视锥体剔除(Frustum Culling)算法详解-透视投影矩阵直接推导
Posted 赵新政
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了视锥体剔除(Frustum Culling)算法详解-透视投影矩阵直接推导相关的知识,希望对你有一定的参考价值。
前言
本文章介绍了如何从投影矩阵(ProjectionMatrix)推导,得到视锥体(Frustum)的六个面的面方程,并且判断一个**点(point)是否在视锥体范围内,或者包围球(Bound ing Sphere)**是否与视锥体相交。
当然,我们也可以通过ViewMatrix,将平面萃取到摄像机坐标系空间;或者通过叠加WorldModelMatrix,将平面萃取到世界坐标系空间。
课程传送门:
如果对OpenGL感兴趣的同学,可以点击下方链接,获取相关课程:
CSDN:OpenGL从小白到精通
腾讯课堂:OpenGL从小白到精通
提示:以下是本篇文章正文内容,下面案例可供参考
一、清晰我们的目标
首先我们考虑最简单的情况,如果给我们一个Perspective Projection Matrix(透视投影矩阵),并且同时,物体的ModelMatrix为单位阵且相机矩阵(ViewMatrix)为单位阵,那么就会如下图所示: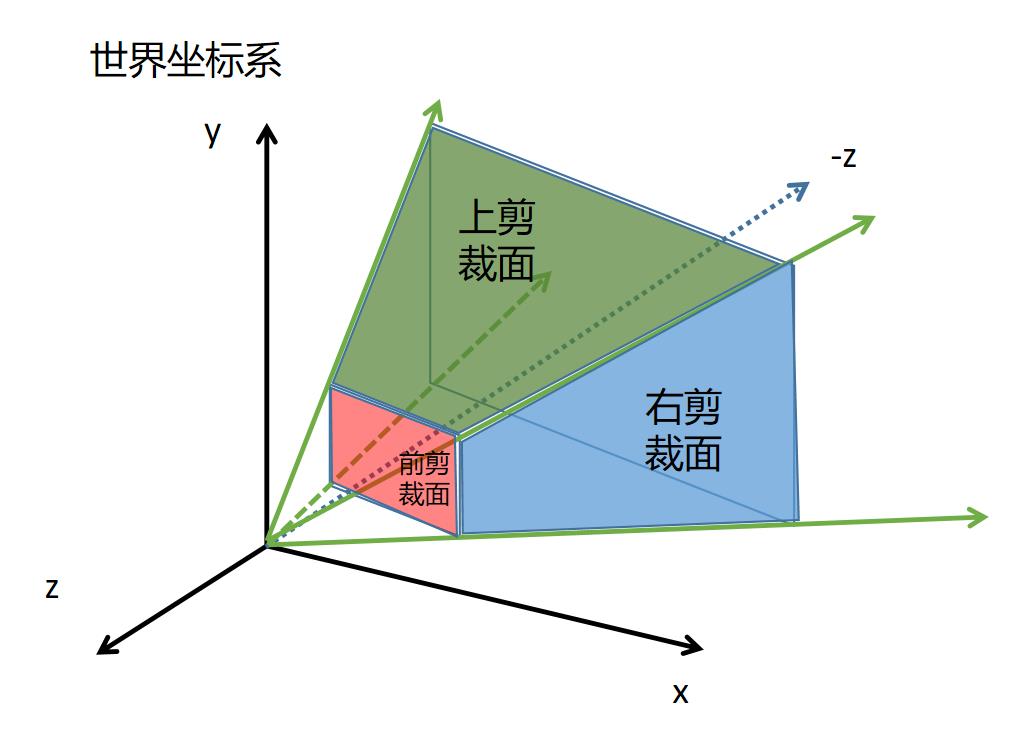
在这张图上,我们可以看到通过ProjectionMatrix,我们构成了六个平面,分别是top,bottom,left,right,near,far。
我们的目标是:判断一个点或者一个包围球,是否在这六个面包围的空间里。
那我们就这个终极目标做一下分析:
- 首先我们需要选定一种平面的方程形式来对这六个面进行表达,根据LearnOpenGL里面的说法,可以通过构建Camera的投影矩阵的一系列系数进行向量构建,然后运算得到平面的法线-距离表达的方程式。使用平面的法线-距离的表达方程式,我们非常认可(后文会仔细研究这种形式)。
- 其次,对于LearnOpenGL的方法通过摄像机的参数来计算,未免太过于麻烦,我们提出一个想法:可否直接通过ProjectionMatrix这个矩阵的数据来构建出来这六个方程组呢?答案当然是可以的。
OK,我们现在明确了我们的需求,那么就先来研究基础中的基础,平面的法线-距离表达式方程吧!
二、平面的表达式
1.定义解释
所谓平面的法线-距离表达式,直接写出来的样子如下所示:

对于这个式子,我们做一下几何上的剖析,如下图所示:
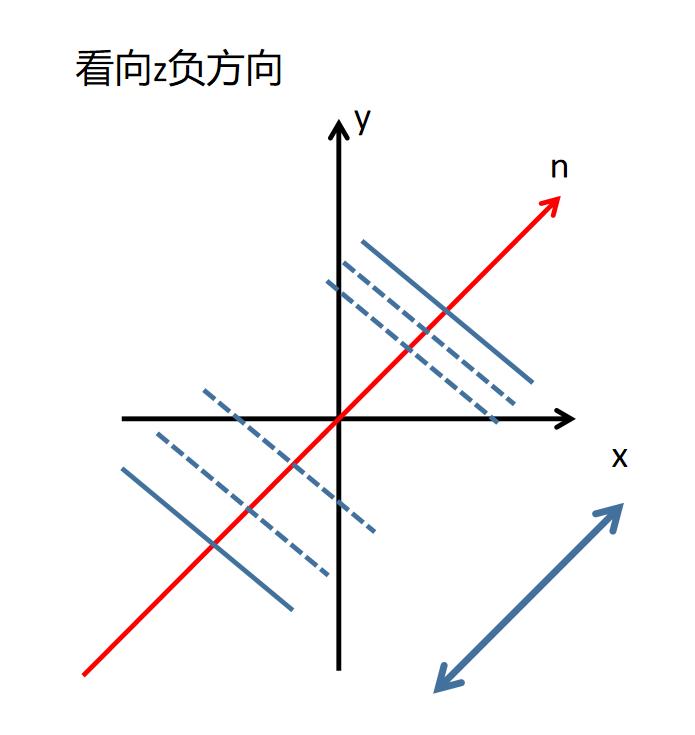
首先我们从坐标系(看向z负方向为例)中,拿到一个向量n(且n是归一化向量),那么我接下来希望构建一个平面,这个平面与n向量垂直,那么这个平面就会有很多种选择。从图上看,平面会沿着蓝色双箭头在向量n上滑动。
那么我们定义n如下所示:

现在我们假设找到了一个平面,需要求它的平面表达式方程,如下图所示:
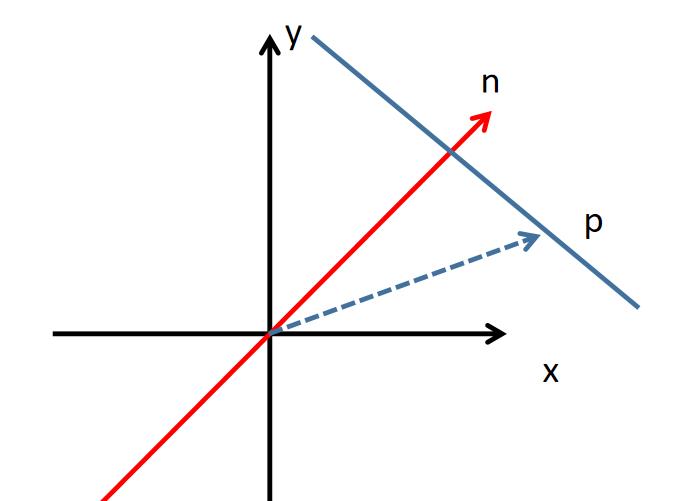
那么对于蓝色平面上任意一点p,肯定都满足某种同一个的条件,下面我们来看看这个条件:
我们先将p与n做点乘,根据点乘的定义:


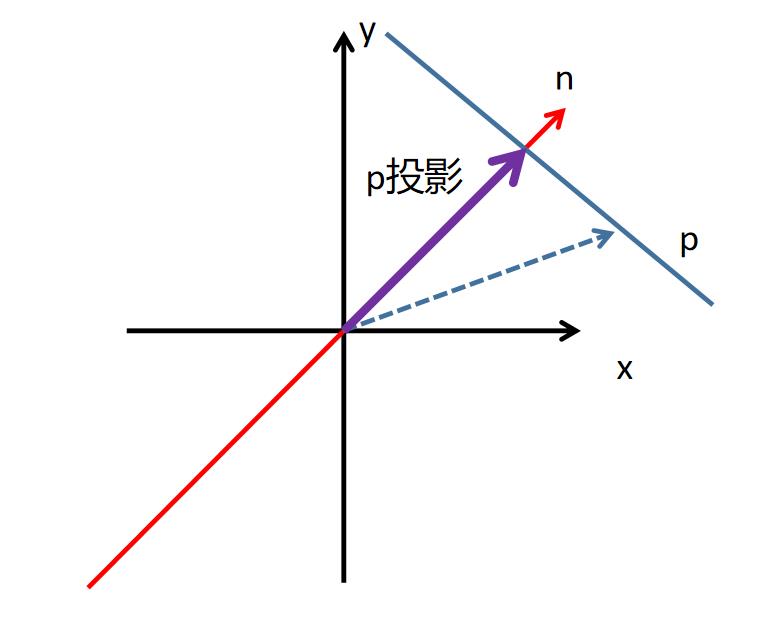
此时,由于n是归一化向量(注意!不要忽略),那么就会得到p在n上的投影值(两者夹角小于90度为正,大于90度为负)。那么做出来的投影绝对值,不就是平面与原点(0, 0, 0)的距离么!如下图所示:
现在我们可以来写一写平面的方程式了,我们定义d是平面到原点的距离(可正可负),为了满足如下方程:
当d是正数,那么平面一定是从原点开始,沿着n向其反方向移动了|d|的长度;
当d是负数,那么平面一定是从原点开始,沿着n向其正方向移动了|d|的长度。
如下图所示:
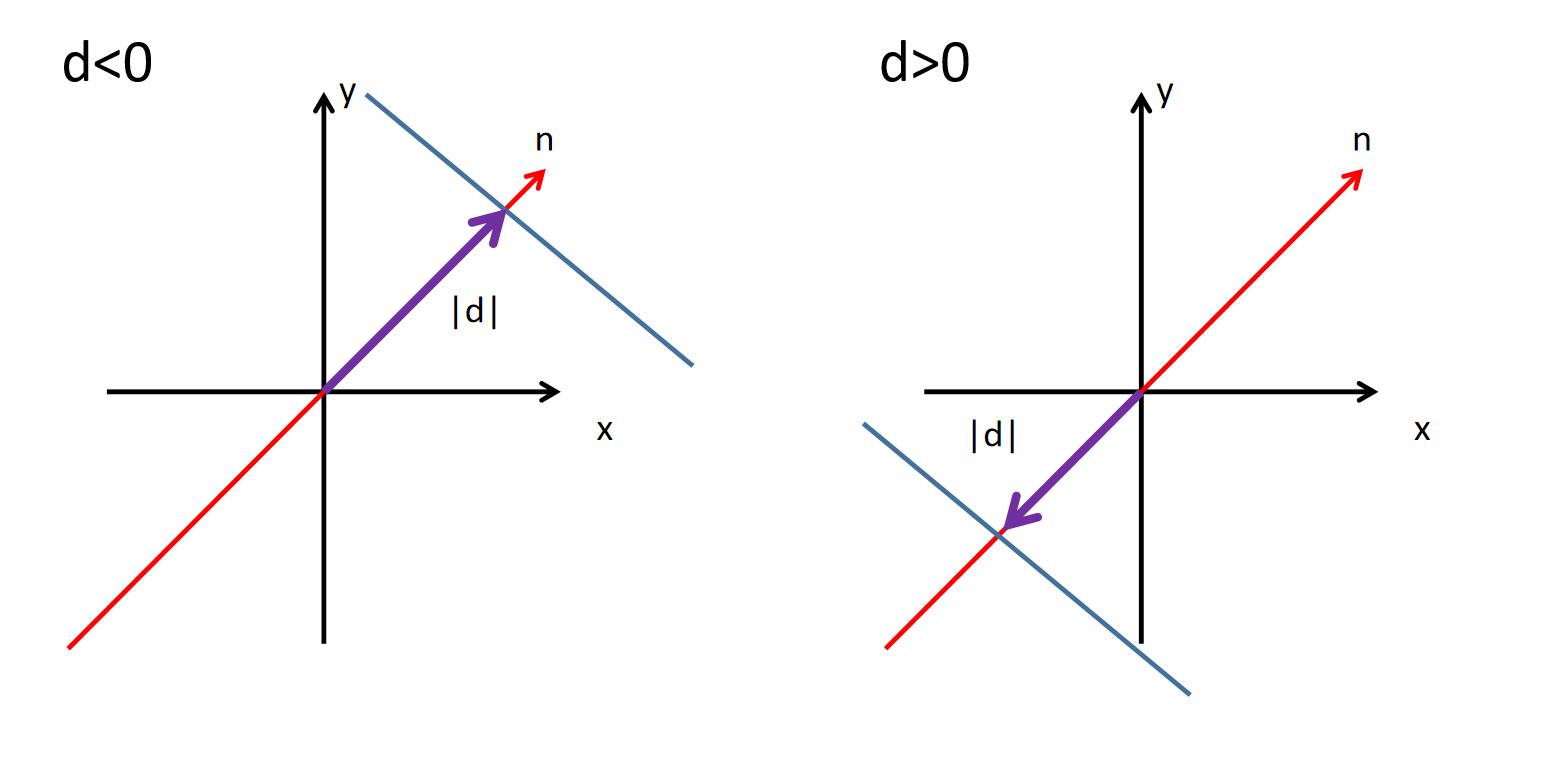
我们可以得到一个物理上的结论:
首先规定一个坐标系原点,然后从原点为起点,长出来一个向量n。随后d所代表的是,平面从零点为起点,沿着n这跟轴,向正或者反移动多少。
2.任意点与平面的关系
在得知了平面的方程式之后,如果我们在空间里随意挑选一个点,将其坐标值带入到平面的方程式,到底意味着什么东西呢?
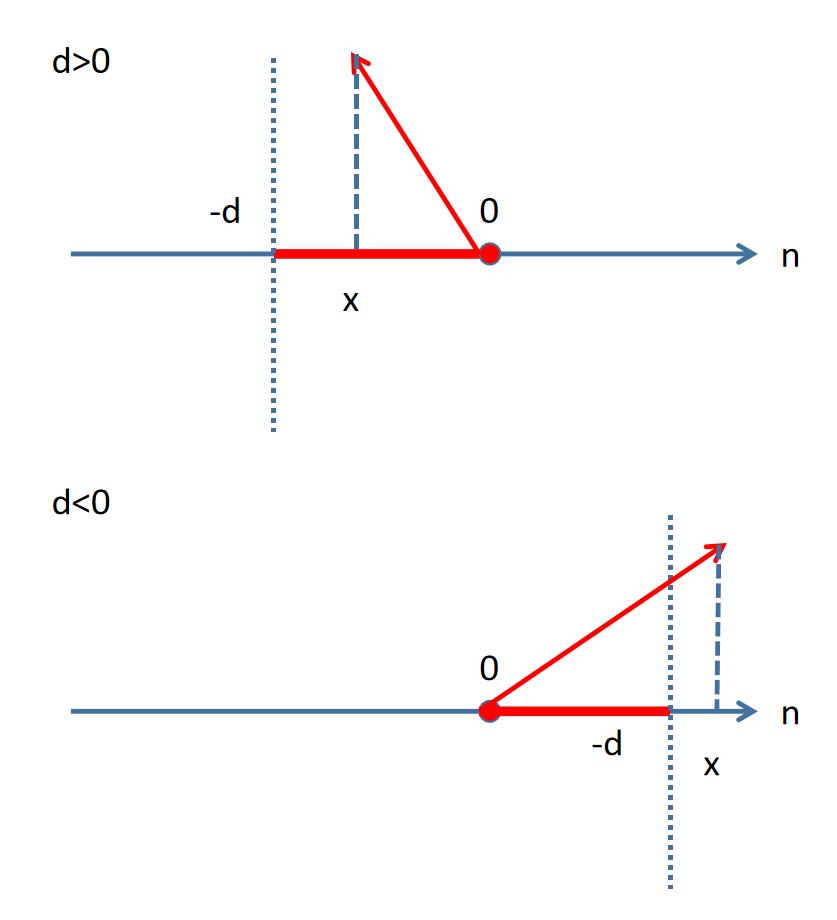
我们首先把n这个向量当作一个数轴,坐标系的原点就是数轴的0坐标点,那么平面方程其实就是在描述任意点与归一化向量n点乘之后,在数轴上的位置与d的关系。如下图所示:

那么我们就可以利用平面把空间分割成两个部分:一个是在平面左边;一个是在平面右边。当然,整个表达式为0,就说明在平面上。(上图所示的-d,是平面穿过数轴上的点的坐标)
我们再来欣赏一下点在n方向相同一侧(即平面正面)的情况:
可以发现如下式子:

同理,我们再欣赏下点在n方向相反一侧(即平面反面)的情况:
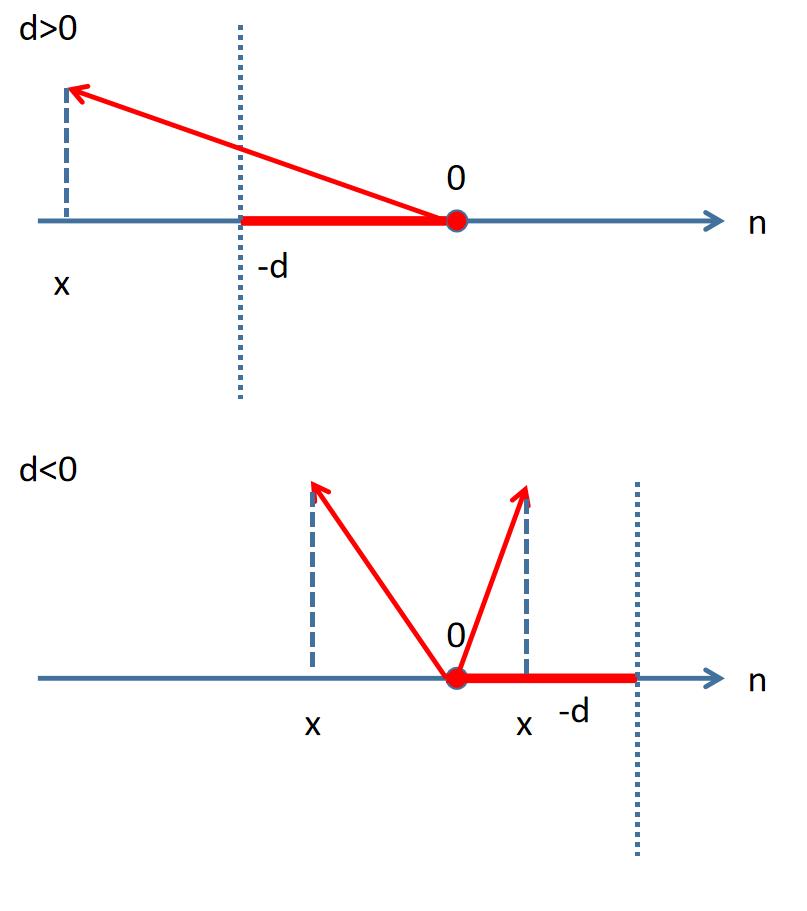
可以发现如下式子:

ok!我们现在得到了一个重要结论,将任一点带入到平面的方程式,如果我们得到一个非0值,那么这个值就是点到平面的距离(可正可负)。如果这个距离为正,则与n同侧;如果这个距离为负,则与n不同侧。
3 总结
如果我们得到了一个面的法线-距离的表达式,那么我们通过将任意一点的坐标值带入,就可以得到一个数字,这个数字就是点到平面的距离(可正可负)。如果是正数,就位于平面正面;如果是负数,就位于平面反面。
三、由透视投影矩阵计算平面方程
我们接下来的目标,就是使用projectionMatrix来构建这视锥体平面的方程表达式。
首先我们来回顾下,透视投影矩阵的用处是什么。利用透视投影矩阵与某个点(p)的齐次坐标相乘,我们可以得到一个半NDC坐标( ),即还没有除以w的NDC坐标。
),即还没有除以w的NDC坐标。
令的xyz坐标同时除以w之后,我们就得到了NDC坐标(p_ndc),那么在OpenGL的NDC坐标标准下,p_ndc的xyz三个值都应该是在-1到1之间,即:



然后我们把点与透视投影矩阵相乘的形式,也给写出来:
此时我们得到的还并不是NDC坐标,所以我们需要除以最后的w值,从而得到NDC,如下:
现在我们得到了NDC坐标的表达式,由于所有坐标都必须在-1到1之间才能算作在视锥体范围内。
那么我们就可以先考查下最左边的视锥体平面,如果这个点直接在视锥体的内部,那么在NDC坐标中,它的x一定是大于-1的,我们可以得到:

可以看到,我们得到了一个平面的方程,其中平面方程系数如下:
从目前的条件来看,方程计算结果如果大于零,那么这个点就会位于视锥体左平面之内,根据我们之前的结论:
如果这个距离为正,则与n同侧;如果这个距离为负,则与n不同侧。
我们可以得出一个结论:本平面方程法向量是指向视锥体内侧的,并且点位于本平面正面的话,就可以在这个面的检测中,认为是在视锥体内。随后我们对其他面也应用同样的手段,如果全部通过,则认为点在视锥体范围之内,从而不会剪裁!
注意:
但是,我们还没有结束,如果看一下视锥体的右侧面(即与前面所述相反的面),就会发现有所不同。如果对右侧面进行检测,则NDC坐标的x值必须小于1,我们可以得到如下式子:

我们会发现,这个式子判定的方法是带入的结果小于零才算做通过检测,这样的话不利于我们的代码写作,所以我们可以把判别式两边都乘以-1,就可以得到:

好了,这样的条件我们就很舒服了,所以我们必须将判别式们都统一成为大于零才通过检测的方式。接下来,我们就可以列出来所有的六个平面的表达式:
左面:

右面:
上面:

下面:

近面:

远面:

在一个循环当中,对这六个表达式进行判别,如果全部通过,则认为是在Frustum以内。
四、包围球与视锥体相交判断
我们现在引入一个例子,即包围球与视锥体的相交判断。我们直到包围球有两个关键变量,一个是球心坐标center,一个是半径radius。
我们对这件事的研究,用到了我们第二节所用的观察方法,即将平面的法向量n看作是从坐标原点伸出来的一个轴,我们所有的数值研究都放在这个轴上进行。如下所示:
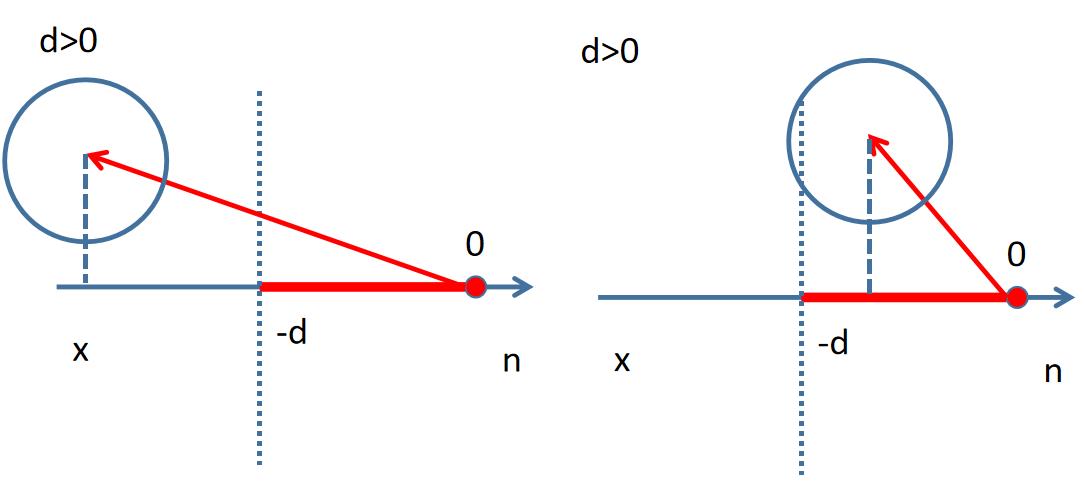
图中零点在n的起点,竖直虚线表示面
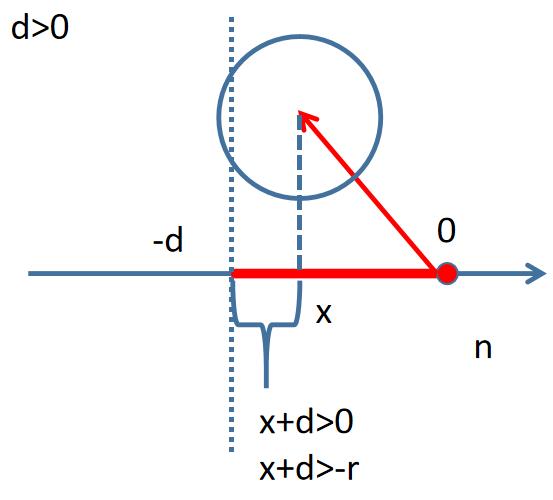
我们可以先在d>0的情况下观察,左边是球在平面反面;右边是球在平面正面。在正面的基本就不用再看,肯定通过了检测。但是我们观察左图,如果球的半径再大一些,还是有机会与平面产生相交从而通过检测的,所以我们不能单单看球心是否在平面的正面。如下图所示:
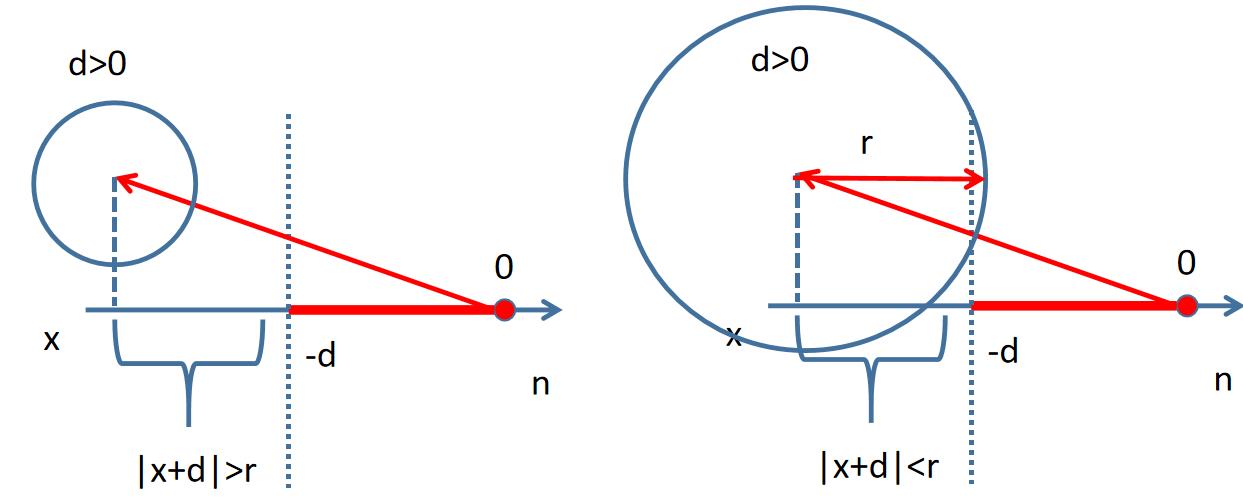
图中零点在n的起点,竖直虚线表示面
图中,x+d不就是将球心center带入到平面方程后得到的距离值么,在上图的情况下,这个结果是负数,所以我们加了绝对值号。如果|x+d|>r,我们就会看到球的一部分已经跑到了平面的正面,所以这个球就可以不被剔除了,做成表达式如下所示:

即满足了这个条件,就可以判定球通过了检测。那么如果球心本来就在平面的正面呢?是否也满足呢?如下图所示:
图中零点在n的起点,竖直虚线表示面
我们发现,x+d直接大于零,那么也肯定大于-r,所以这两种情况下,上述判别式都可以使用。我们接下来检查下d<0的情况;如下图所示:
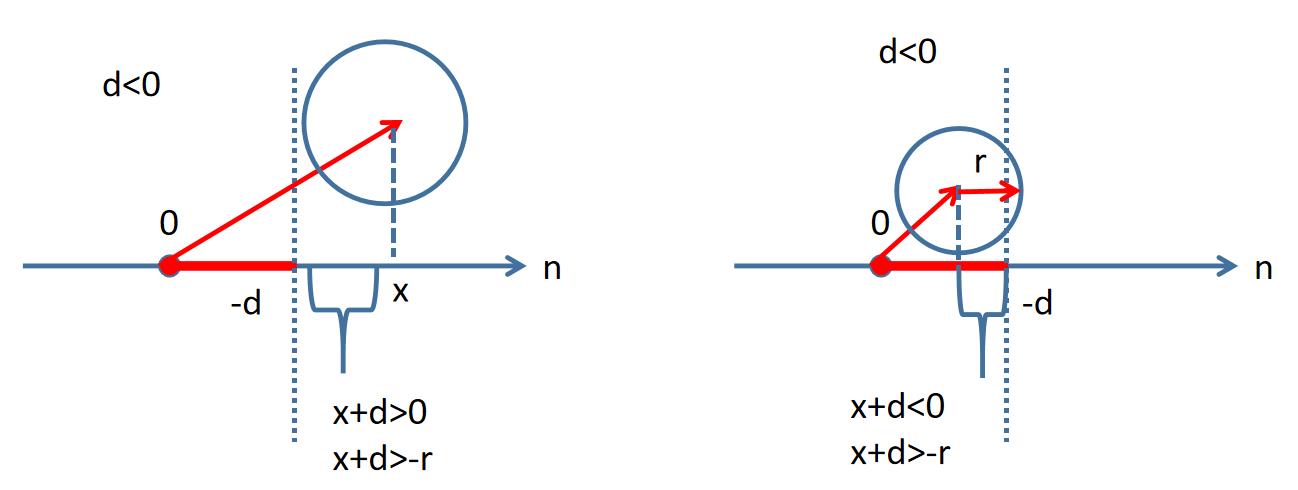
我们发现在这种情况下,判别式也成立,所以最终的结论是:我们可以通过如下判别式,进行判别,如果成立,则球与视锥体有交集,否则没有。
五、结论
在这篇文章中,我们推到了直线的法线-距离方程,并且详细阐述了其几何意义。并且给出了从projectionMatrix推导六个平面方程的方法,最后给出了包围球测试相交的算法。
如果对OpenGL学习感兴趣的同学,可以点击下方链接,学习OpenGL图形学的相关知识:
CSDN:OpenGL从小白到精通
以上是关于视锥体剔除(Frustum Culling)算法详解-透视投影矩阵直接推导的主要内容,如果未能解决你的问题,请参考以下文章