计算机组成原理与接口技术笔记
Posted 楠木_
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了计算机组成原理与接口技术笔记相关的知识,希望对你有一定的参考价值。
计算机组成原理与接口技术
——基于MIPS架构
目录
- 计算机组成原理与接口技术
为什么要写这个笔记?
课后整理笔记是一个复习的过程。上学期写了一个数字电路的笔记,感觉这门课一下子得心应手起来。这学期继续这个做法,选几门觉得难的课程整理下笔记
写给读者
感谢你阅读本笔记,转载请注明作者。有任何问题可以与我联系,我的邮箱是wnn2000@hust.edu.cn
第一章 计算机基础
1. 计算机结构
计算机系统由软件和硬件组成,这门课主要研究硬件
计算机硬件包括CPU、存储器、I/O设备等
CPU
CPU由ALU、控制器、寄存器组成
ALU是运算单元
控制器负责控制信号
CPU位数 = CPU中寄存器的位数 = CPU能够一次并行处理的数据宽度 = 数据总线宽度
例如64位计算机,其CPU中寄存器的位数为64。它一次能并行处理64位的数据。它的数据总线宽度为64
存储器
存储器就是内存,由存储矩阵构成,最小存储单位为Byte,即8个bit
总线
总线是指计算机组件间规范化的交换数据的方式
总线分为数据总线、控制总线、地址总线
数据总线是用来传输数据的,是双向的
控制总线是控制数据传输方向的信号线,是双向的
地址总线是传输数据位置的,是单向的
2. 计算机工作原理
基本术语
指令:计算机能识别并执行的基本操作命令
指令由操作数和操作码组成。操作码决定要完成什么操作,操作数指参加运算的数据及其所在的地址
指令以二进制的形式存在内存中
指令集:计算机全部指令的集合
程序:完成既定任务的指令序列
工作过程
1.读取指令
2.指令译码
3.获取数据
4.执行运算
5.存储结果
3. 计算机结构模型
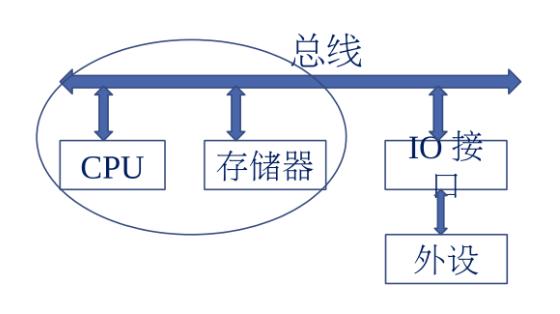
冯诺依曼结构
计算机由控制器、运算器、存储器、输入设备、输出设备五大部分组成
程序和数据以二进制不加区分存在存储器(数据类型是由程序决定的)
计算机只有一个CPU,一个存储器,一套总线。CPU的速度越来越快,但是由于只有一个存储器和一套总线,使得读数据、读指令、存放结果不能并行
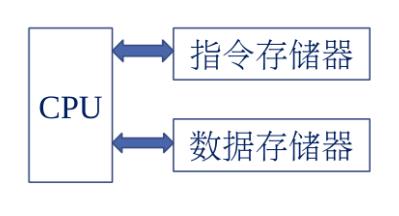
哈佛结构
为了解决以上问题,提出哈佛结构。提供两个存储器分别存放指令和数据,同时提供两套总线
代价是增加了复杂度
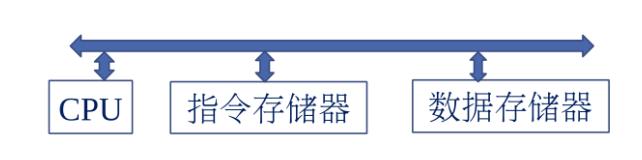
改进的哈佛结构
提供两个存储器,但只有一套总线
混合结构
现在最常见的是混合结构
4. 计算机中的信息表示
计算机是数字电路,存储的信息都是二进制信息
数制转换
这部分网络资料很多,就不记了
整数的编码
原码、反码、补码参考:https://www.jianshu.com/p/36ec7a047f29
这里提一下模的概念,模是符号位的进位位的权值。例如有8位二进制,模是第9位的权值,即28=256
负数的补码为模减去该数的绝对值,这是负数补码的定义,可以越过原码和反码
事实上,有些负数的原码和反码不存在,不能通过反码+1的方法计算补码。比如计算-128的8位补码,-128的8位反码不存在,那么-128的补码为:256-128=128,即1000 0000
机器码的概念:机器码包括原码、反码、补码和移码
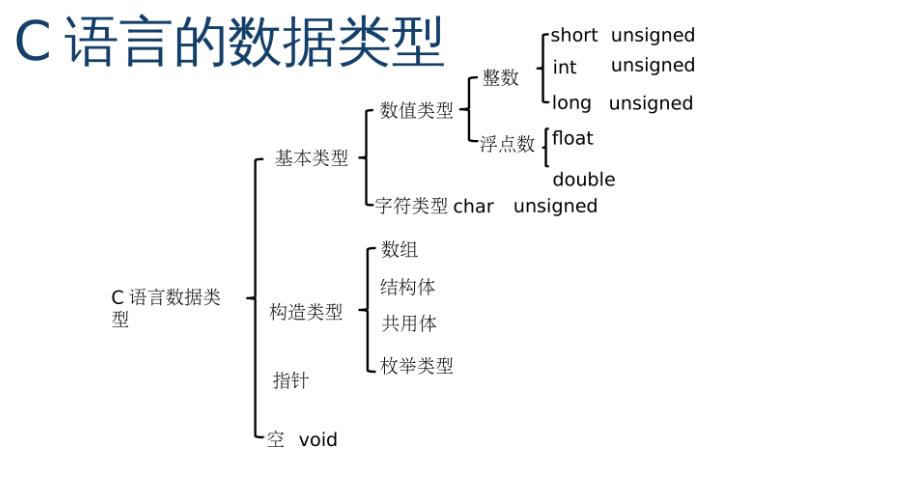
小数的编码
定点数
不需要保存小数点的位置,所有位置都用来存储数字
包括定点整数、定点纯小数、定点带小数
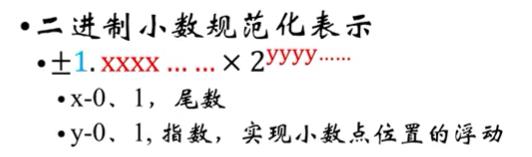
浮点数
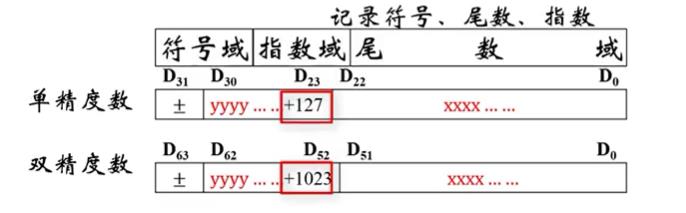
遵循IEEE 754编码,分为单精度和双精度。单精度有32位,双精度有64位。浮点数从高位到低位分别是符号域、指数域和尾数域。其中符号域为了正负数的统一,需要加上偏移量
具体过程如图所示,首先将实数进行二进制小数规范化,再填入对应的域,注意指数域需要加上偏差
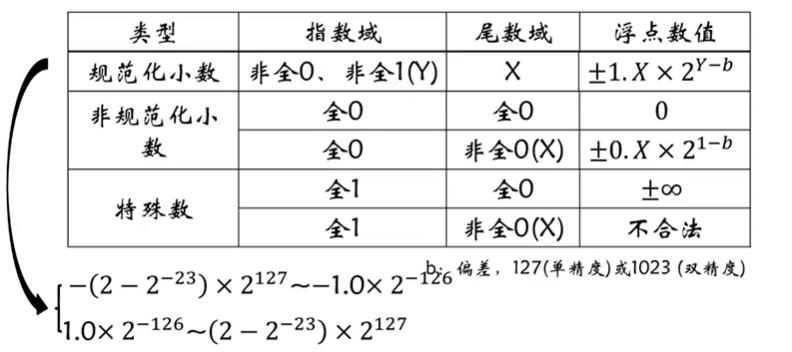
以下是特殊情况和单精度规范化浮点数的表示范围
5. 计算机的运算基础
整数运算
无符号数运算
直接算
溢出:当最高为向更高位有进位(或借位)时产生溢出
产生的进位或借位由状态寄存器的CF位保存
有符号数运算
加减统一为补码运算
溢出:最高位进位状态⊕次高位进位状态=1,则溢出。溢出只可能发生在同符号的数运算之间
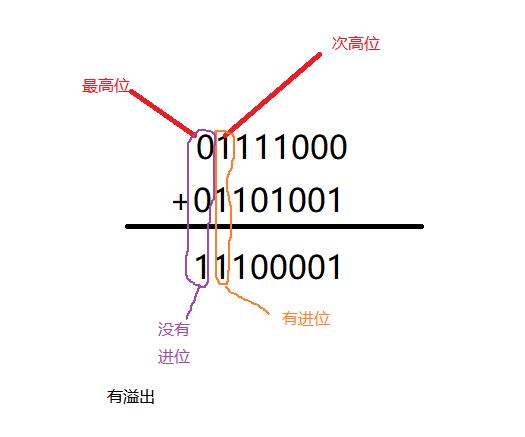
最高位和次高位,一个有进位一个没有进位,则他们的状态异或得1,则结果就有溢出
浮点数运算(难点)
1.检测0操作数,如果有一个是0就不用算了
2.指数对齐。小的指数向大的对齐。原因是:小的向大的对齐时,指数小的那个数的小数点左移,其尾数域右端的数字被移出,误差小;而反过来误差较大
3.尾数求和。都用补码运算
4.结果规范化
例题:计算1.5 - 27.5(单精度)
首先把两个浮点数表示出来
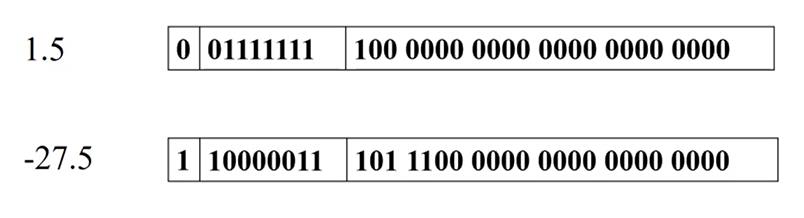
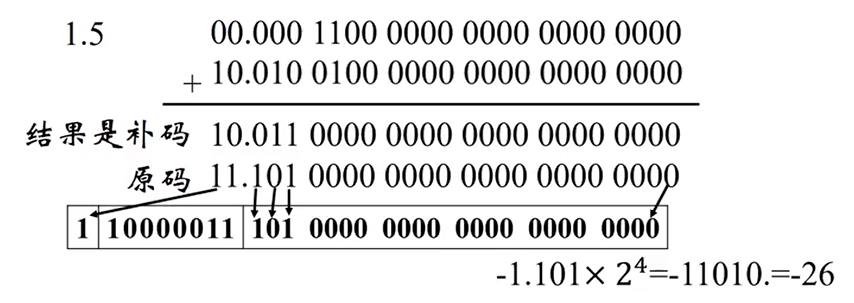
把1.5的小数点左移,与-27.5的补码相加。得到的结果依然是补码,再变回原码
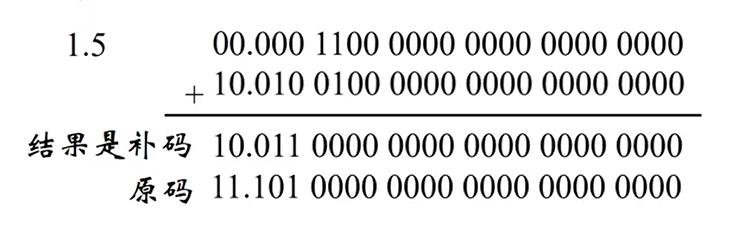
已经是规范化的小数了,本题结束
6.计算机中的信息存储
当数据存在连续的存储空间时,其地址是就是存储空间的首地址
大字节序:高位存入低地址,低位存入高地址(MIPS采用大字节序)
小字节序:高位存入高地址,低位存入低地址
第二章 MIPS汇编语言
1.计算机语言
高级语言:独立于硬件,描述算法
汇编语言:使用助记符号和地址符号来表示指令的语言,又称符号语言
机器语言:依赖硬件,是二进制代码,计算机可以直接执行
汇编:把汇编语言翻译成机器语言的过程
汇编程序:实现汇编过程的软件
汇编语言程序:用户用汇编语言编写的程序
2.计算机指令架构
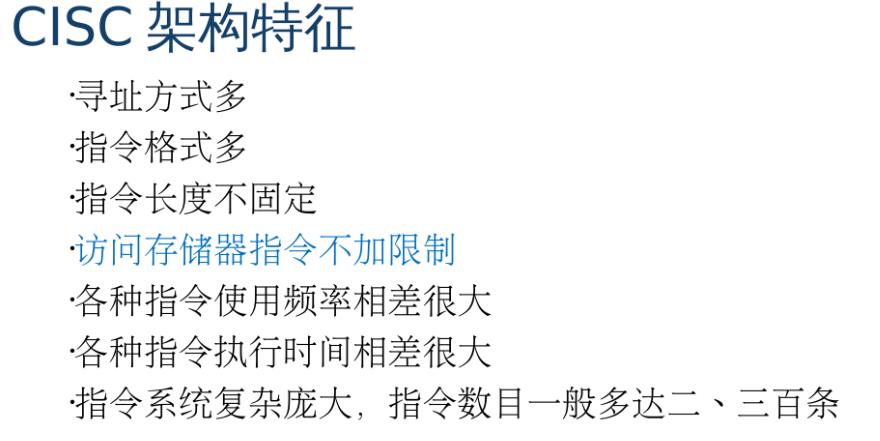
CISC(复杂指令集计算机)
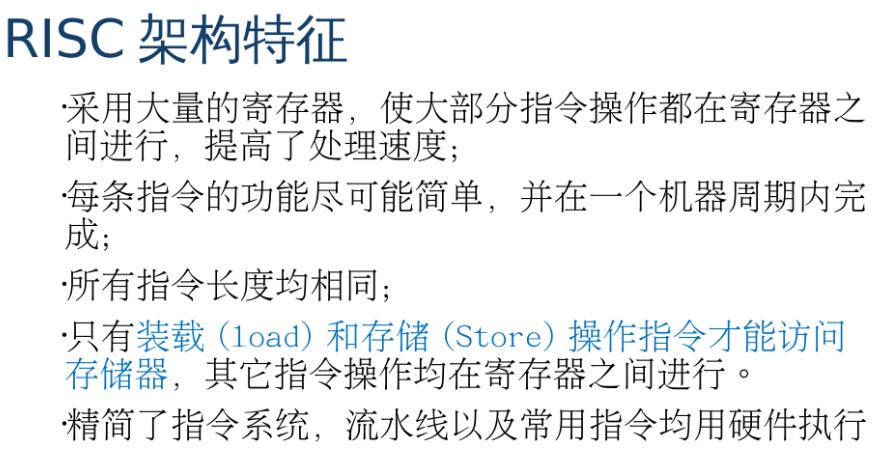
RISC(精简指令集计算机)
两种架构的对比
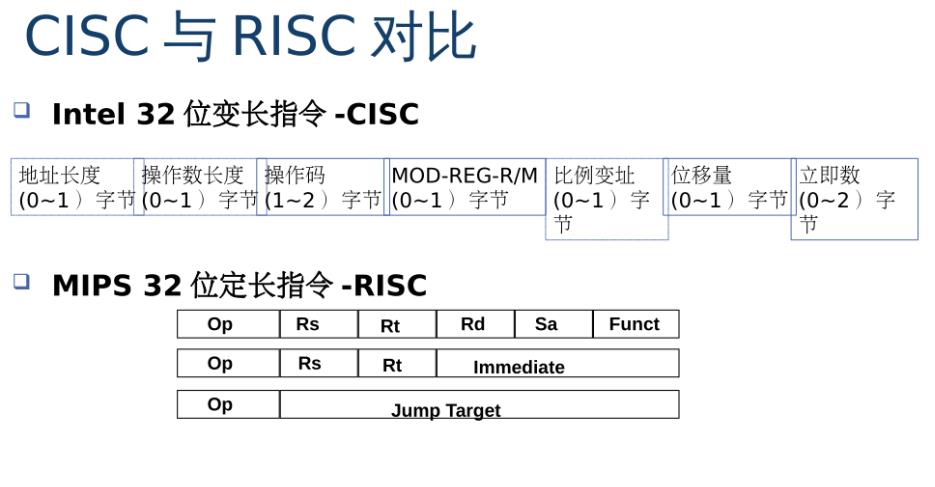
可以看出CISC的指令种类较多,长度不固定
而RISC只有三类指令,长度固定。注意:RISC只有装载和存储可以访问存储器,其他指令都在寄存器之间进行
二者各用用处,这门课我们学习的MIPS架构采用精简指令集(RISC)
3.MIPS汇编指令概述
MIPS指令结构
MIPS汇编指令基本结构如下图
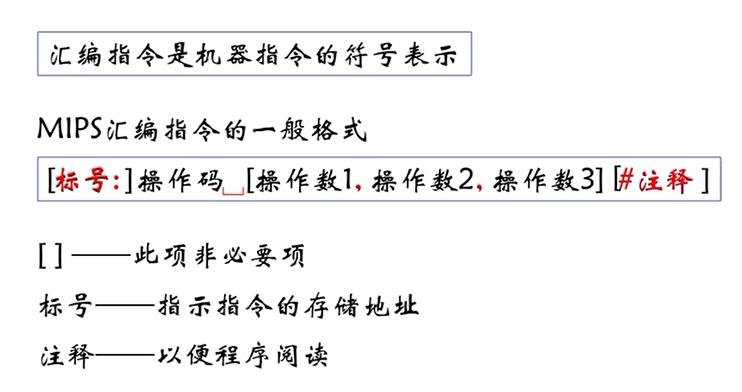
在下面这条示例指令中,add是操作码,决定这条指令进行加法操作;a, b, c是三个操作数,是操作的对象,其中a是目的操作数b, c是源操作数
add a, b, c
MIPS操作数类型
操作数只有三种,分别是寄存器、存储器和立即数
寄存器操作数:是CPU内部的寄存器,表示方法是美元符加上寄存器的名称或编号,如$s0,$s7,$3
存储器操作数:是内部存储器,在MIPS架构下仅用于装载(Load)和存储(Store)指令。表示方法是常数加上括号寄存器的形式,其中的常数是偏移量,如4($s3)
立即数操作数:就是常数,如4,8
MIPS指令类型

指令中的u表示操作数据是无符号数。这就解释了为什么之前说内存中的数据类型是程序决定的
指令中的i表示这条指令的操作数含有立即数
数据传送指令中的w h b分别表示这条指令针对的数据是字、半字、字节
这里将MIPS指令按照功能分类,之后我们还会按照编码方式分类
4.MIPS指令操作数
寄存器操作数
MIPS有32个通用寄存器($0-$31),具体内容如下图
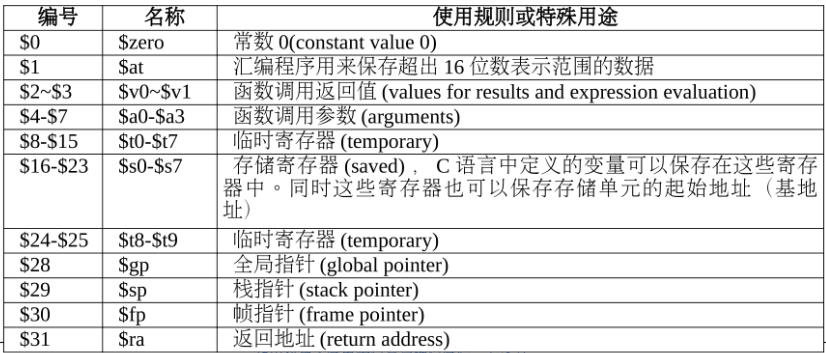
没列出的$26,$27寄存器保留给异常处理函数使用
存储器操作数
MIPS数据存储要求边界对齐。半字存储地址需要为偶数;字的存储地址需要为4的整数倍。MIPS指令是32位的,即一个字,所以指令的地址也是4的整数倍
表示方法仅有一种,是常数加上括号寄存器的形式,其中的常数是偏移量,如4($s3)
例如,A中存储int,A保存在$s8中,请表示A[8]
答案为:32($8)。因为每一个int占据4个字节,偏移量为32
立即数操作数
是指出现在指令中的常数,如下列指令中的40
addi $s1,$s2,40
立即数可以有10进制或者16进制表达方式。后者需要有0x作为前缀
5.MIPS指令编码
我们知道MIPS的指令编码都是定长的,那么如何用二进制编码指令,即如何表示指令的操作码和操作数?
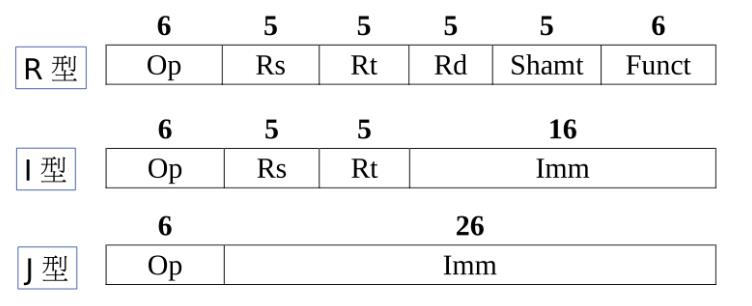
回答这个问题前,我们将指令分为R型,I型,J型三种指令。实际上,我们分类的标准是这三种指令有不同的编码形式
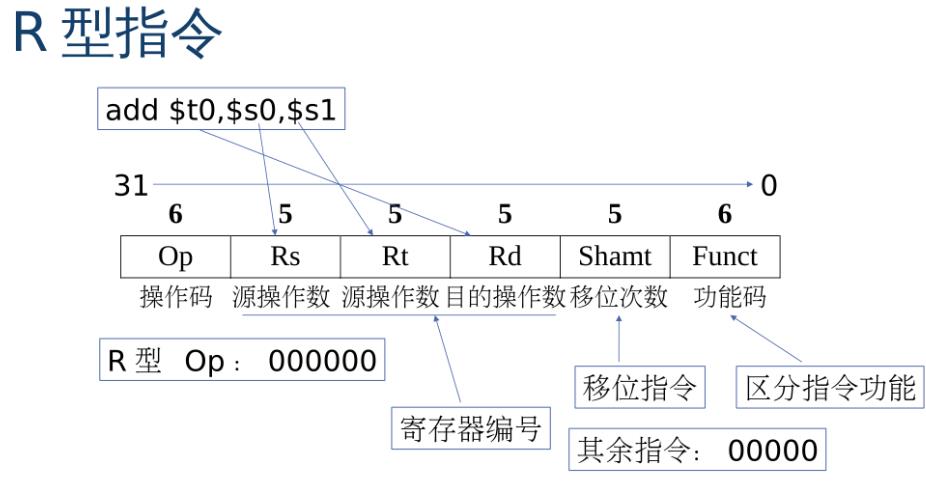
R型指令
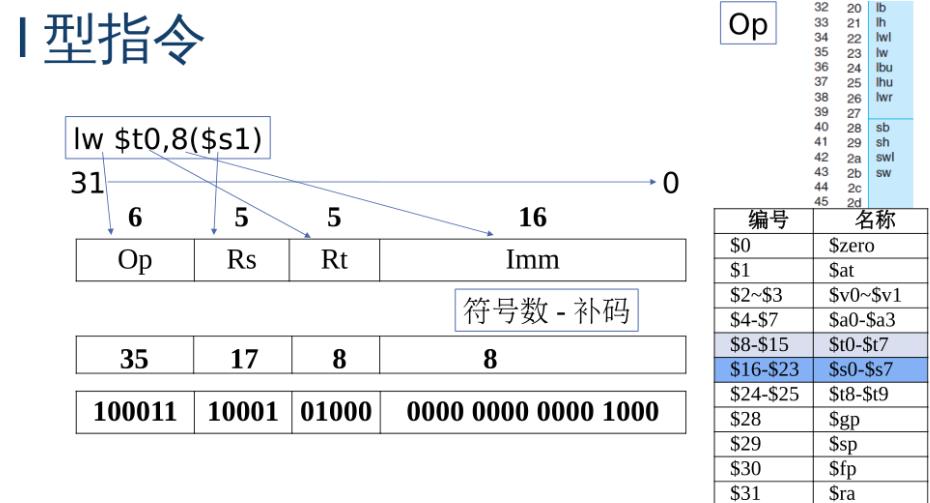
I型指令
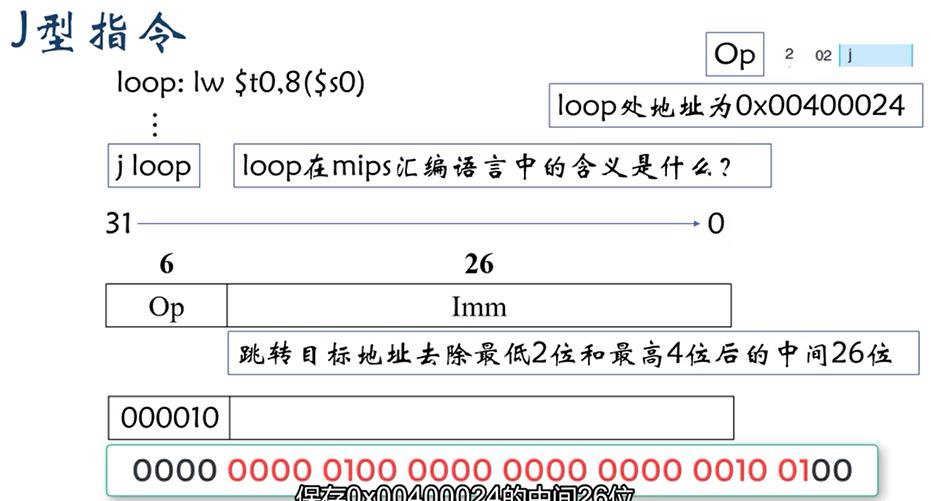
J型指令
小结
三种指令的编码形式如下图
6.MIPS常用汇编指令
数据传送指令
装载(Load)
指令格式如下
lx $Rt, Imm($Rs)
显然,装载指令是I型指令。指令中的lx,Rt,Rs,Imm分别与I型指令的各个域对应
lx并不代表真的有lx这个指令,在实际代码中,要被替换成lw,lh,lhu,lb,lbu等
lw指令将一个字的数据拷贝到寄存器。注意MIPS寄存器的左边储存数据的高位,存储器的低地址存放数据的高位
lh,lhu拷贝半字到寄存器。由于寄存器是32位,半字只有16位,所以二者需要分别进行有符号扩展和无符号扩展
有符号扩展是在高位补充符号位
无符号扩展是在高位补充0
例如,16位立即数0x8000,进行有符号扩展和无符号扩展得到如下结果
有符号扩展:0xFFFF8000
无符号扩展:0x00008000
lb,lbu拷贝字节到寄存器。同样要进行扩展,方式与上述一致
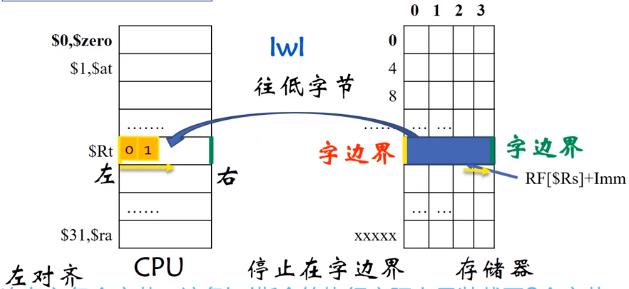
以上都是规则字的装载,下面来讲非规则字的装载。这种情况发生在地址不是4的整数倍的时候(针对MIPS架构大字节序)
lwl是左边界对齐非规则字访问。复制存储器中从高位到低位的数据,粘贴在寄存器的左边
lwr是右边界对齐非规则字访问。复制存储器中从低位到高位的数据,粘贴在寄存器的右边
举个lwl的例子。lwr与例子相反,就不举了
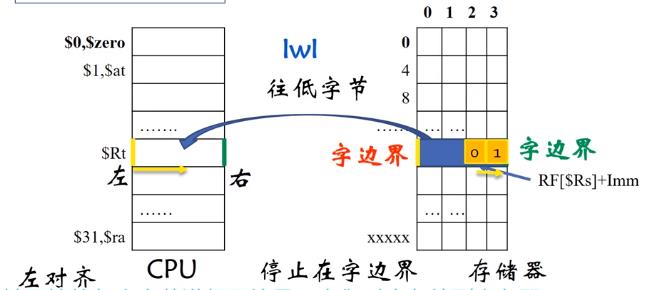
从高字节的0到低字节的1,依次复制到寄存器的左边。结果如下图
非规则字的装载可以和非规则字的存储配合使用,实现小字节序
存储(Store)
指令格式如下
sx $Rt, Imm($Rs)
存储指令和装载指令一样,都是I型指令
sx在实际代码中为sw,sh,sb
sw直接将寄存器中的一个字存到存储器,注意地址必须是4的整数倍
sh存半字,而且是低半字。因为高位是拓展而来的,不会影响数据的值
sb存字节,而且是低字节
存储指令中也有非规则字存储指令
swl是将寄存器中从左边界开始的值,以从高位到低位的方式存到存储器
swr是将寄存器中从右边界开始的值,以从低位到高位的方式存到存储器
swl与lwl过程相反,swr与lwr过程相反
举个swl的例子
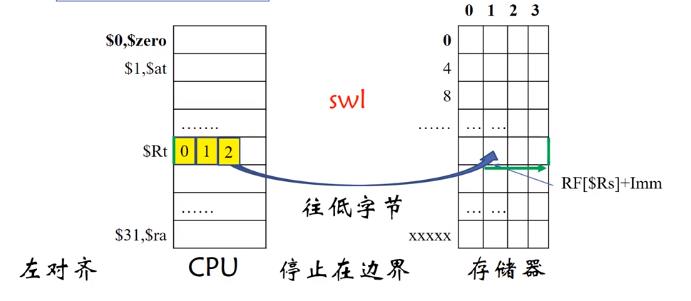
得到结果如下
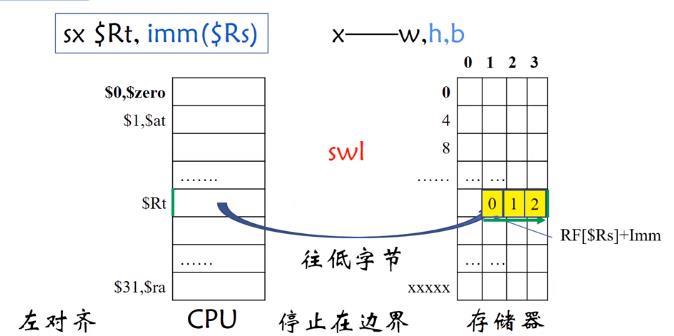
一句话概括非规则装载存储:装载是中间装到边界,存储是边界存到中间
特殊数据传输指令
- 特殊寄存器和通用寄存器之间数据互传
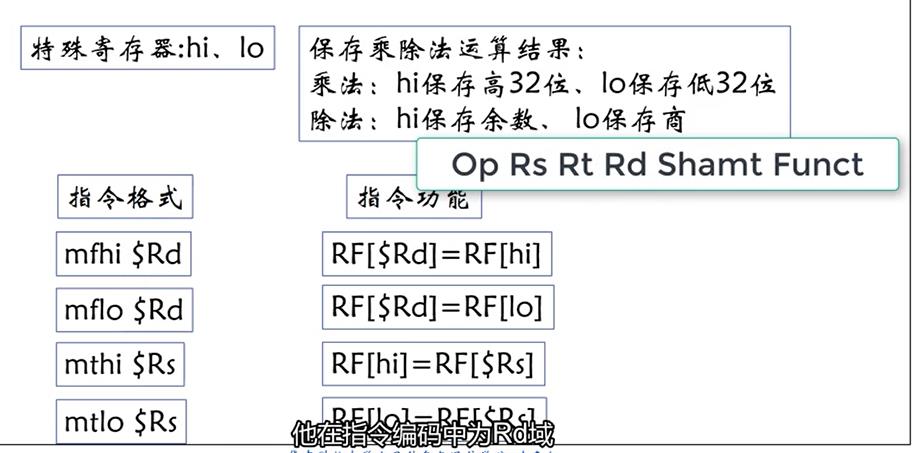
四条都是R型指令。$Rd,$Rs代表域
- 寄存器赋初值
代码如下
lui $Rt,Imm
这是I型指令,功能是把16位立即数赋给寄存器的高16位,低16位补0
代码的u不是无符号数的意思,而是高位(up)的意思
如何给寄存器赋32位值?需要用到后续课程的逻辑运算指令
算术运算指令
加减运算
先来看4条R型加减运算指令
add $Rd,$Rs,$Rt # 有OF作为溢出标志位
addu $Rd,$Rs,$Rt
sub $Rd,$Rs,$Rt # 有OF作为溢出标志位,运算结果是Rs的值-Rt的值
subu $Rd,$Rs,$Rt
还有2条I型加减运算指令
addi $Rt,$Rs,Imm #Imm是16位的,高16位补充符号位
addiu $Rt,$Rs,Imm #Imm是16位的,高16位充0
立即数参与的时候就没有减法了,因为只要加上一个负数就可以实现减法
乘法运算
mult $Rs,$Rt
multu $Rs,$Rt
乘法结果的符号由参与运算的数的符号决定,所以要区分有符号和无符号(乘法的实现比较复杂,这只是简单理解,想了解更多请看乘法电路)
乘法的结果保存在特殊寄存器中。高32位存在hi寄存器,低32位保存在lo寄存器中
想得到结果需要用到前文的mfhi,mflo等
除法运算
与乘法类似
div $Rs,$Rt
divu $Rs,$Rt
进行$Rs/$Rt的运算,结果保存在特殊寄存器中。余数存在hi寄存器,商存在lo寄存器中
位运算指令
位逻辑运算指令
先讲与、或、或非、异或四类运算,这里都是位逻辑运算
逻辑运算的具体功能请参考《数字电路》课程
可以通过或非0,异或1,实现非运算
and $Rd,$Rs,$Rt #Rs和Rt位与,结果存到Rd
andi $Rd,$Rs,Imm #Imm是16位的,高16位充0后再和Rs位与
or $Rd,$Rs,$Rt #或运算
ori $Rd,$Rs,Imm #Imm是16位的,高16位充0
xor $Rd,$Rs,$Rt #异或运算
xori $Rd,$Rs,Imm #Imm是16位的,高16位充0
nor $Rd,$Rs,$Rt #或非运算,注意没有nori指令
移位指令
还有一类移位指令,分为逻辑移位和算术移位
# 逻辑移位指令,移入0,都是R型指令,Imm存在移位域
sll $Rd,$Rt,Imm #逻辑左移Imm
srl $Rd,$Rt,Imm #逻辑右移Imm
sllv $Rd,$Rs,$Rt #逻辑左移,移动的位数是$Rt的值
srlv $Rd,$Rs,$Rt #逻辑右移,移动的位数是$Rt的值
# 算术移位指令,移入符号位,都是R型指令,Imm存在移位域
# 没有算术左移,因为左移会丢失符号位
sra $Rd,$Rt,Imm #算术右移Imm
srav $Rd,$Rs,$Rt #算术右移,移动的次数是$Rt的值
程序控制指令
在学这部分知识前,我们先要复习以下几个知识:
1.MIPS指令都是32位的,即4个字节,即1个字
2.MIPS架构的存储器要求边界对齐,字的存放的首地址必须是4的整数倍,也就是地址的最低两位是0
3.指令存放在存储器中,且是顺序存储。在程序中相邻的指令在内存中也相邻
4.PC寄存器指向下一条指令的地址
5.在无跳转指令时,程序依靠PC寄存器依次+4来顺序执行指令;实现跳转的关键是改变PC寄存器的值
相等条件控制指令
有beq和bne两条指令,都是I型指令
beq $Rs,$Rt,label # $Rs,$Rt相等时跳转到label
bne $Rs,$Rt,label # $Rs,$Rt不相等时跳转到label
label是程序前的标号,代表指令的地址。实际上是一个常数,存在Imm域
label实际上保存的是相对地址,即label-PC再右移两位的低16位。结果是一个符号数,正数往后跳,负数往前跳
原因是地址的最低两位是0,没必要存。剩下的从低到高存16位。可见这两条指令的跳转有范围限制
无条件控制指令
只有一条j指令
j label # 无条件跳转到label
J型指令的Imm域是26位的。实际上,保存的是label的去除高4位和低2位的中间26位
j指令的跳转也是有限的,跳转到的指令的地址高4位必须和PC一样
大小条件控制指令
与0比较

满足条件时,跳转到label
与非0比较
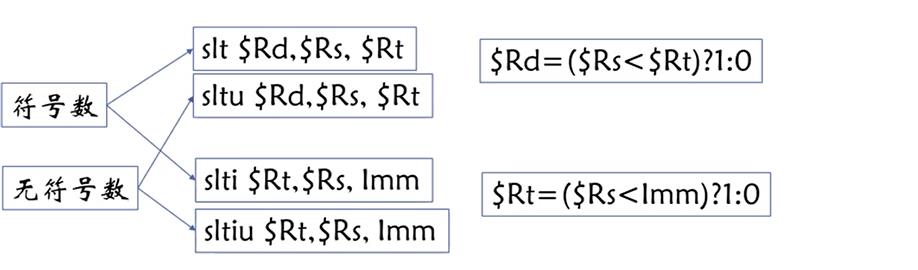
满足条件时,会给第一个寄存器操作数置1
再结合beq和bne指令,实现跳转
7.子程序原理
子程序调用和返回
子程序调用的过程实际上是main函数向sub函数跳转的过程
调用子程序时,采用jal指令,这是一条J型指令
格式如下,label为标号
jal label
使用jal指令时,会将PC寄存器中的值暂存到$ra寄存器
函数调用结束后,使用jr指令就可跳转回主程序,这是R型指令,格式如下
jr $ra
调用子程序时,依次使用$a0-$a3寄存器保存入口参数。使用$v0-$v1寄存器保存返回值
栈
数据进出遵循先进后出原则
出栈:先取出数据,再改变栈顶指针
入栈:先改变栈顶指针,再存入数据
$sp指示栈顶
$fp指示当前子程序可操作的栈的栈顶
8.MIPS寻址原理
寻址是指处理器获得数据和指令的存储地址
操作数寻址:获取操作数的方式
1.寄存器寻址。例如指令
add $Rd,$Rs,$Rt,操作数在寄存器中
2.基址寻址。例如指令lw $Rt,(Imm)$Rs,地址由基地址和偏移地址组成
3.立即寻址。例如指令addi $Rt,$Rs,Imm,操作数来自指令中的立即数
指令寻址:获取下一条指令存储地址的方式
1.寄存器间接寻址。例如指令
jr $Rs,PC来自寄存器
2.PC相对寻址。例如指令beq $Rs,$Rt,label,新PC的值和原PC的值相关
3.伪直接寻址。例如指令j label,新PC的值基本来自指令
9.编译、汇编、链接、装载
c语言程序经过编译,成为汇编语言程序
汇编语言程序经过汇编,成为目标文件
目标文件经过链接,成为可执行文件
可执行文件装载到内存中运行
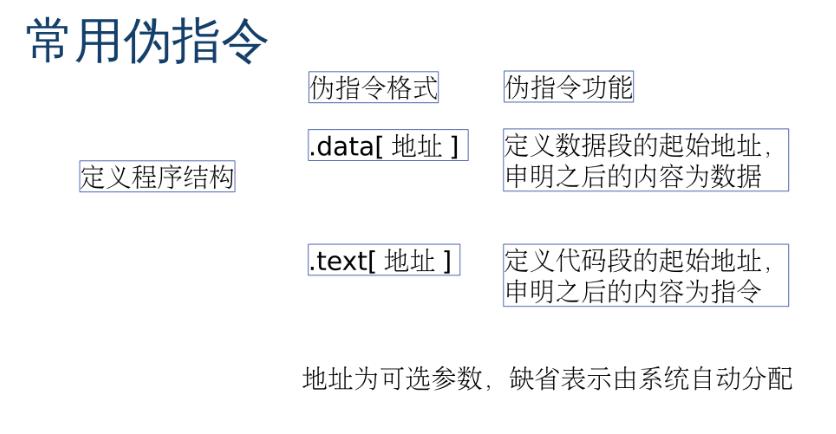
10.伪指令、宏指令和系统功能调用
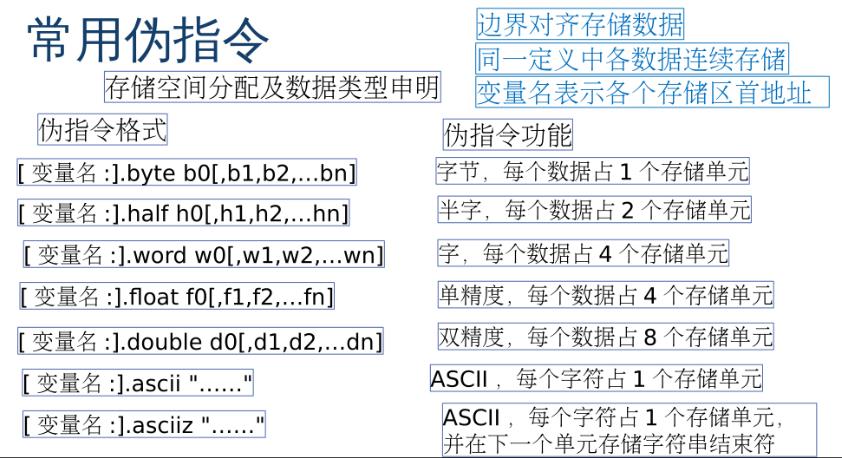
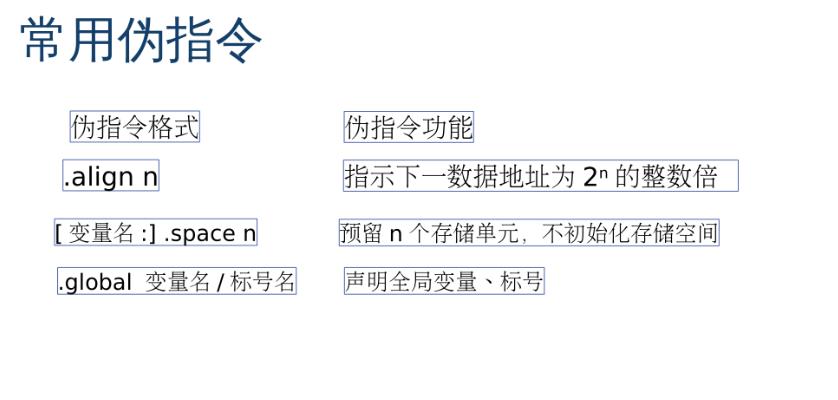
伪指令
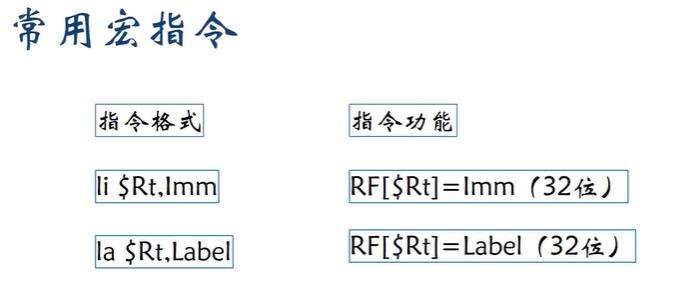
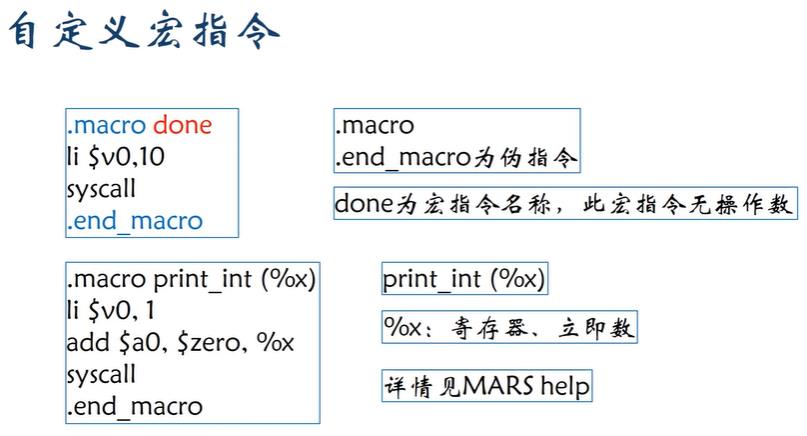
宏指令
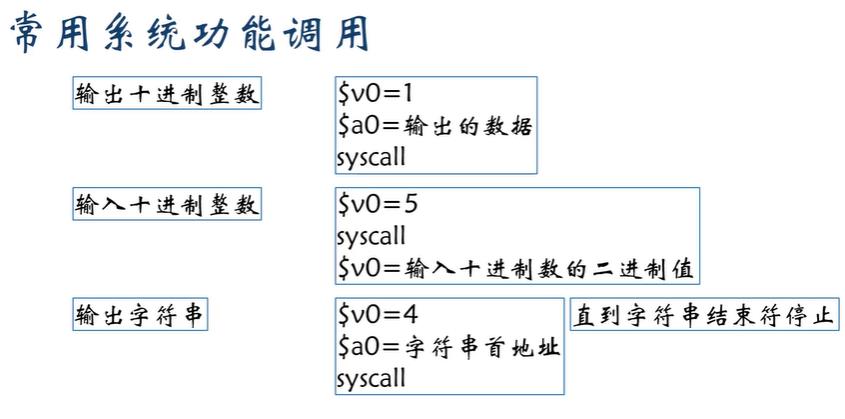
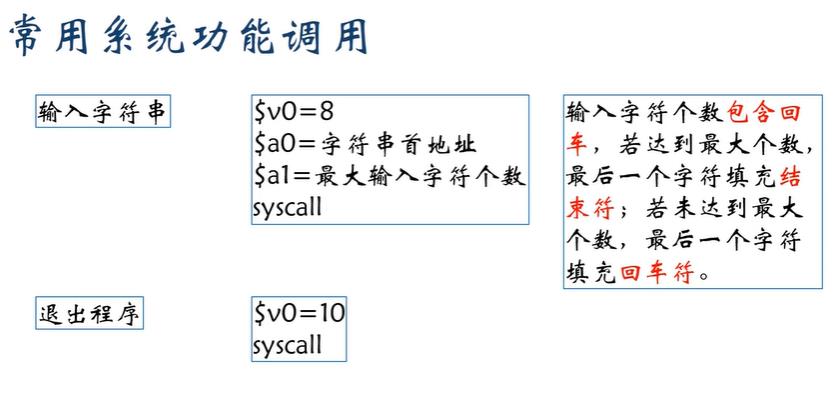
系统功能调用
系统功能调用由系统软件提供,作用为屏蔽不同特定硬件的具体操作,作为硬件抽象层。
第三章 微处理器
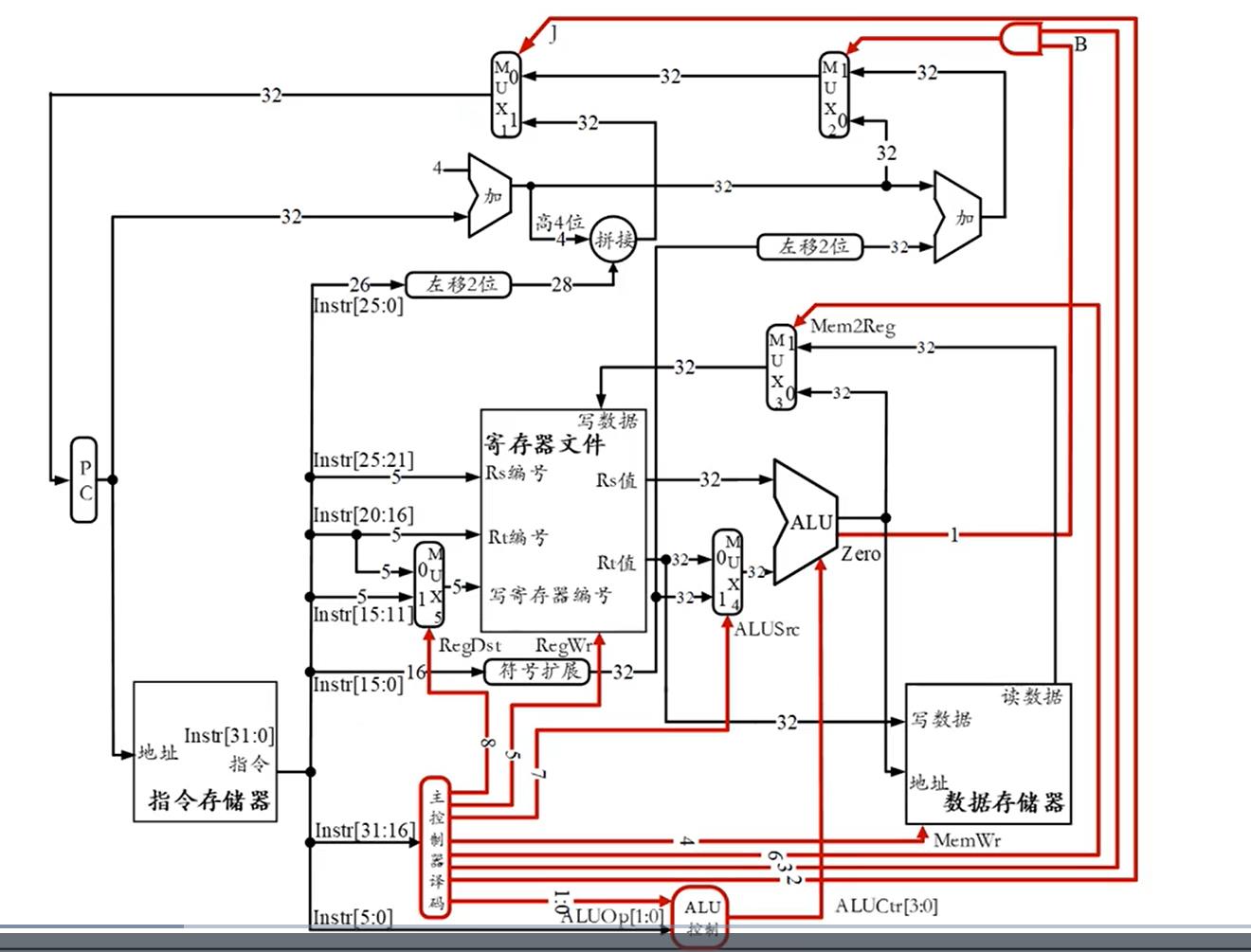
数据通路和控制信号如图所示
1.控制器
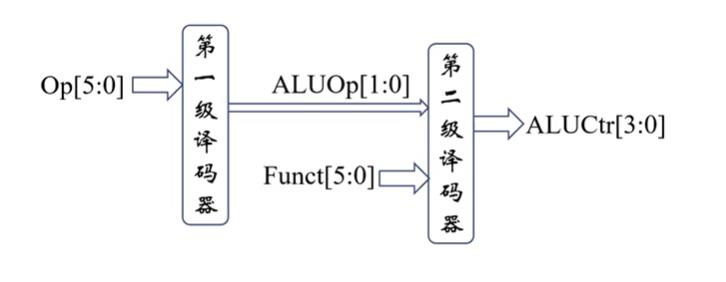
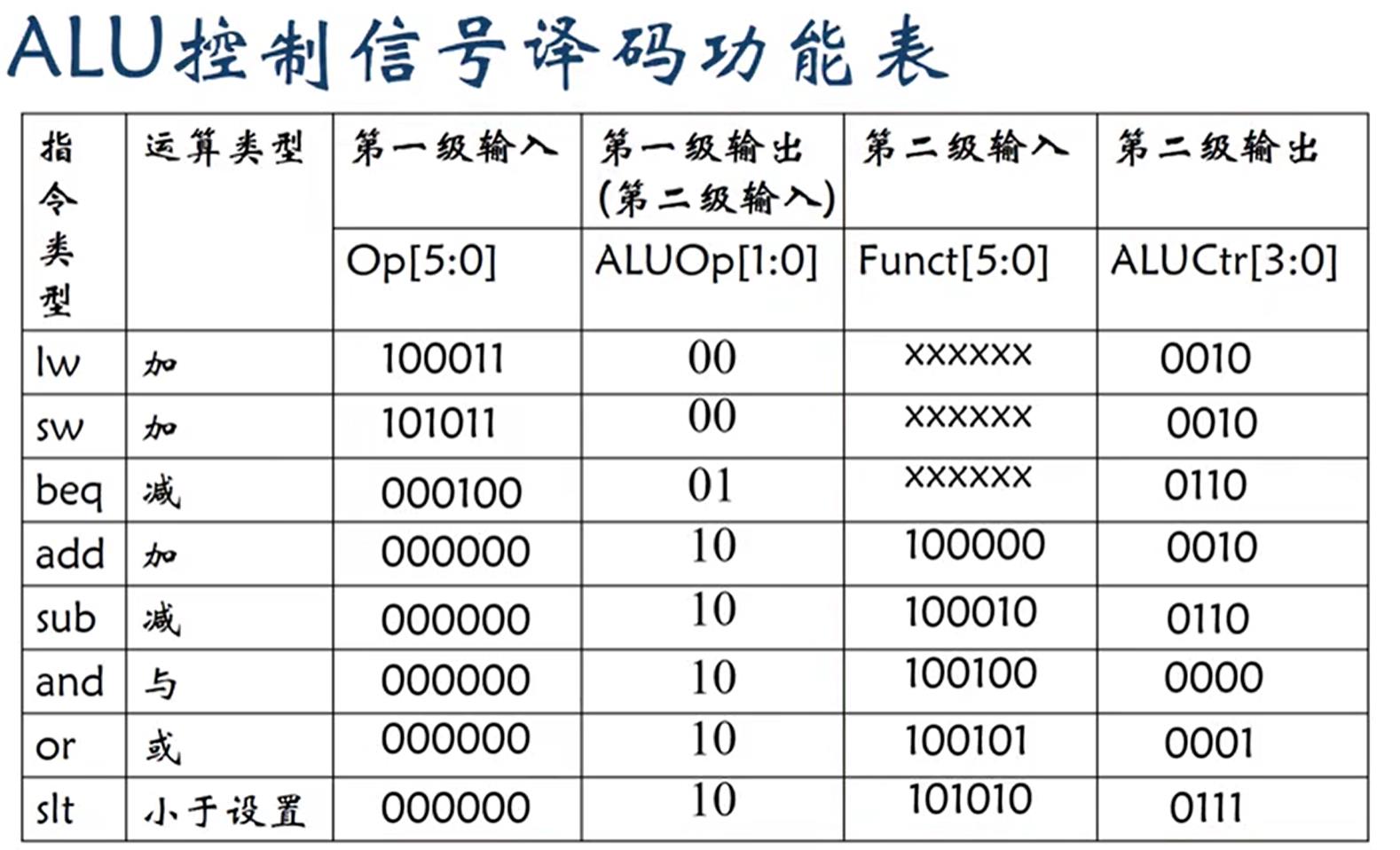
ALU控制信号
通过两级译码,来确定ALU执行哪种运算。
如果是I型指令,操作码就可以确定运算类型;如果是R型指令,操作码译码后还需结合功能码,进一步译码来确定运算类型
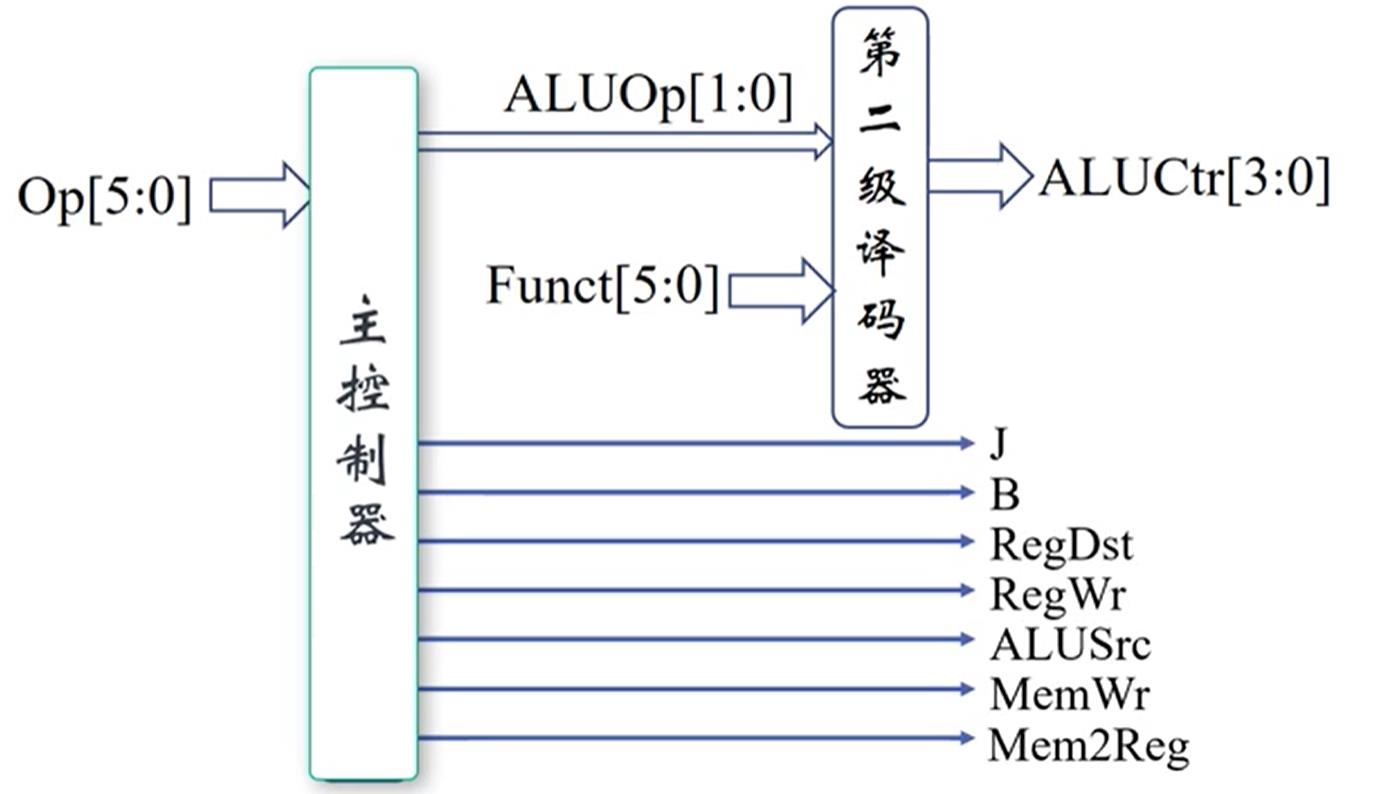
主控制器
以下是控制信号和它们的具体含义

RegDst控制写寄存器的编号
RegWr和MemWr是寄存器和存储器的写控制信号
ALUSrc控制ALU的第二个数据源是立即数还是寄存器
Mem2Reg控制写入寄存器的数据的来源是存储器还是ALU运算的输出
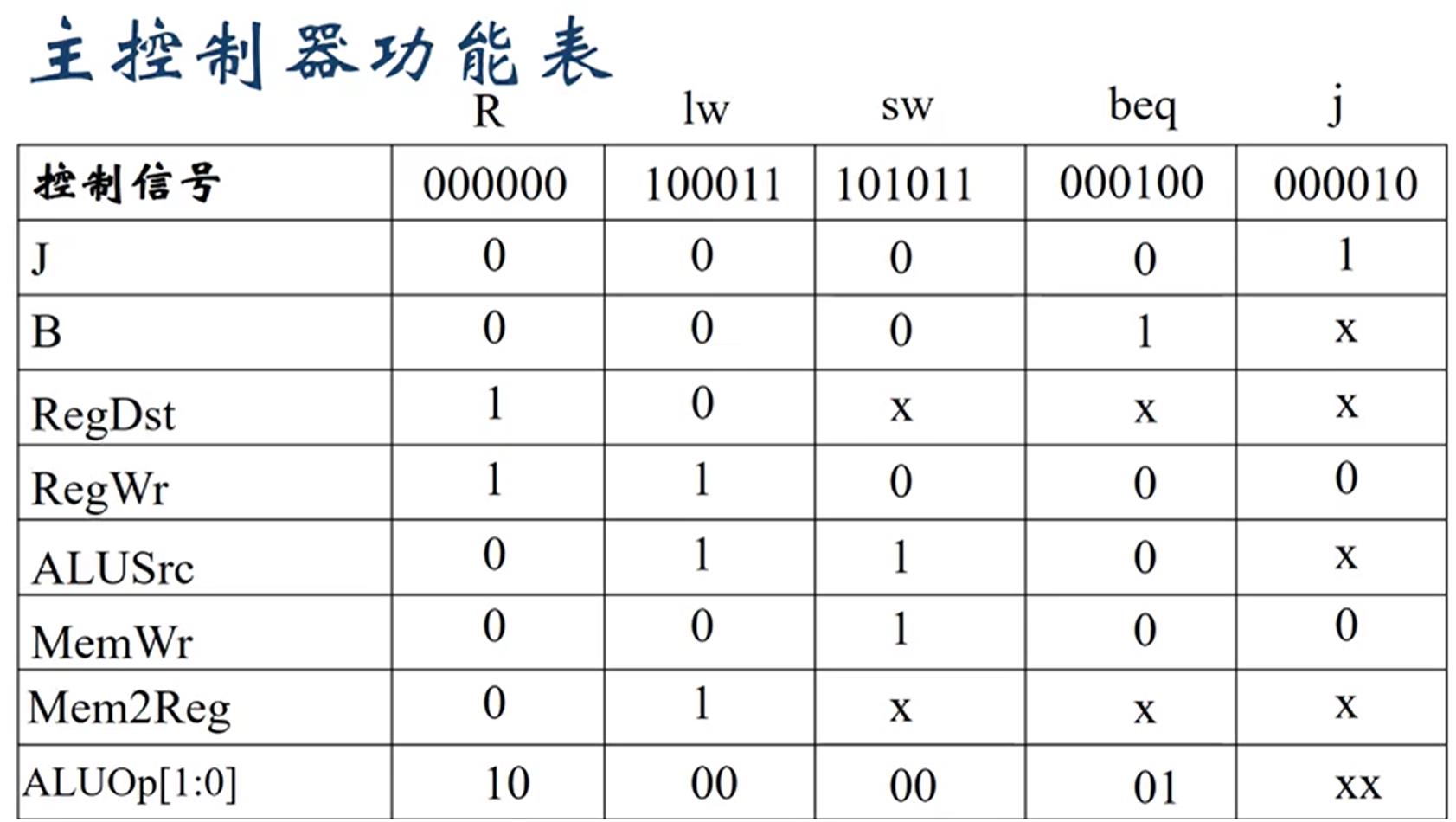
这些控制信号由指令的操作码译码而来,如图所示
以下是各条指令的各个控制信号的取值
2.现代微处理器新技术
流水线、超标量和多核
3.异常处理
被中断时,进入中断程序前需要保存PC的值。用栈或者特殊功能寄存器MIPS EPC
中断技术一章中详细学习
第四章 存储系统
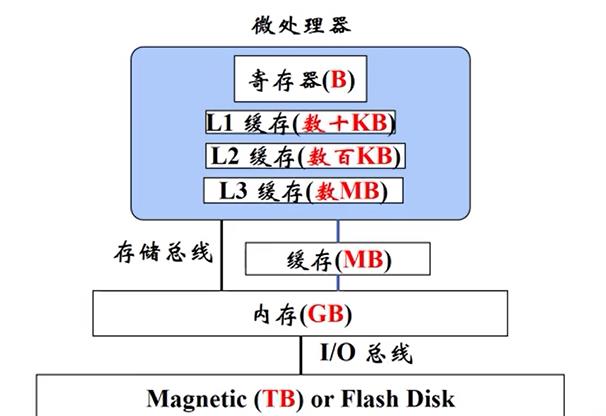
1.分级存储结构
时间局部性:刚刚访问的存储区域又马上访问
空间局部性:访问刚刚访问的存储区域的相邻区域
存储器的发展基本跟不上CPU的脚步。速度快的存储器价格太贵,便宜的存储器速度太慢
计算机内采用分级的存储结构提高效率,如下图
2.高速缓存
如果将经常使用的数据或指令装载到高速缓存中,就可以提高速度
cache的容量小于内存,不可能把所有的数据都装进cache。故需要建立一种映射机制,也就是说cache数据和内存数据的对应关系
cache映射机制
这里有三种映射机制,分别是直接映射(一路组相联)、全相联映射、组相联映射
参考:https://blog.csdn.net/l_nan/article/details/78883996
cache写策略
CPU写缓存时,有以下几种方式
1.透写:既写缓存,也写内存
2.回写:只写缓存,当需替换时再写入内存
3.配写:写内存后,再拷贝到缓存
4.不配写:仅写内存
1和3配合使用;2和4配合使用
3.虚拟存储器
将外存当作内存使用
管理方式有分段管理和分页管理
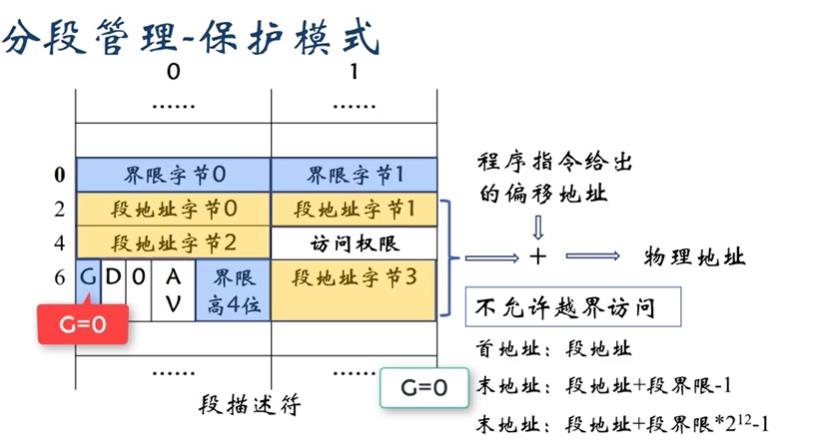
分段管理
从虚拟空间装载一段数据到物理空间时,是连续装载的,偏移地址是一样的。因此要得到物理地址,只需要记录段的首地址,即段地址。
保存段地址的方式有两种:
1.用专用寄存器来保存。称为实模式
2.用内存中的段地址描述符保存。称为保护模式
以下是段地址描述符的结构
分页管理
把内存和外存分为大小相同的页,以页为单位装载
页表存储在内存中,页表的索引是虚拟地址,值是物理地址
可以建立多级页表,索引是虚拟地址的一部分,数据是下一级页表的地址
TLB
把页表存进高速缓存(全相联映射),提高查找的效率
第五章 总线
1.总线分类
按位置分
片内总线:微处理器内部的总线,如AXI总线
系统总线:连接计算机系统各个模块的总线,通常在服务器上使用
局部总线:专门针对某些类型的设备设计的总线,如PCI总线、PCIE总线
外部总线:连接外部设备的总线,或称为外部接口,如USB\\UART\\SATA\\SPI\\IIC
按定时分
同步:SPI\\IIC
异步:USB\\UART\\SATA
半同步:AXI\\PCI
按数据传输方式分
并行:片内总线、系统总线、局部总线一般是并行。如AXI\\PCI
串行:目前外部总线一般采用串行。局部总线PCIE是串行
按是否复用方式分
复用:所有串行总线都是复用的。也有并行总线采用复用,如PCI
专用:AXI总线
2.总线操作类型
写操作:主设备传到从设备
读操作:从设备传到主设备
3.AXI总线
4.PCI总线
并行
5.外部总线
目前,外部总线一般都是串行总线
异步串行的外部总线USB\\UART\\SATA的特点如下
同步串行的外部总线SPI\\IIC的特点如下
第六章 半导体存储器接口
1.常见半导体存储器
2.容量扩展
3.空间映射
4.多类型数据访问
5.存储控制器

第七章 IO接口
1.IO寻址
分为存储器映像IO寻址和独立IO寻址
前者将IO接口映射到逻辑存储空间,相当于存储器;后者访问IO接口时需要提供独立的控制信号,不占用逻辑存储空间
前者主要用于嵌入式系统,后者主要用于PC机
2.IO读写操作函数
介绍Standalone BSP端口读写C语言函数
Xil_In8(addr) # 从addr读入8位数据
Xil_In16(addr) # 从addr读入16位数据
Xil_In32(addr) # 从addr读入32位数据
Xil_Out8(addr,value) # 向addr输出8位数据
Xil_Out16(addr,value) # 向addr输出16位数据
Xil_Out32(addr,value) # 向addr输出32位数据
3.常见IO设备接口设计
输入设备与总线相连接时需要缓冲器,如74**244
输出设备与总线相连接时需要锁存器,如74**373
开关和LED灯
这部分比较简单,就不记了
矩阵键盘
电路及控制程序如下
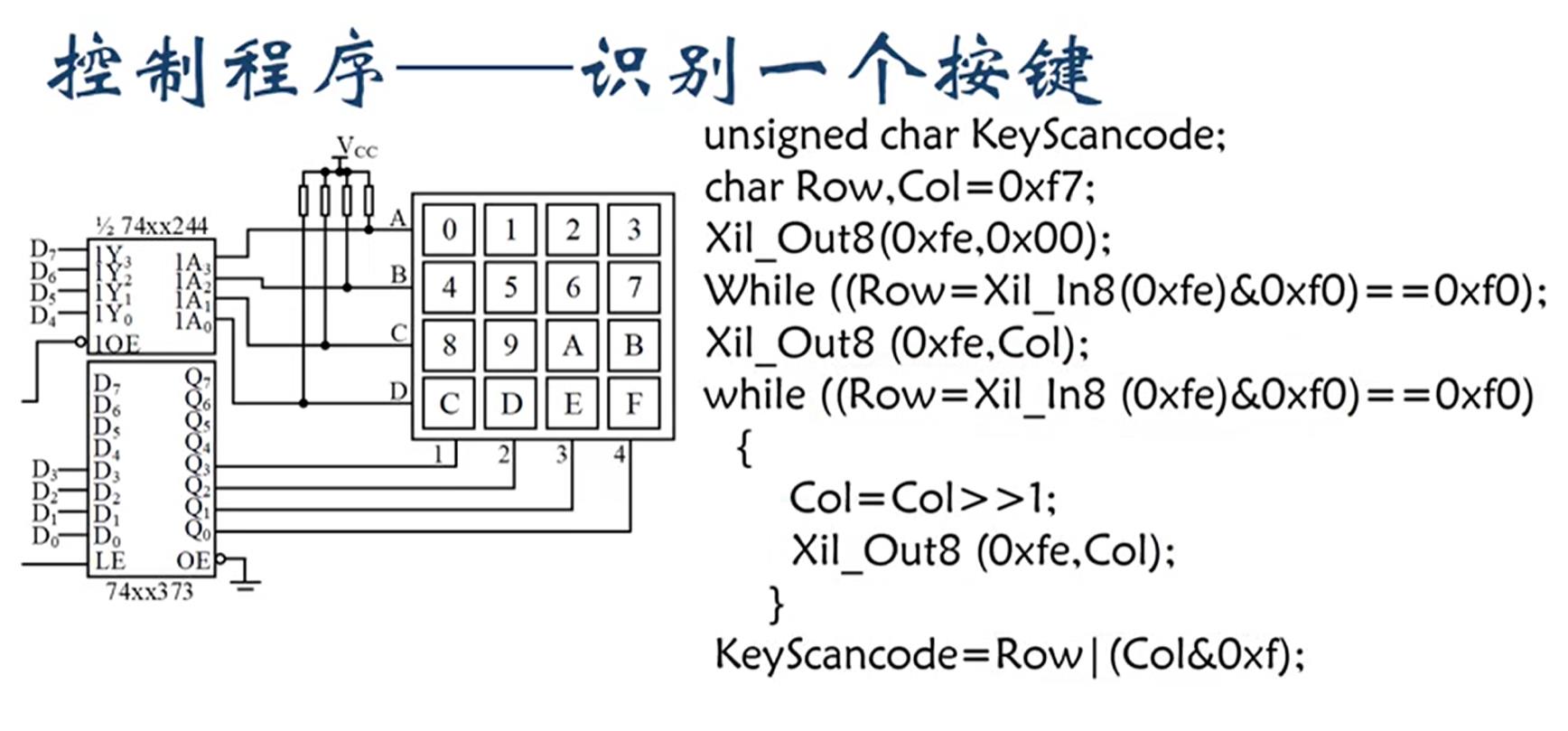
要识别一个按键,首先要判断是否有按键按下。如果没有按键按下,程序将在第一个while处死循环。当有按键按下时,ABCD引线会出现低电平。接下来逐列扫描,确定扫描码
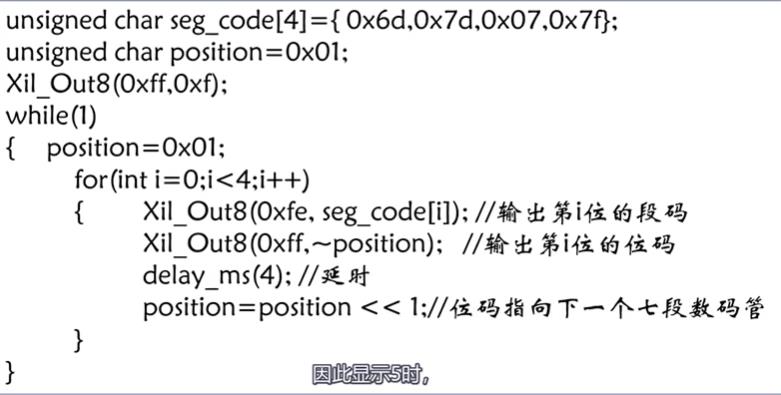
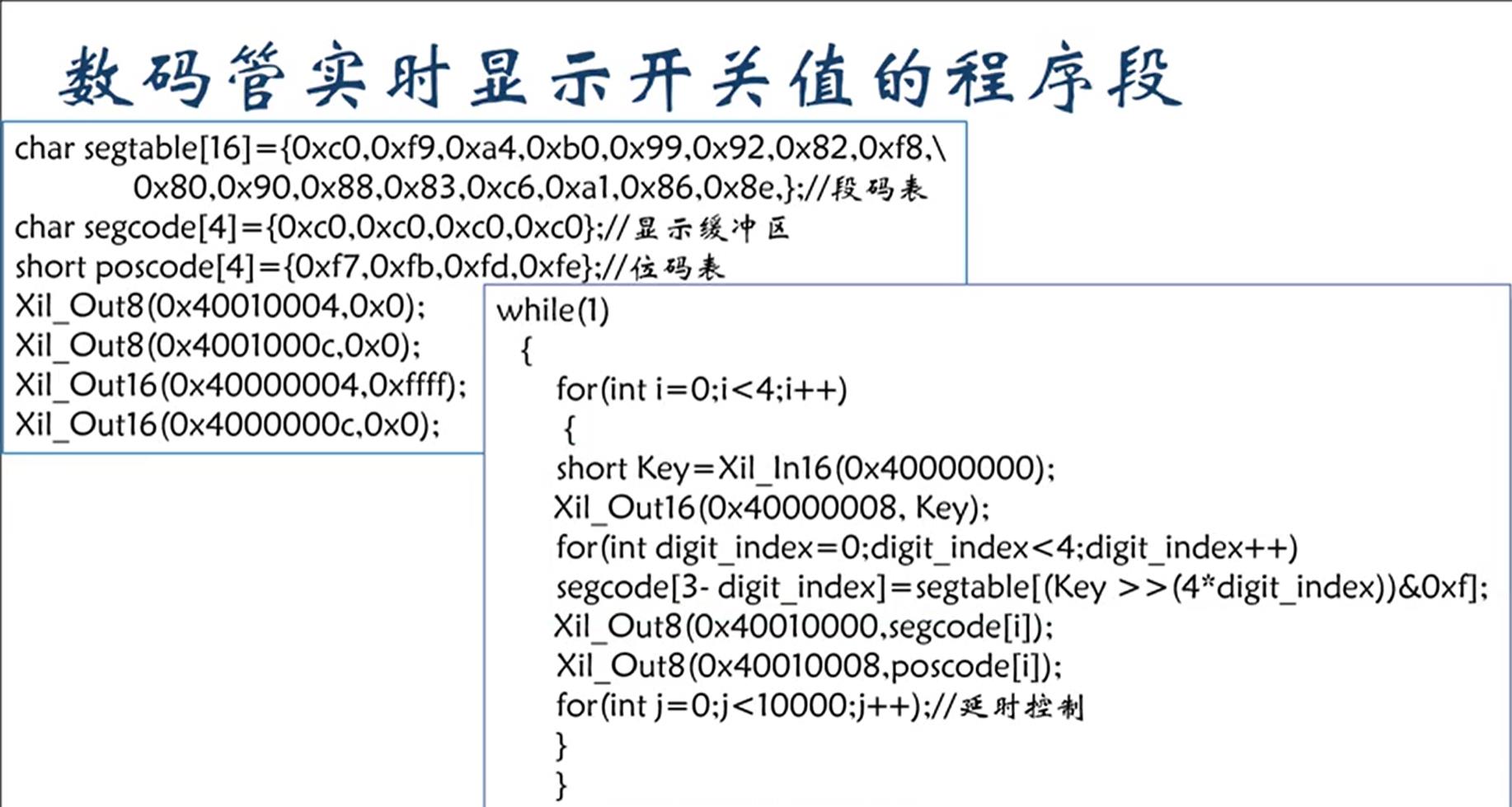
七段数码管
四个七段数码管接口电路如下
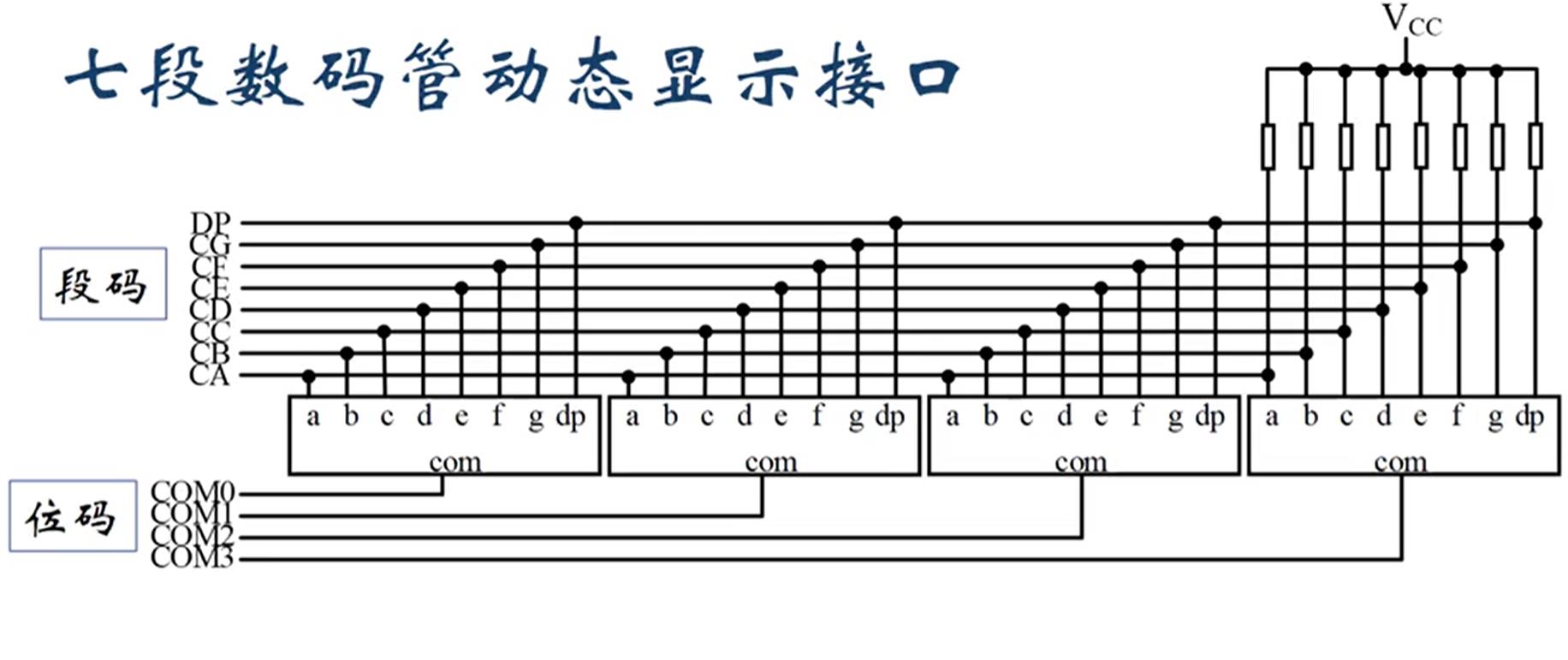
输出位码,即可选中对应的数码管;然后再输出段码,即可点亮该数码管
显示5678的程序如下
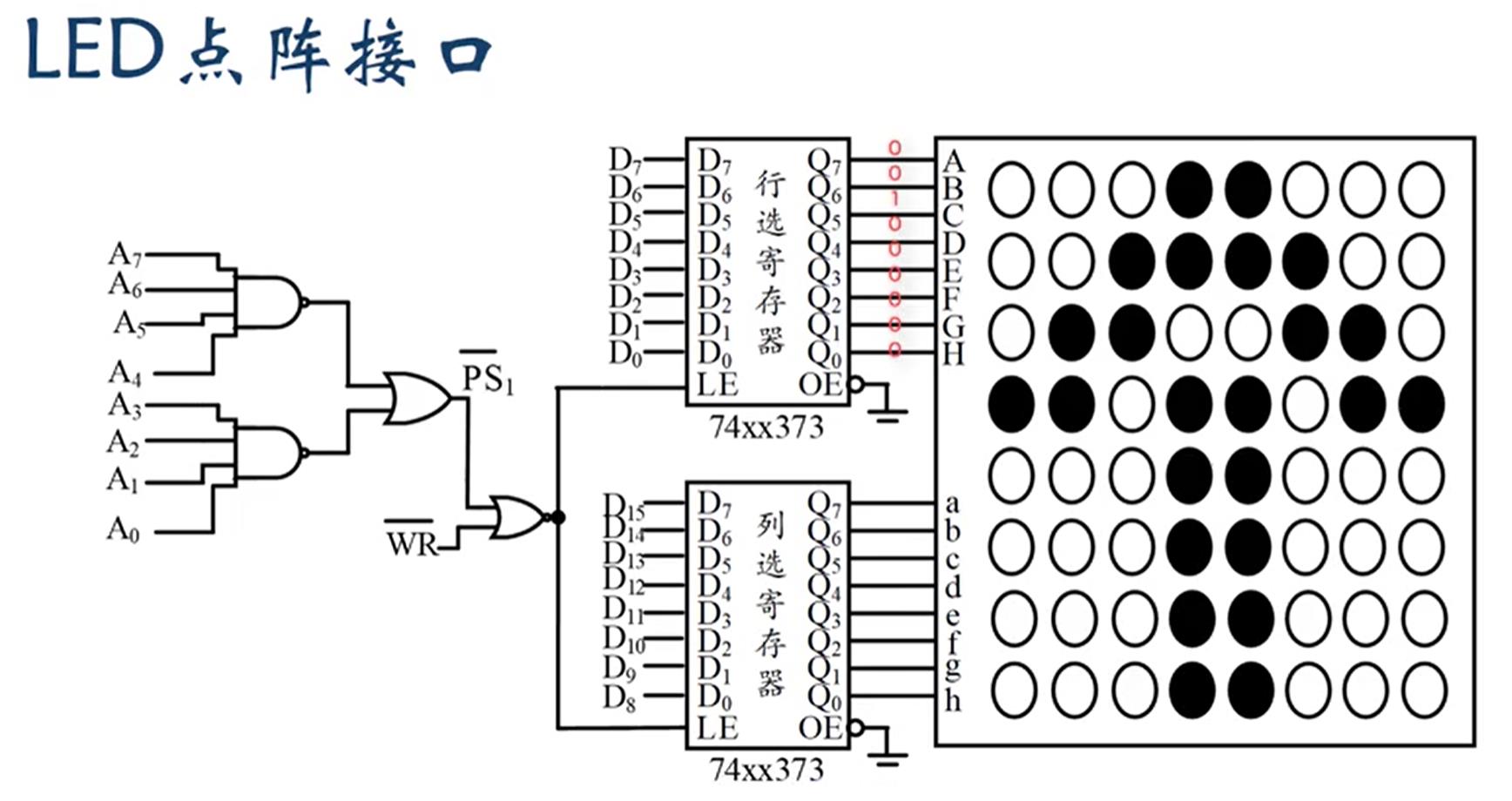
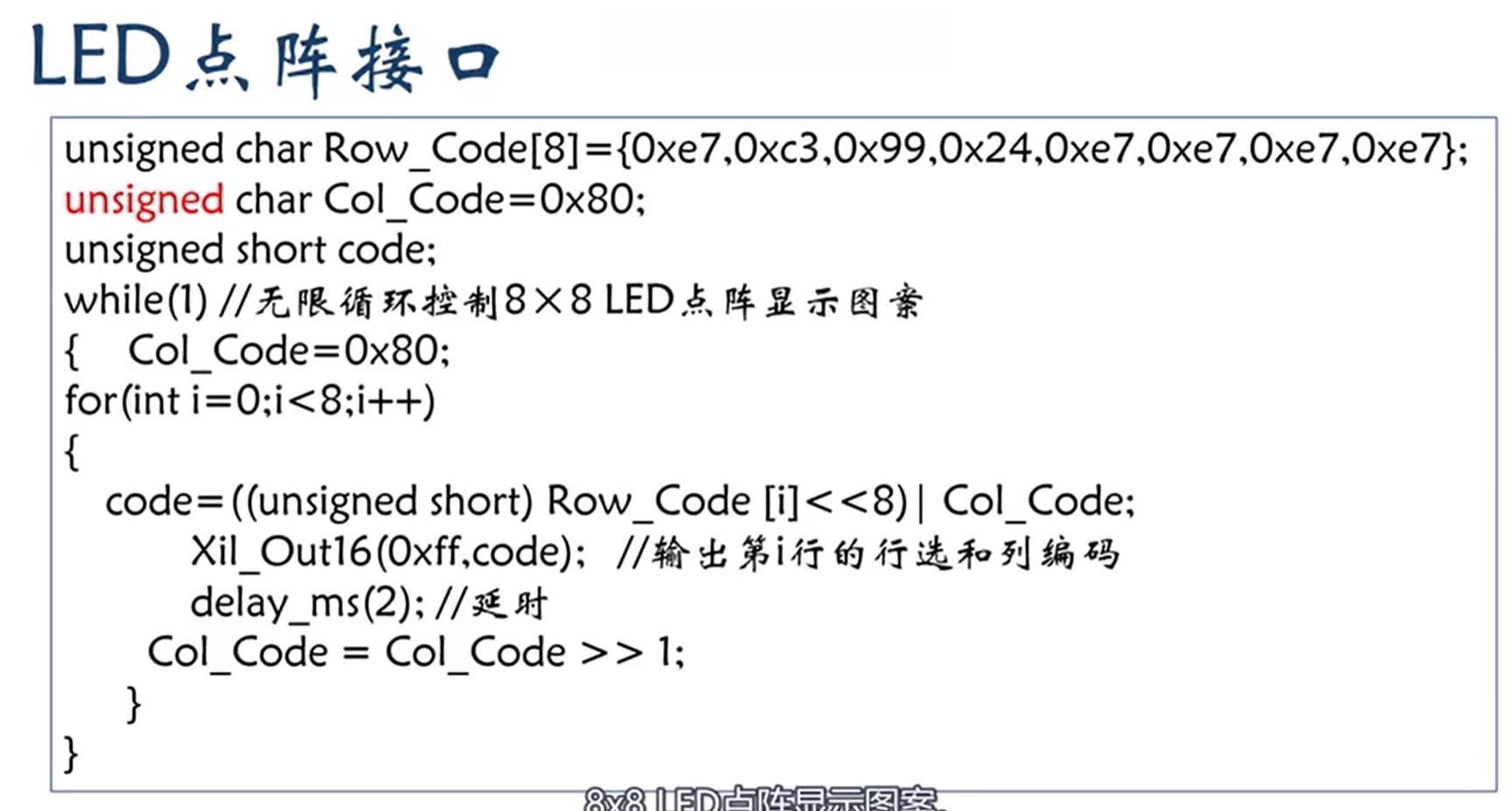
LED点阵
行输出1,列输出0时,对应位置LED被点亮。接口电路和控制程序如下
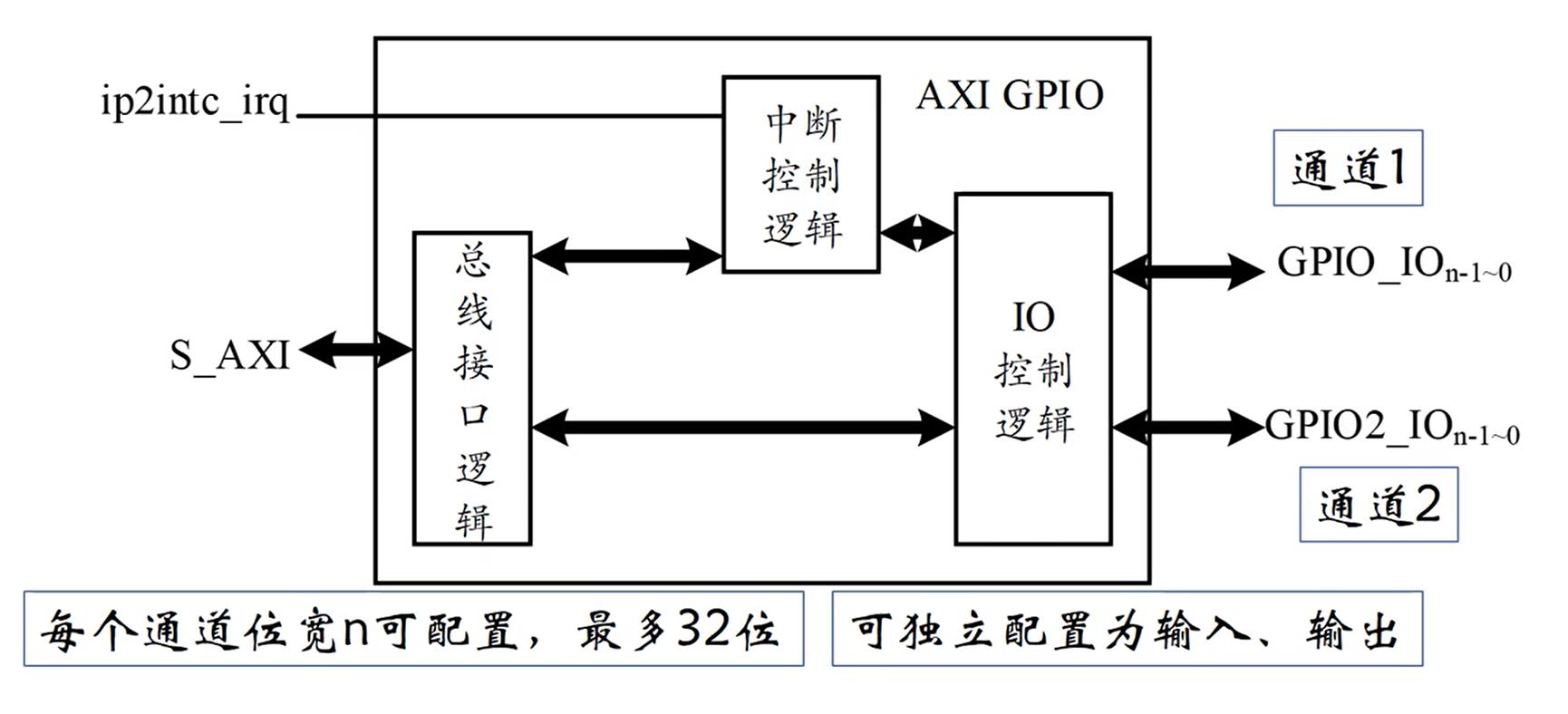
4.GPIO
接口电路和寄存器含义如下

例题:设计控制程序,将16位开关实时反应到16位LED上,且16位开关表示的二进制数以十六进制形式显示在4位七段数码管上
第八章 中断技术
1.中断控制器
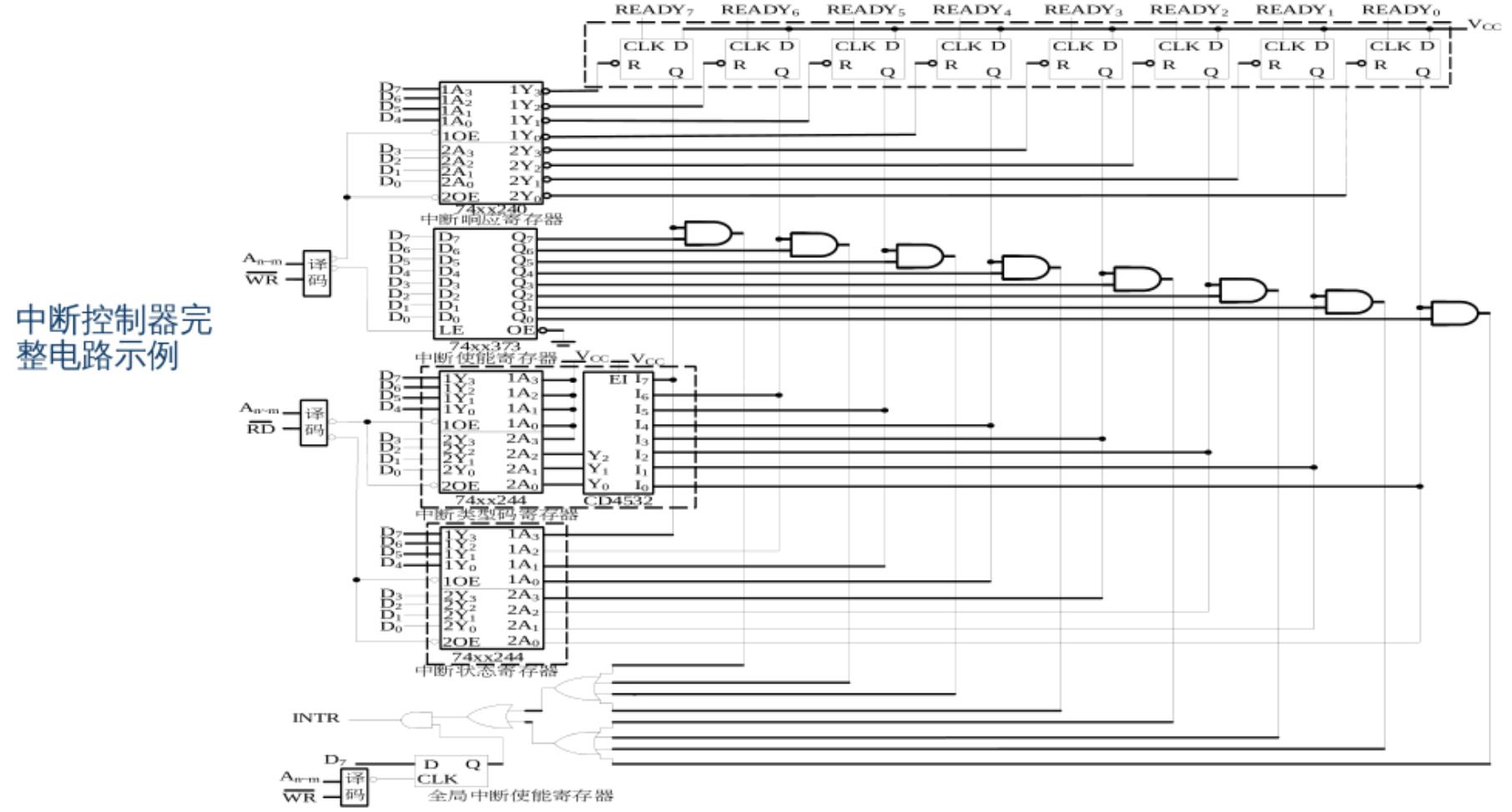
中断控制器应该具有以下部分
1.中断状态寄存器:用来指示是哪一个设备产生中断
2.中断响应寄存器:响应后,用来清除中断状态
3.中断使能寄存器:使能中断
电路如下
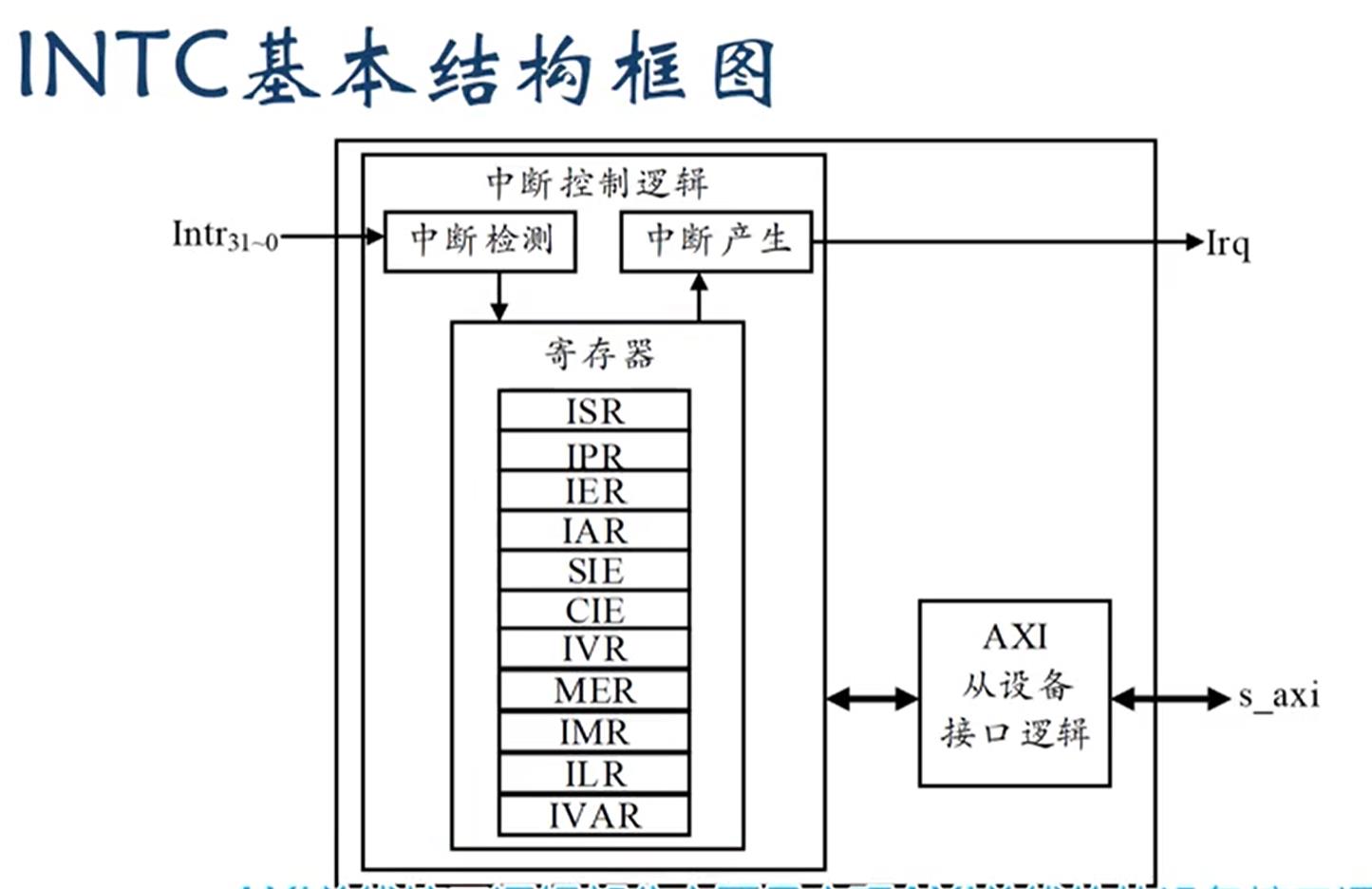
2.AXI INTC中断控制器
结构和寄存器含义如下图
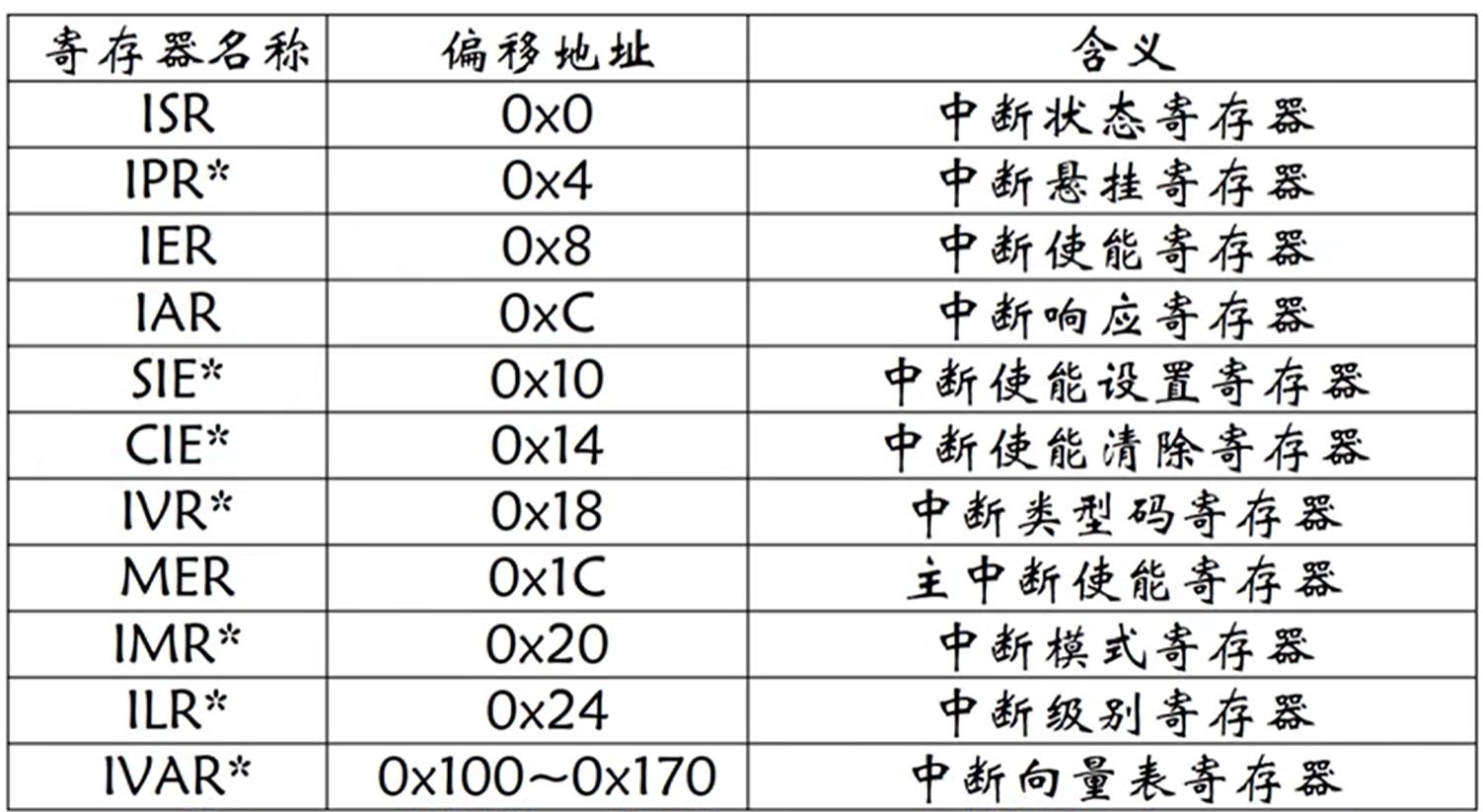
ISR为中断状态寄存器,某位为1时,表示对应位产生了中断
IER为中断使能寄存器,某位为1时,使能对应位中断输入
IAR为中断响应寄存器,某位为1时,清除对应位中断
IMR为工作模式寄存器,某位为0时,标志工作在普通中断模式;为1时,标志工作在快速中断模式
IVR保存最高优先级中断源的编码,intr0的优先级最高,intr31优先级最低。如果intr2产生中断,而intr0和intr1没有中断,则IVR的值为0x2
MER寄存器仅两位。D1=1表示使能硬件中断。D0=1表示允许Irq产生中断请求
ILR寄存器保存阻止的最高优先级中断源的编码。如果ILR=0x3,表示阻止intr3到intr31产生中断
IVAR寄存器共有32个寄存器,每个寄存器4B,保存各个中断源的中断向量
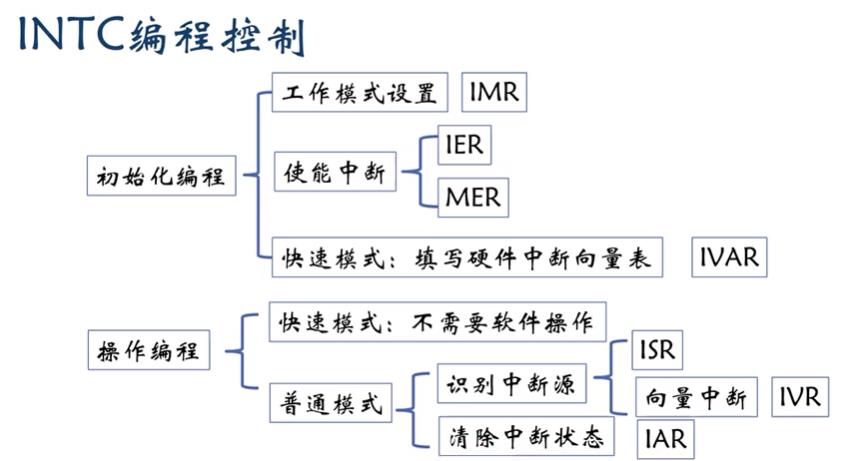
3.INTC编程控制
4.c语言中断方式程序设计
microblaze_enable_interrupts();//微处理器开中断
microblaze_disable_interrupts();//微处理器关中断
void name() __attribute__((interrupt_handler));//注册总中断服务程序,用于普通中断
void name() __attribute__((fast_interrupt));//用于快速中断
5.普通中断方式应用
鸽了
6.快速中断方式应用
鸽了
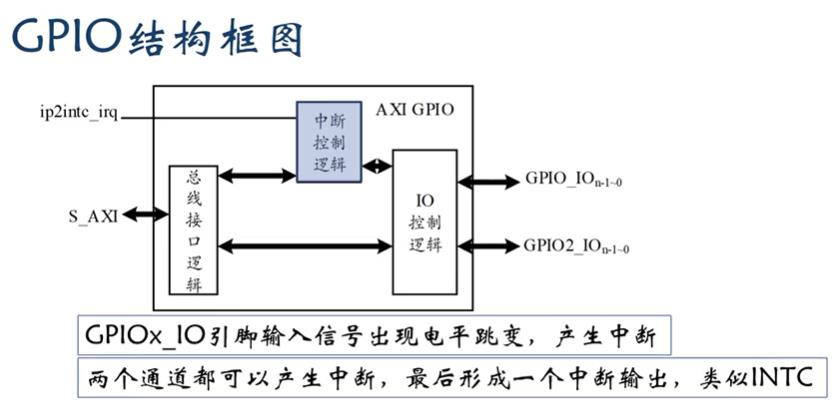
7.GPIO中断
结构
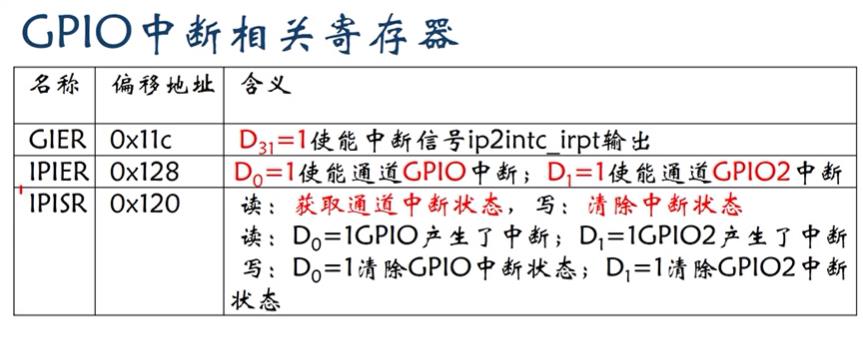
相关寄存器
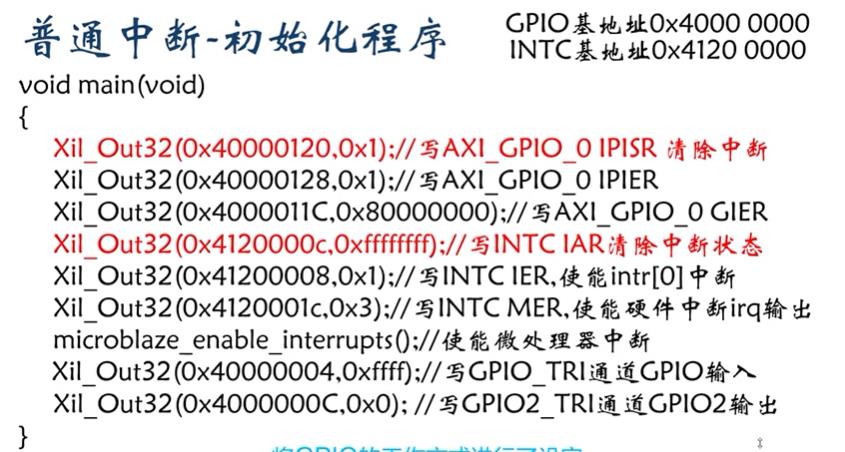
初始化程序(普通中断)
清除中断状态。写GPIO的IPISR寄存器和INTC的IAR寄存器
开放中断。写GPIO的GIER和IPIER寄存器开放GPIO中断;写INTC的IER,MER和IMR寄存器,开放INTC中断并设定工作模式;开放微处理器的中断
注册中断服务程序
配置GPIO的工作方式。写GPIO_TRI寄存器
中断服务程序(普通中断)
1.识别中断源,执行对应的中断事务处理函数
2.返回前需要清除GPIO和INTC的中断状态
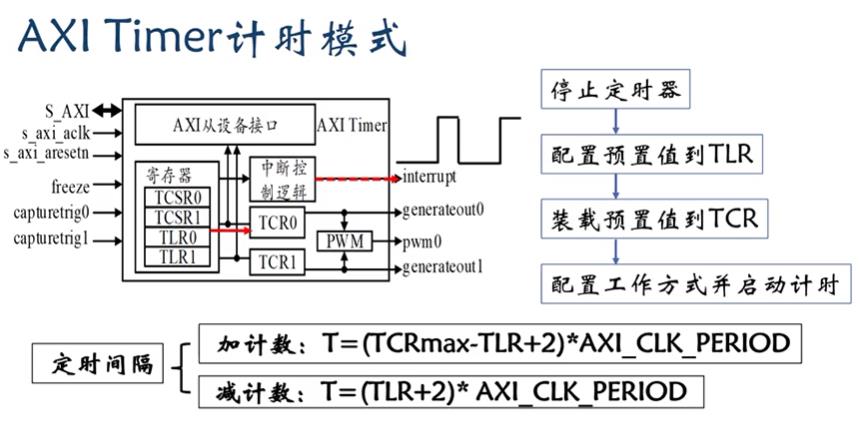
8.AXI Timer定时器
以下是定时器的结构和寄存器
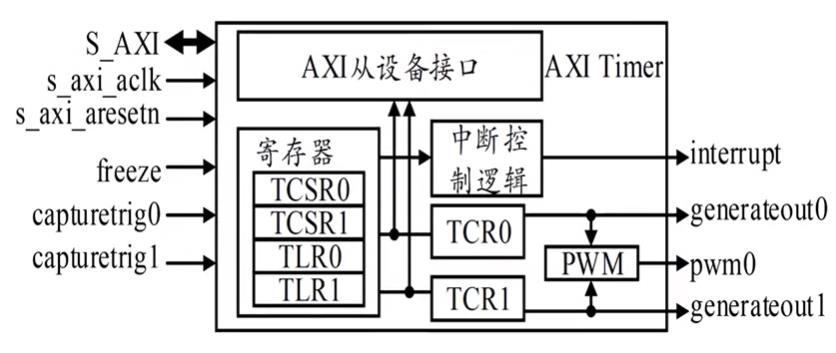

以下是TCSR的各位的含义

定时器的计时模式过程如下
9.SPI接口
SPI是同步串行总线接口
MOSI传输方向为主设备到从设备;MISO传输方向为从设备到主设备
选中从设备时,从设备选择信号ss为低电平
CPOL表示从设备空闲时的始终电平
CPHA表示时钟相位,0为0度,1为180度。第一个时钟边沿为相位0度,第二个时钟边沿为相位180度。
第九章 DMA技术
1.DMA传输系统构成
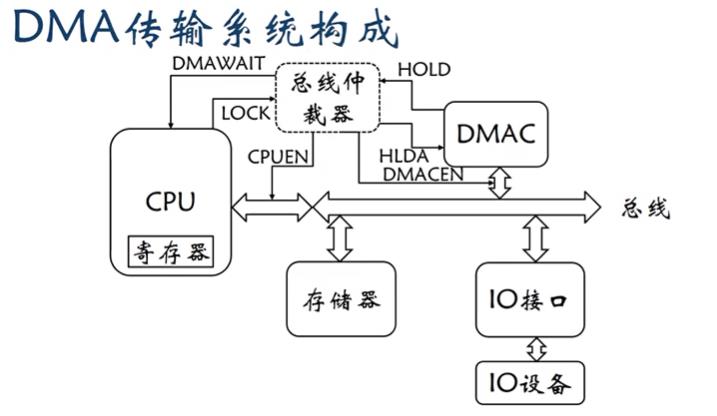
2.DMA传输分类
IO到存储器
存储器到IO
存储器到存储器(DMAC内部有FIFO存储器)
3.DMA传输模式
单字节模式:DMA传一个字节释放总线
块传输模式:DMA传输块时一直占用总线
请求传输模式:外设和DMA中存在DREQ请求和DACK响应。当外设保持DREQ请求时,一直占用总线,否则释放
级联模式:主DMA仅仅负责DMA请求,从DMA工作在前三种模式中的一种
以上是关于计算机组成原理与接口技术笔记的主要内容,如果未能解决你的问题,请参考以下文章