基于全景相机的深度学习综述
Posted Being_young
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了基于全景相机的深度学习综述相关的知识,希望对你有一定的参考价值。
文章:Deep Learning for Omnidirectional Vision: A Survey and New Perspectives
作者:Hao Ai˚, Zidong Cao˚, Jinjing Zhu, Haotian Bai, Yucheng Chen, and Lin Wang
编辑:点云PCL
来源:arXiv 2022
欢迎各位加入免费知识星球,获取PDF论文,欢迎转发朋友圈。文章仅做学术分享,如有侵权联系删文。未经博主同意请勿擅自转载。
公众号致力于分享点云处理,SLAM,三维视觉,高精地图相关的文章与技术,欢迎各位加入我们,一起交流一起进步,有兴趣的可联系微信:920177957。本文来自点云PCL博主的分享,未经作者允许请勿转载,欢迎各位同学积极分享和交流。
摘要
全景图像(ODI)数据是用360° *180°视场相机拍摄的,比针孔相机宽得多,比传统平面图像包含更丰富的空间信息。因此,全景视觉由于其在许多应用中的更优越性能而引起了广泛的关注,例如自动驾驶和虚拟现实。本文对用于全景视觉的DL方法的最新进展进行了系统和全面的回顾和分析。我们的工作包括四个主要内容:
(i)介绍全景成像的原理、ODI上的卷积方法和数据集,以突出与2D平面图像数据相比的差异和困难;
(ii)全方位视觉DL方法的结构和层次分类;
(iii)最新的新型学习策略和应用概述;
(iv)通过突出潜在的研究方向,对挑战和开放性问题进行深入的讨论。
主要贡献
本文对用于全景视觉的DL方法的最新进展进行了系统和全面的回顾和分析,强调了DL的重要性,并系统全面地探讨了全景视觉的最新进展。本研究中提出的结构和层次分类如图1所示。
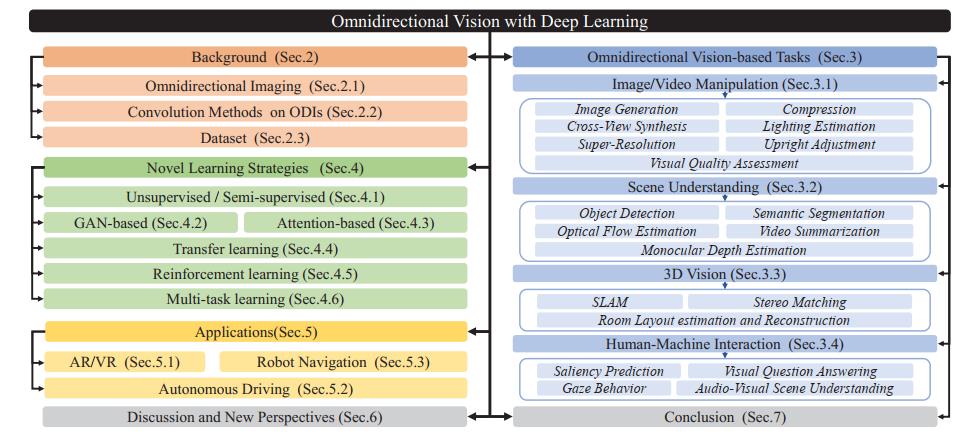
图1:具有深度学习的全景视觉的层次和结构分类

图2:具有代表性的360°摄像机示例
总之,本研究的主要贡献可概括如下:
(I)这是第一次全面回顾和分析用于全景视觉的DL方法的调查,包括全方位成像原理、表示学习、数据集、分类、,以突出与2D图像数据的差异和困难。
(2)总结了过去五年中发表的大多数顶级会议/期刊作品(超过200篇论文),并对全方位视觉DL的最新趋势进行了分析研究,包括层次和结构。此外,我们还为每个类别的讨论和挑战提供见解。
(3)总结了全向视觉的最新新学习策略和潜在应用。
(4)由于全景视觉的DL是一个活跃而复杂的研究领域,我们对有待解决的挑战和开放问题进行了深入的讨论,并提出了未来的潜在方向,以推动社区进行更深入的研究。
(5)我们创建了一个开源存储库,提供所有提到的作品和代码链接的分类,将继续用这方面的新作品更新我们的开源存储库,并希望它能为未来的研究提供线索。仓库链接是https://github.com/VLISLAB/360-DL-Survey.
主要内容
全景图像模型
普通相机的FoV小于180度,因此最多只能拍摄一个半球。然而,理想的360°摄像机可以捕捉从各个方向落在焦点上的光线,使投影平面成为一个完整的球面。

图3:Equirectangular Projection (ERP)、 Cubemap Projection (CP)和 Tangent Projection表示类型的图示。
ODI的卷积方法
由于ODI的自然投影表面是一个球体,因此当将球形图像投影回平面时,标准的CNN不太能够处理固有的失真。已经提出了许多基于神经网络的方法来增强从球形图像中提取“无偏”信息。这些方法可分为两大类:
(i)在平面投影上应用2D卷积滤波器;
(ii)直接利用球面域中的球面卷积滤波器。
基于平面投影的卷积

图4:ODI上基于ERP的卷积滤波器的图示
球形卷积
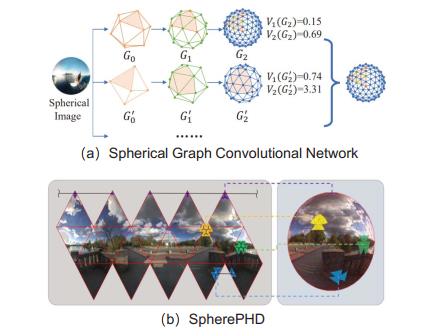
图5:两种代表性的球面卷积方法
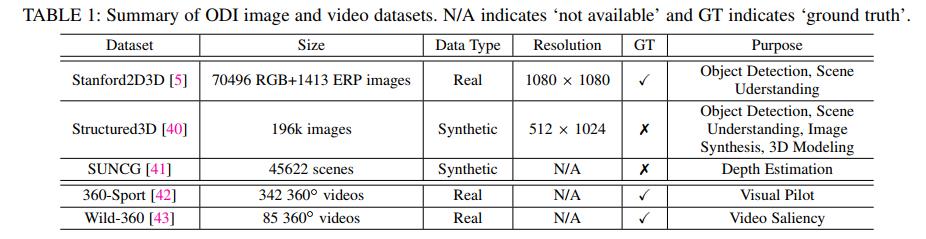
数据集
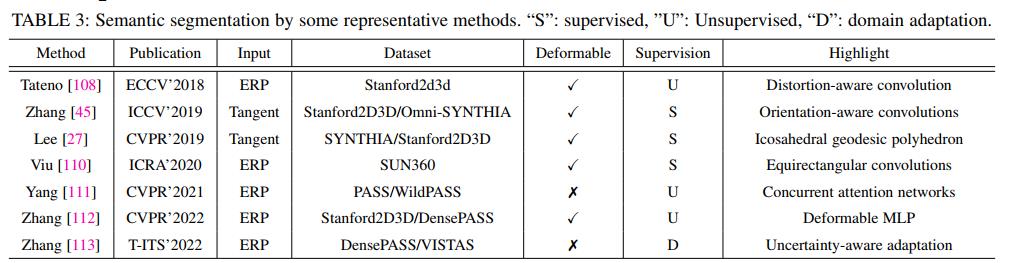
ODI语义分割的代表性方法
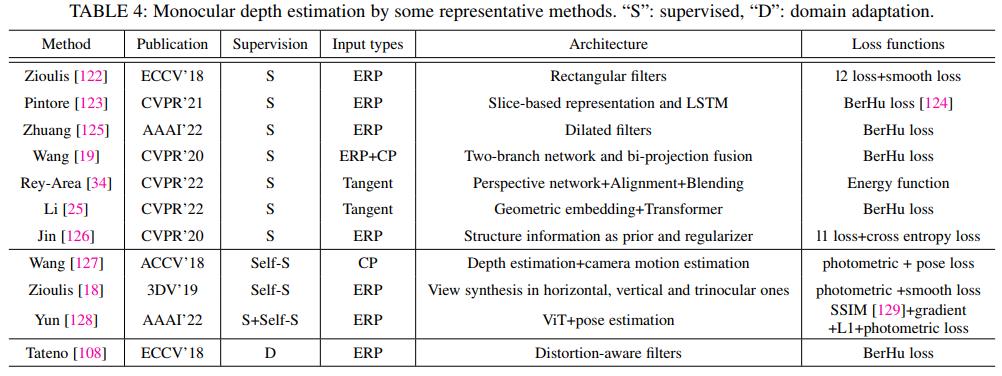
全景相机的深度估计
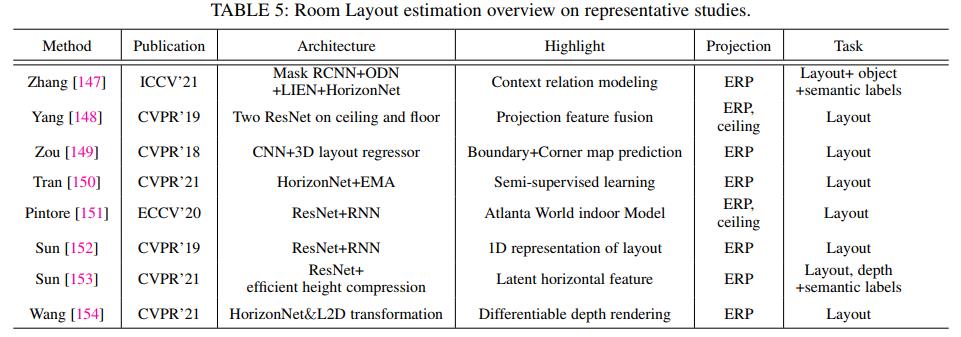
房间布局重建
总结
全面回顾和分析了用于全景视觉的DL方法的最新进展,首先介绍了全向成像的原理、卷积方法和数据集。然后,我们提供了DL方法的层次和结构分类。对于分类学中的每一项任务,我们总结了当前的研究现状,并指出了机遇和挑战。然后进一步回顾了新的学习策略和应用。在构建了现有方法之间的联系之后,我们讨论了需要解决的关键问题,并指出了未来有前景的研究方向,希望这项工作能为研究人员提供一些见解,并促进社区的进步。
更多详细内容请加入知识星球查看原文。
资源
自动驾驶及定位相关分享
【点云论文速读】基于激光雷达的里程计及3D点云地图中的定位方法
自动驾驶中基于激光雷达的车辆道路和人行道实时检测(代码开源)
更多文章可查看:点云学习历史文章大汇总
SLAM及AR相关分享
结构化PLP-SLAM:单目、RGB-D和双目相机使用点线面的高效稀疏建图与定位方案
如果你对本文感兴趣,请后台发送“知识星球”获取二维码,务必按照“姓名+学校/公司+研究方向”备注加入免费知识星球,免费下载pdf文档,和更多热爱分享的小伙伴一起交流吧!
以上内容如有错误请留言评论,欢迎指正交流。如有侵权,请联系删除
扫描二维码
关注我们
让我们一起分享一起学习吧!期待有想法,乐于分享的小伙伴加入免费星球注入爱分享的新鲜活力。分享的主题包含但不限于三维视觉,点云,高精地图,自动驾驶,以及机器人等相关的领域。
合作方式:微信“920177957”(需要按要求备注) 联系邮箱:dianyunpcl@163.com,欢迎企业来联系公众号展开合作。
点一下“在看”你会更好看耶
以上是关于基于全景相机的深度学习综述的主要内容,如果未能解决你的问题,请参考以下文章