Pose(static_image_mode=False,
model_complexity=1,
smooth_landmarks=True,
enable_segmentation=True,
min_detection_confidence=0.5,
min_tracking_confidence=0.5)
def process_frame(img):
results = pose.process(img)
drawing.draw_landmarks(img, results.pose_landmarks, mp_pose.POSE_CONNECTIONS)
return img
if __name__ == '__main__':
video_dirs = os.path.join(BASE_DIR, "1.mp4")
cap = cv2.VideoCapture(video_dirs)
while cap.isOpened():
success, frame = cap.read()
if frame is None:
break
if success == True:
frame = process_frame(frame)
cv2.imshow("keypoint", frame)
cv2.waitKey(1)
cap.release()
cv2.destroyAllWindows()运行结果
原视频是最近报爆火的刘耕宏健身操。
人体姿态检测
在这个视频中证明此算法还是存在缺陷,因为视频中无法很好的将两人同时识别。
3.视频实时人体姿态估计代码优化
运用了上面所提及的莫兰迪色系,作为关键点的颜色。
完整代码
import cv2
import time
import numpy as np
from tqdm import tqdm
import mediapipe as mp
mp_pose = mp.solutions.pose
pose = mp_pose.Pose(static_image_mode=True,
model_complexity=2,
smooth_landmarks=True,
min_detection_confidence=0.5,
min_tracking_confidence=0.5)
drawing = mp.solutions.drawing_utils
def process_frame(img):
height, width, channels = img.shape
start = time.time()
results = pose.process(img)
if results.pose_landmarks:
drawing.draw_landmarks(img, results.pose_landmarks, mp_pose.POSE_CONNECTIONS)
coords = np.array(results.pose_landmarks.landmark)
for index, each in enumerate(coords):
cx = int(each.x * width)
cy = int(each.y * height)
cz = each.z
radius = 5
# nose
if index == 0:
img = cv2.circle(img, (cx, cy), radius, (133, 152, 164), -1)
# shoulder
elif index in [11, 12]:
img = cv2.circle(img, (cx, cy), radius, (117, 149, 188), -1)
# hip joint
elif index in [23, 24]:
img = cv2.circle(img, (cx, cy), radius, (177, 202, 215), -1)
# elbow
elif index in [13, 14]:
img = cv2.circle(img, (cx, cy), radius, (221, 227, 229), -1)
# lap
elif index in [25, 26]:
img = cv2.circle(img, (cx, cy), radius, (117, 175, 198), -1)
# wrist and ankle
elif index in [15, 16, 27, 28]:
img = cv2.circle(img, (cx, cy), radius, (146, 134, 118), -1)
# left hand
elif index in [17, 19, 21]:
img = cv2.circle(img, (cx, cy), radius, (122, 137, 128), -1)
# right hand
elif index in [18, 20, 22]:
img = cv2.circle(img, (cx, cy), radius, (115, 117, 117), -1)
# left feet
elif index in [27, 29, 31]:
img = cv2.circle(img, (cx, cy), radius, (205, 209, 212), -1)
# right feet
elif index in [28, 30, 32]:
img = cv2.circle(img, (cx, cy), radius, (132, 115, 132), -1)
# mouth
elif index in [9, 10]:
img = cv2.circle(img, (cx, cy), radius, (79, 84, 113), -1)
# face and eye
elif index in [1, 2, 3, 4, 5, 6, 7, 8]:
img = cv2.circle(img, (cx, cy), radius, (212, 195, 202), -1)
# other
else:
img = cv2.circle(img, (cx, cy), radius, (140, 47, 240), -1)
else:
fail = "fail detection"
img = cv2.putText(img, fail, (25, 100), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 3)
FPS = 1 / (time.time() - start)
img = cv2.putText(img, "FPS" + str(int(FPS)), (25, 50), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 3)
return img
def out_video(input):
file = input.split("/")[-1]
output = "out-" + file
print("It will start processing video: ".format(input))
cap = cv2.VideoCapture(input)
frame_count = int(cap.get(cv2.CAP_PROP_FRAME_COUNT))
frame_size = (cap.get(cv2.CAP_PROP_FRAME_WIDTH), cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
# # create VideoWriter,VideoWriter_fourcc is video decode
fourcc = cv2.VideoWriter_fourcc(*'mp4v')
fps = cap.get(cv2.CAP_PROP_FPS)
out = cv2.VideoWriter(output, fourcc, fps, (int(frame_size[0]), int(frame_size[1])))
# the progress bar
with tqdm(range(frame_count)) as pbar:
while cap.isOpened():
success, frame = cap.read()
if not success:
break
try:
frame = process_frame(frame)
out.write(frame)
pbar.update(1)
except:
print("ERROR")
pass
pbar.close()
cv2.destroyAllWindows()
out.release()
cap.release()
print(" finished!".format(output))
if __name__ == '__main__':
video_dirs = "1.mp4"
out_video(video_dirs)运行结果
pbar程序运行
人体关键点检测优化
很明显比之前的效果更好!
第一次做视频效果不太熟练还请见谅!
下一话
 https://blog.csdn.net/XiaoyYidiaodiao/article/details/125565738?spm=1001.2014.3001.5502
https://blog.csdn.net/XiaoyYidiaodiao/article/details/125565738?spm=1001.2014.3001.5502以上是关于3D视觉——1.人体姿态估计(Pose Estimation)入门——使用MediaPipe含单帧(Signel Frame)与实时视频(Real-Time Video)的主要内容,如果未能解决你的问题,请参考以下文章