参加CUDA线上训练营CUDA进阶之路 - Chapter 7 -原子操作
Posted Chiao.
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了参加CUDA线上训练营CUDA进阶之路 - Chapter 7 -原子操作相关的知识,希望对你有一定的参考价值。
7.1 原子操作的基本概念
CUDA的原子操作可以理解为对一个Global Memory或Shared Memory中变量进行“读取-修改-写入”这三个操作为一个最小单位的执行过程。它在执行过程中不允许其他并行线程对该变量进行读取和写入操作。
CUDA中的原子操作本质上是让线程在某个内存单元完成读-修改-写的过程中不被其他线程打扰。基于这个机制,原子操作实现了对在多个进程间共享的变量的互斥保护,确保任何一次对变量的操作的结果的确定性。
没有原子操作的后果
Kernel程序最后面直接写 x = x + a x=x+a x=x+a。执行到这一步时, 有很多线程想读取x的值,同时也有很多线程想写入x的值,这就会产生不确定性的错误。
7.1.1 向量元素求和
难点是如何利用shared memory实现分而治之,并且合理地安排线程。最需要注意的地方在于并不是所有线程在所有步骤都会有动作。这里先介绍一种避免使用原子操作的方法。
假设有一个大小为2048的向量,我们想用归约算法对该向量求和。于是我们申请了一个大小为1024的线程块,并声明了一个大小为2048的共享内存数组,并将数据从全局内存拷贝到了该共享内存数组。
我们可以有以下两种方式实现归约算法:
不连续的约归
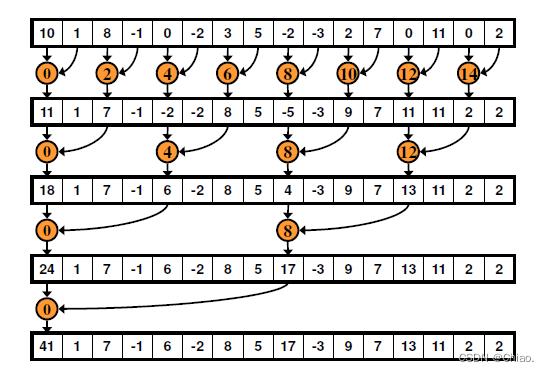
如下图所示,同一个Block内的相邻线程在共享内存中的访问步长为2,因此是不连续的约归方式,而由之前的文章访问步长与bank conflict一节节所讲,这将会发生Bank Conflict。
实现代码如下:
// 非连续的归约求和
__global__ void BC_addKernel(const int *a, int *r)
__shared__ int cache[ThreadsPerBlock];
int tid = blockIdx.x * blockDim.x + threadIdx.x;
int cacheIndex = threadIdx.x;
// copy data to shared memory from global memory
cache[cacheIndex] = a[tid];
__syncthreads();
// add these data using reduce
for (int i = 1; i < blockDim.x; i *= 2)
int index = 2 * i * cacheIndex;
if (index < blockDim.x)
cache[index] += cache[index + i];
__syncthreads();
// copy the result of reduce to global memory
if (cacheIndex == 0)
r[blockIdx.x] = cache[cacheIndex];
连续的约归
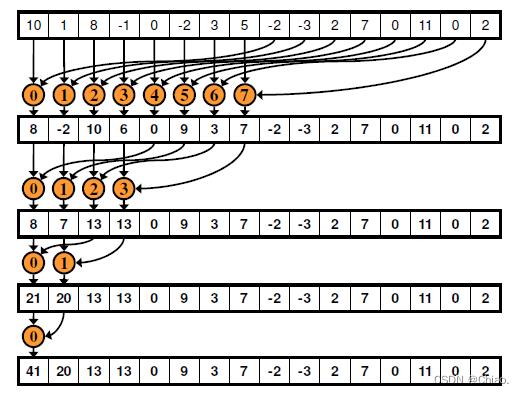
如下图所示,同一个Block内的相邻线程在共享内存中的访问步长为1,由于每个线程的ID与操作的数据编号一一对应,因此很明显不会产生bank冲突。
实现代码如下:
// 连续的归约求和
__global__ void NBC_addKernel2(const int *a, int *r)
__shared__ int cache[ThreadsPerBlock];
int tid = blockIdx.x * blockDim.x + threadIdx.x;
int cacheIndex = threadIdx.x;
// copy data to shared memory from global memory
cache[cacheIndex] = a[tid];
__syncthreads();
// add these data using reduce
for (int i = blockDim.x / 2; i > 0; i /= 2)
if (cacheIndex < i)
cache[cacheIndex] += cache[cacheIndex + i];
__syncthreads();
// copy the result of reduce to global memory
if (cacheIndex == 0)
r[blockIdx.x] = cache[cacheIndex];
代码的过程如下图所示,注意这样则到的结果仍然是一个数组,数组中的一个数代表一个Block所对应数据之和。也就是说,上述过程仅能算出一个Block内的数据之和。要进一步获得向量所有元素之和,则将上一步的输出结果作为第二次核函数执行的输入即可。
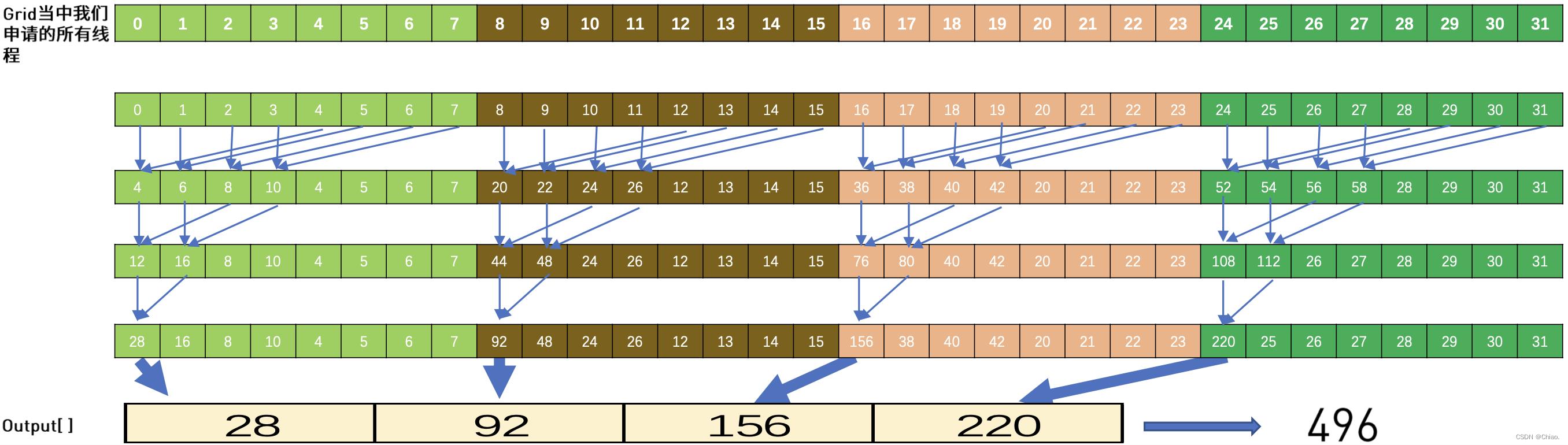
由此可见,对向量进行求和,如果不用原子操作,则还需要将核函数执行多次才能得到最终的结果。
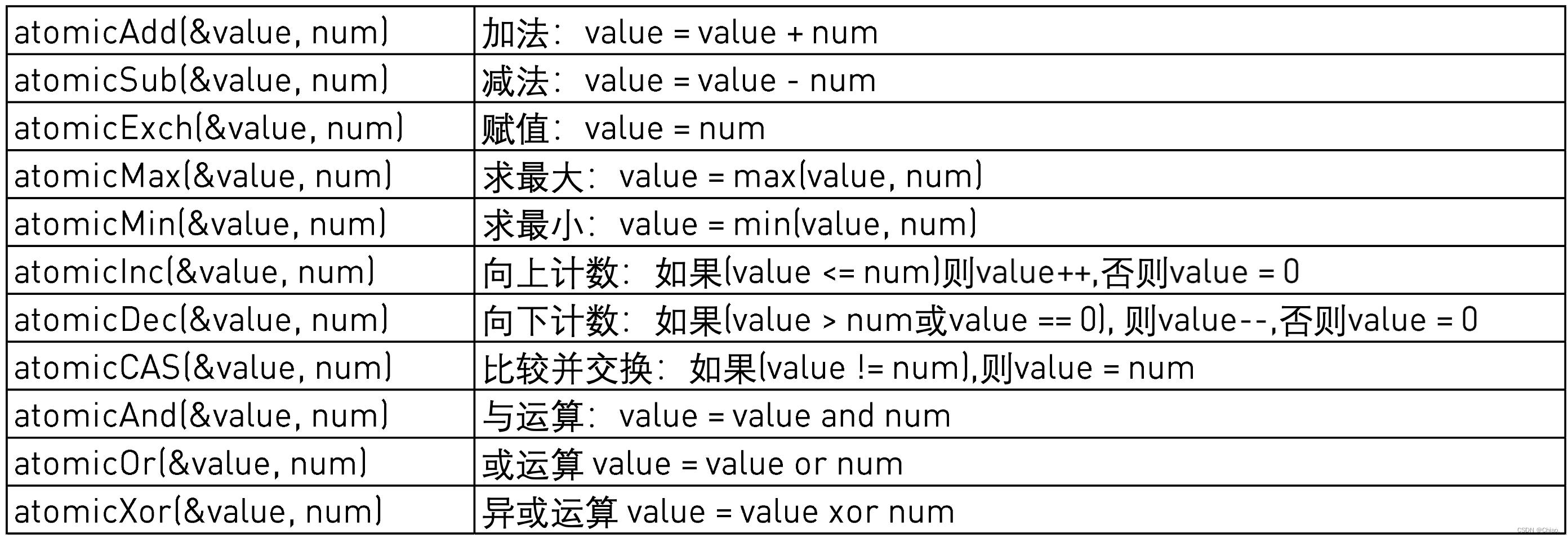
7.2 原子操作的常用函数
原子函数对驻留在全局或共享内存中的一个32位或64位字执行读-修改-写原子操作。
7.3 原子操作向量求和实例
前面提到过,在不使用原子操作的情况下,无法对存储单元中的任何一个变量进行累加操作,因为有很多线程想读取x的值的同时,也有很多线程想写入x的值,这样会产生不确定性的错误。
而引入原子操作就可以让各个线程之间彼此互不影响,可将结果累加到output,就不需要再在第二轮的执行了。
实现代码如下:
__global__ void _sum_gpu(int *ptr, int count, int *result)
__shared__ int sum_per_block[THREADSPERBLOCK];
int tmp = 0;
for(int idx = threadIdx.x + blockIdx.x * blockDim.x; idx < count; idx += gridDim.x * blockDim.x)
tmp += ptr[idx];
sum_per_block[threadIdx.x] = tmp;
__syncthreads();
for(int length = THREADSPERBLOCK / 2; length > 0; length /= 2)
int sum_up = -1;
if(threadIdx.x < length)
sum_up = sum_per_block[threadIdx.x] + sum_per_block[threadIdx.x + length];
// __syncthreads();
sum_per_block[threadIdx.x] = sum_up;
__syncthreads();
if(threadIdx.x == 0)
|\\colorboxOrangeRed!40atomicAdd(result, sum\\_per\\_block[0])|;
以上是关于参加CUDA线上训练营CUDA进阶之路 - Chapter 7 -原子操作的主要内容,如果未能解决你的问题,请参考以下文章
在 VS2010 中使用 Nvidia NSight 进行 CUDA 性能分析 - 时间线上的片段
Pytorch拓展进阶:Pytorch结合C++以及Cuda拓展